毕业设计开题报告表
美术与设计学院本科毕业设计(创作)
开题报告表
课题题目 衍纸在现代装饰艺术中的应用
学生姓名
学 号
所学专业 艺术设计
导师姓名
报告日期 2013年11月16日
美术与设计学院制
关于本科毕业设计(创作)开题报告的规定
为切实做好本科毕业设计(创作)的开题报告工作,保证设计(创作)质量,特作如下规定:
一、开题报告是本科毕业设计(创作)的必经过程,所有本科生在毕业设计(创作)之前都必须作开题报告。
二、开题报告主要检验学生对专业知识的驾驭能力和研究能力,考察设计(创作)的准备工作是否深入细致,包括选题是否恰当,资料占有是否翔实、全面,对国内外的研究状况是否了解,本人的研究是否具有创新性等。
三、毕业设计(创作)开题报告前,学生必须根据所学专业培养目标,与教师双向选择后确定选题,根据任务书广泛查阅文献,深入调查,收集资料,制定研究方案,在此基础上撰写开题报告。
四、学生设计(创作)开题前需认真填写开题报告表,并向导师提出申请,由毕业设计(创作)指导小组负责开题报告的评议。
五、毕业设计(创作)指导小组应当对开题报告进行认真评议,主要评议设计(创作)是否恰当,研究设想是否合理、可行,研究内容与方法是否具有开拓性、创新性,是否可以开始进行设计和创作等。评议结果分为“合格”和“不合格”两种,学生开题报告评议结果须为“合格”方可开始设计和创作。毕业设计(创作)指导小组不得少于3人。
六、开题报告表应送交所在院(部)保存。
七、表中各项可自行加页。

第二篇:倒立摆毕业设计开题报告
毕业论文开题报告
论文题目: 单级倒立摆机电系统建模,仿真与控制(基于能量的建模方法)
一 课题背景:
1 单级倒立摆模型
在惯性参考系下的水平面上,倒摆由无质量的轻杆和一定质量的小球组成,轻杆通过转动关节安装在小车上.在不考虑空气阻力、摩擦力,并且忽略杆的质量及其弹性变形的情况下,定义 和
和 分别表示小车偏离基准点的水平位置(小车位移)和倒摆偏离竖直方向的角度(倒摆摆角).设小车的质量为 ,小球的质量为m,杆长为z,小车水平方向的驱动力为n.单级倒立摆系统的物理结构如图1所示.
分别表示小车偏离基准点的水平位置(小车位移)和倒摆偏离竖直方向的角度(倒摆摆角).设小车的质量为 ,小球的质量为m,杆长为z,小车水平方向的驱动力为n.单级倒立摆系统的物理结构如图1所示.
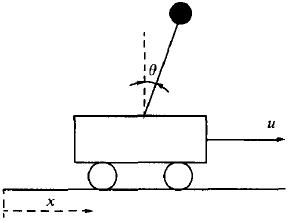
图1 倒立摆系统物理结构示意图
2 倒立摆的发展与研究
倒立摆系统是一个典型的非线性、强耦合、多变量和不稳定系统,同时也是一种广泛应用的物理模型,倒立摆控制理论产生的方法和技术在半导体及精密仪器加工、机器人技术、导弹拦截控制系统、航空器对接控制技术等方面有广泛的应用,由于倒立摆系统与火箭飞行以及机器人控制具有很大的相似性,已成为人们研究和验证各种控制理论有效性的实验系统,因此对其进行非线性控制方法研究具有重要的理论和实践意义。在中外有很多学者对倒立摆系统做过深入研究有基于MATLAB单级倒立摆系统研究,单级倒立摆的逼近逆模型及趋近控制研究等。对于单级倒立摆系统,目前已有多种控制方法可对其实现稳摆控制。典型的有线性PID控制、常规PID控制、LQR控制、智能控制,模糊控制等。
早在60年代人们就开始了对倒置系统的研究,1966年Schaefer和Cannon应用Bang一_Bang控制理论,将一个曲轴稳定于倒置位置。在60年代后期,作为一个典型的不稳定、严重非线性之例,人们提出了倒立摆概念,并用其检验控制方法对不稳定、非线性和快速性系统的处理能力,受到世界各国许多科学家的重视,用不同的控制方法控制不同类型的倒立摆,成为具有挑战性的课题之一。倒立摆系统的控制目标是使倒立摆这样一个不稳定的被控对象,通过引入适当的控制方式使之成为一个稳定的系统,系统上表现为把摆稳定地竖立在本来不稳定的竖直位置。
3 倒立摆的控制方法
控制器设计是倒立摆系统的核心内容.因为倒立摆是一个绝对不稳定的系统,为了实现倒立摆稳定性控制.并且可以承受一定的干扰,需要给系统设计控制器。
目前典型的控制器设计理论有:
a.PID控制
通过机理分析建立动力学模型,使用状态空间理论推导出非线性模型,并在平衡点处进行线性化得到系统的状态方程和输出方程,从而设计出PID控制器实现控制。
b.状态反馈控制
使用状态空间理论推导出状态方程和输出方程,应用状态反馈实现控制。如刘珊中等应用状态反馈和Kalman滤波相结合的方法,对二级倒立摆平衡系统进行控制。
c.利用云模型实现对倒立摆的控制
用云模型构成语言值,用语言值构成规则,形成一种定性的推理机制。这种拟人控制不要求给出被控对象精确的数学模型,仅仅依据人的经验、感受和逻辑判断,将人用自然语言表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,解决非线性问题和不确定性问题。张明廉等利用拟人控制的思想形成非线性控制律,并确定出反馈系数间的相对关系“”,从而成功地实现了二级倒立摆的稳定。
d.模糊控制。
模糊控制是采用模糊化、模糊推理、解模糊运算等的模糊控制方法。其主要工作是模糊控制器的设计。
e.神经网络控制。
神经网络能够任意充分地逼近复杂的非线性关系,它能够学习和适应严重不确定性系统的动态特性,所有定量或定性的信息按等势分布储存与网络内的神经元,有很强的鲁棒性和容错性,也可将Q学习算法和剧,神经网络有效结合,实现状态未离散化的倒立摆的无模型学习控制。以及杨振强等为解决模糊神经网络在控制多变量系统时的规则组合爆炸问题,提出用状态变量合成模糊神经网络控制倒立摆。
f.自适应控制。
主要为倒立摆设计各种自适应控制器。
4 倒立摆的建模方法
利用不同的建模方法对其进行建模并采用相应的控制算法,可以得到不同的控制效果。常用于倒立摆建模的方法有两个,一是基于系统能量的Lagrange方程法建立倒立摆系统的数学模型,二是采用动力学方程的力矩平衡法。
a.基于系统能量的Lagrange方程法。此法控制系统,建立倒摆动能与势能的方程,这种数学建模方法有如下特点,1)它是以广义坐标表达的任意完整系统的运动方程式,方程式的数目和系统的自由度数是一致的。2)理想约束反力不出现在方程组中,因此在建立运动方程式时,只需分析己知的主动力,而不必分析未知的约束反力。3)Lagrange方程是以能量观点建立起来的运动方程式,为了列出系统的运动方程式,只需要从两个方面去分析,一个是表征系统运动的动力学量~系统的动能,另一个是表征主动力作用的动力学量—广义力。4)Lagrange方程数学模型中简化了参数个数,在稳定控制时可以不依赖实际系统中某些参数的精确性。因此用Lagrange方程来求解系统的动力学方程可以大大简化建模过程,Lagrange方程法比较适用复杂倒立摆系统建模。
b.基于牛顿力学力矩平衡的方法。此法一般采用牛顿运动定律建立被控对象的数学模型,一般分析小车(或者摆杆)和各个摆体(多级或者单级)的受力情况,然后列出各个运动方程以及各摆体相对各个转轴处的转动力矩平衡式,再通过求解各摆体运动方程和各个转轴处的转动力矩平衡方程得到倒立摆系统的数学模型,显而易见,此法分析复杂而且要计算大量的微分方程组,如果考虑到质点组受到的约束条件,建模问题将更加复杂。
二 课题目的
采用分析力学中的拉格朗日方程基于能量的建模方法建立了单级倒立摆系统的动力学模型,并对非线性模型利用空间状态方程进行处理,使其成为具有线性化形式的非线性方程.在此基础上,直接设计并给出单级倒立摆系统的非线性位移控制器的函数形式,通过计算得到实时控制律,并通过MATLAB仿真验证了控制方案的有效性.具体分为:
1)建立单级倒立摆的微分方程、并转化为控制系统常用的代数方程(状态空间,基于能量的建立模型方法(port control Hamilton))。
2)单级倒立摆起摆的控制和控制系统设计。
3)用MatLab(M程序)+Simulink设计软件进行仿真分析,检验其稳定性,求出其稳定域度。
通过对单级倒立摆系统的理论分析和研究得出其稳定域度以及控制规律,为以后进行倒立摆系统试验建立理论和实验基础。
三 课题意义
倒立摆的控制方法在军工、航天、机器人领域和一般工业过程中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。因此对其进行非线性控制方法研究以及其稳定性的研究具有重要的理论和实践意义。同时通过以单级倒立摆为被控对象,使我们加深掌握控制系统的数学模型的建立方法和及控制系统的调试方法,掌握MATLAB仿真软件的使用方法,这对以后的机电建模系统也具有深远影响。
目前,倒立摆控制方法的研究正向更深的层次发展,如模拟人的行为控制倒立摆,用系统辨识的方法获得倒立摆的模糊控制规则或专家控制规则,及用自学习的方法得到神经网络控制倒立摆的联接强度,都是当今学术界感兴趣的课题。突加干扰时倒立摆的自恢复能力和大偏差的稳定性处理,是一个很实用的研究方向。
-
毕业设计开题报告范文
浙江师范大学本科毕业设计论文开题报告1本科毕业设计论文开题报告2本科毕业设计论文开题报告3本科毕业设计论文开题报告4本科毕业设计论…
-
毕业设计开题报告范例
南京工程学院毕业设计开题报告课题名称学生姓名指导教师所在院系部专业名称MK2110数控磨床动力学模拟与床身结构优化设计楷体三号加粗…
-
毕业论文开题报告 最佳范文!
CWLJLJWCZY01202毕业论文开题报告论文题目论三网融合对我国电视产业发展的影响学院学院专业广播电视新闻学年级班学号姓名指…
-
毕业论文开题报告范文
[1]毕业论文开题报告开题报告是指开题者对科研课题的一种文字说明材料。这是一种新的应用写作文体,这种文字体裁是随着现代科学研究活动…
- 毕业论文开题报告范文
-
毕业设计 VI设计开题报告
***学院毕业设计(论文)开题报告课题名称:学生姓名:指导教师:所在学院:专业名称:“*****”VI设计学号:职称:艺术学院**…
-
商业海报(招贴)开题报告
商业海报(招贴)设计开题报告设计课题:商业海报(招贴)设计指导老师:吴灿随着社会的进步和科学技术的飞速发展,优秀的富有创意的招贴设…
-
海报招贴设计开题报告 参考
中北大学毕业设计开题报告学生姓名学院系专业设计题目指导教师年月日徐捷学号04052405Z14体育与艺术学院艺术系工业设计海报招贴…
-
范文:毕业设计(论文)开题报告3
武汉工程大学邮电与信息工程学院毕业设计论文开题报告课题名称使用专业开题教师职称年月日武汉工程大学邮电与信息工程学院届毕业设计论文开…
-
20xx届-广告毕业设计开题报告模板
本科生毕业设计开题报告参照模板设计题目粗茶淡饭莲花素食餐厅品牌推广设计作品阐释题目浅析概念营销在素食餐饮企业品牌推广中的运用分院广…