实验39 CCD技术在双棱镜实验中的应用---讲义
实验三十九 CCD技术在双棱镜实验中的应用
【实验目的】
1.掌握菲涅耳双棱镜获得双光束干涉的方法。
2.掌握用双棱镜测定光波的波长的方法。
3.了解CCD的工作原理及其应用。
【实验原理】
1.菲涅耳双棱镜实验
光的干涉现象是光的波动说的基础,而有两束相干光是干涉的必要条件。在实验中,通常是把由同一光源发出的光分成两个相干光束。产生相干光的方式可以分为两种:分振幅法和分波阵面法。双棱镜实验获得相干光的方法是分波阵面法。
 图1所示为经典的杨氏双缝干涉实验,是英国科学家托马斯·杨在1801年设计的。线光源S发光,其波阵面经S1、S2双狭缝分为两束,当符合相干条件时,在两个子波阵面交会的区域干涉,形成明暗相间的平行直条纹。
图1所示为经典的杨氏双缝干涉实验,是英国科学家托马斯·杨在1801年设计的。线光源S发光,其波阵面经S1、S2双狭缝分为两束,当符合相干条件时,在两个子波阵面交会的区域干涉,形成明暗相间的平行直条纹。
正是该实验,给始于牛顿和惠更斯的关于光的本质的争论中的波动说增加了重要的砝码。然而,微粒说的拥护者对该实验提出质疑,认为明暗相间的条纹并非真正的干涉图样而是光经过狭缝时发生的复杂变化。对此非议,在接下来的数年间,菲涅耳设计了几个撇开狭缝的干涉实验,为杨的实验提供了强有力的支持,下面就介绍其中之一的双棱镜干涉实验。
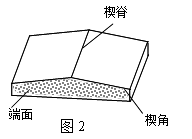 双棱镜的结构如图2所示,将一块平玻璃板的上表面加工成两楔形,两端面与棱脊垂直,楔角较小(一般小于1度)。当单色光源照射在双棱镜表面时,经其折射后形成两束好像由两个光源发出的光,即两列光波的频率相同,振动方向相同,相位差不随时间变化,那么,在两列光波相交的区域内,光强的分布是不均匀的,满足光的相干条件,称这种棱镜为双棱镜。
双棱镜的结构如图2所示,将一块平玻璃板的上表面加工成两楔形,两端面与棱脊垂直,楔角较小(一般小于1度)。当单色光源照射在双棱镜表面时,经其折射后形成两束好像由两个光源发出的光,即两列光波的频率相同,振动方向相同,相位差不随时间变化,那么,在两列光波相交的区域内,光强的分布是不均匀的,满足光的相干条件,称这种棱镜为双棱镜。
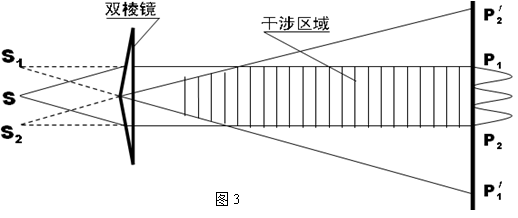
图3所示就是菲涅尔1818年设计的双棱镜干涉实验示意图。杨氏双缝干涉实验中的双狭缝被一个双棱镜所取代。光源S发出的光经双棱镜折射而形成两束相干光,可视为分别从虚光源S1、S2发出。在两光束相交的区域放置观察屏,在P1、P2区间就可以观察到干涉条纹。也就是说,虚光源等效于双狭缝形成了光波的分波阵面干涉。
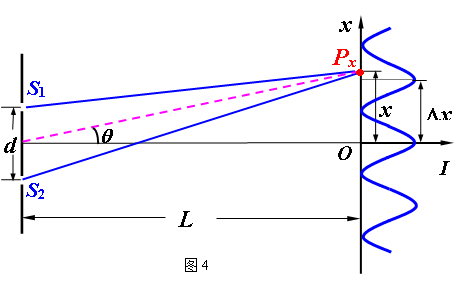
如图4所示,设两虚光源的间距为d ,它们到观察屏的距离为L ,观察点Px的光强为:
 ,
,
式中 为入射光的波长,
为入射光的波长, 为两虚光源的中点和Px点连线与光轴的夹角。
为两虚光源的中点和Px点连线与光轴的夹角。
当 时,
时, ,即干涉光强极大。当
,即干涉光强极大。当 时,
时, ,即干涉光强极小。因此在观察屏上可以看到明暗相间的干涉条纹。
,即干涉光强极小。因此在观察屏上可以看到明暗相间的干涉条纹。
因为  ,角很小,有
,角很小,有  ,故
,故
对于明条纹,有 ,即:
,即:
对于暗条纹,有 即:
即:
因此,相邻两明条纹(或暗条纹)的条纹间距为: 
所以,在实验中只要测得条纹间距 ,就可以计算出干涉光源的波长:
,就可以计算出干涉光源的波长:
2.CCD技术
CCD(Charge-Coupled Device,电荷耦合器件)是20世纪60年代中期开始出现的新型半导体光电转换器件。自问世以来,在钢铁、冶金、机械、石油化工、航空、环保等支柱产业中得到了广泛的应用,并解决了许多技术难题。20##年诺贝尔物理学奖之一授予了美国的2名科学家维拉·博伊尔(Willard S. Boyle) 和乔治·史密斯(George E. Smith),即因为他们发明了“成像半导体电路——电荷耦合器件图像传感器CCD”。
CCD是由光敏单元、转移结构和输出结构组成的一种集光电转换、电荷储存和电荷转移为一体的光电传感器件。典型线阵CCD结构如图5所示。其中,光敏单元是CCD中注入信号电荷(光生电子)和存储信号电荷的部分;转移结构的基本单元是MOS(Metal-Oxide-Semiconductor,金属-氧化物-半导体)结构,它的作用是转移存储的信号电荷;输出结构是将信号电荷以电压或者电流的形式输出的部分。
 CCD的基本功能是电荷的存储和电荷的转移。工作时,需要在金属栅极上加一定的偏压,形成势阱以容纳信号电荷,电荷的多少与光强呈线性关系。电荷读出时,采用了一种电荷耦合(相邻两个势阱相互耦合)的方法。在一定相位关系的移位脉冲电压作用下,从一个位置移动到下一个位置,直到移至输出电极,经过电荷-电压变换,转换为模拟信号。由于在CCD中每个像元的势阱所容纳电荷的能力是有一定限制的,所以如果光照太强,一旦电荷填满势阱,电子将产生“溢出”现象。
CCD的基本功能是电荷的存储和电荷的转移。工作时,需要在金属栅极上加一定的偏压,形成势阱以容纳信号电荷,电荷的多少与光强呈线性关系。电荷读出时,采用了一种电荷耦合(相邻两个势阱相互耦合)的方法。在一定相位关系的移位脉冲电压作用下,从一个位置移动到下一个位置,直到移至输出电极,经过电荷-电压变换,转换为模拟信号。由于在CCD中每个像元的势阱所容纳电荷的能力是有一定限制的,所以如果光照太强,一旦电荷填满势阱,电子将产生“溢出”现象。
CCD图像传感器具有体积小、噪声低、分辨率高、灵敏度高、功耗小、寿命长、抗震性及抗冲击性好、不受电磁干扰、可靠性高、便于数字化处理和便于与计算机接口等诸多优点。与CMOS图像传感器相比,亦有灵敏度高、分辨率高、噪声小、技术成熟等优势。在图像传感和非接触式精密测量技术中应用广泛,例如在摄像机、数码相机和扫描仪中,以及各类物体的尺寸、距离、三维特性测量等方面。随着CCD技术和理论的不断发展,CCD技术应用的广度与深度必将越来越大。
本实验中的光强测量系统,是利用线阵CCD器件接收光谱图形和光强分布,并利用示波器对采集到的数据进行显示处理(或利用计算机的强大数据处理能力对采集到的数据进行分析处理),通过直观的方式得到我们需要的结果。
【实验仪器】
半导体激光器,扩束镜(已旋至激光器光源前),双棱镜,透镜,LM601S型CCD光强分布测量仪,示波器,2根Q9—Q9(BNC—BNC)接口连接线,二维调节架,LM05型光具座,3个二维马鞍座,1个三维马鞍座等。
CCD光强分布测量仪的核心是线阵CCD器件。CCD器件是一种可以电扫描的光电二极管列阵,有面阵(二维)和线阵(一维)之分。LM601S型CCD光强仪所用的是线阵CCD器件,性能参数如下表。机壳尺寸为150mm×100mm×50mm,CCD器件的光敏面至光强仪前面板距离为4.5mm。

LM601S型CCD光强仪后面板各插孔标记含义如下:
“同步”:Q9头,示波器型用。启动CCD器件扫描的触发脉冲,主要供示波器触发用。“同步”的含意是“同步扫描”,与示波器的触发端口相连。
“信号”:Q9头,示波器型用。CCD器件接受的空间光强分布信号的模拟电压输出端,与示波器的某一路Y信号端口相连。
【实验内容】
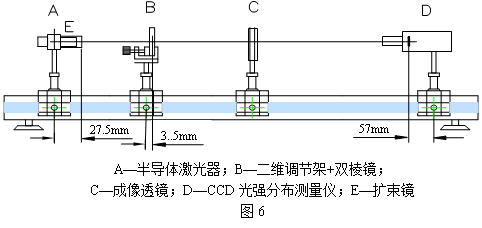
整套实验系统的安装如图6所示,具体调节步骤如下:
1.如图6所示,将半导体激光器,双棱镜(二维调节架上有两个簧片,保持双棱镜棱脊竖直将其放上二维调节架,并用这两个簧片夹紧固定),CCD光强分布测量仪放置在光具座上,先不放置透镜。用目视法调整它们的中心等高,并使它们在平行于光具座的同一直线上,而且双棱镜底边应垂直于此直线。双棱镜与CCD光强仪之间的距离应尽可能满足远场条件(L>>d,d为两虚光源的间距)。
用1根双Q9头的信号线连接示波器的信号输入端和CCD光强仪后面板上的“信号”插口;用另1根双Q9头的信号线连接示波器的同步触发端(外触发方式)和CCD光强仪后面板上的“同步”插口。
2.打开半导体激光器,调节其电源盒上的旋钮使光源亮度适中。旋转半导体激光器光阑前的扩束镜,使出射的光沿水平方向散开。精确调节激光器、二维调节架和CCD光强仪的高度,使激光束能够通过双棱镜中心,并入射到CCD光强仪前端的采光窗口(从而射到CCD线阵上)。
在调节过程中可以先在CCD光强分布测量仪前放置一白屏(白纸),用来观察干涉图样。调节激光器和二维调节架的水平调节手轮,使得白屏上的干涉条纹位于CCD光强仪中部。若条纹不清晰或倾斜,可以微调二维调节架的俯仰调节手轮。
若条纹数目过少,可增加双棱镜与光源的距离;若条纹太细密,可减少双棱镜与光源的距离。综合以上各个因素,直至能观察到10条左右的条纹,且每条条纹宽度适当,条纹清晰可数为止。
3.移去白屏,用CCD光强分布测量仪测量干涉条纹的间距△x。图7为用CCD光强仪测量的干涉曲线图。为了提高测量精度,可以测出n条(例如6条)干涉条纹的间距,再除以n - 1,即得△x。

使用示波器测量条纹间距△x,先要解决“定标”的问题,即示波器X方向上的1大格等于CCD器件上多少像元(或者等于CCD器件位置的多少距离)。方法是调节示波器的“扫描时间”和“微调”旋钮,使信号波形的一帧正好对应于示波器上的某个刻度数。如果波形一帧正好对应于示波器上的满屏10大格,则每大格对应的实际空间距离为:2700个像元÷10格×11μm = 2970μm = 2.970 mm,每小格对应的实际空间距离为:2.970mm÷5 = 0.594 mm。因不同型号的CCD光强分布测量仪采用的像元数不同,所以实验中以具体选用的CCD的型号来定标。
注意:在实验中有时干涉条纹的强度不一,即在为了CCD接收图样时不至于饱和,减小激光器功率时,有时一些条纹会不能被CCD辨别,所以在实验中也可以在干涉区边缘选取连续的相邻两个条纹,计算其间距,多选取这样的几个值,去掉相差比较大的,再计算其平均值,也可得精度较高的干涉条纹间距△x。

4.测L的值,即光源到CCD光敏面的距离。可以用米尺直接测量,也可以通过参考图6从光具座读数后推算得出。若用米尺直接测量,要加上CCD光强仪前面板至光敏面的距离4.5mm。
5.保持以上光源、双棱镜、CCD光强分布测量仪原状(实验未完,切勿变动它们之间的间距),在双棱镜和CCD光强分布测量仪之间放上成像凸透镜,如图6、图9(俯视图)所示。移动凸透镜,寻找二虚光源S1,S2经透镜后生成的像(必要时可以调节光源和二维调节架高度和水平调节手轮,,但不可变动它们之间的间距,以使二像位于CCD光强仪中部)。细心观察二像的亮度和宽度的变化,注意辨认二虚光源的真实像(图8为虚光源经透镜后的成像曲线图),利用CCD测量像的间距t′。测量图9(俯视图)中所示的a(光源到成像透镜的距离)和b(成像透镜到CCD光敏面的距离)之值。
由透镜成像放大公式得:两虚光源之间的间距
则可算出干涉光源的波长:
仪器使用和调节中有几点需要注意:
(1)LM601S型CCD光强分布测量仪有很高的光电灵敏度,在一般室内光照条件下已趋饱和,在示波器上显示出的采集曲线为全高。在没有暗室的情况下,可以在CCD光强仪和二维调节架之间架设一个遮光筒(例如两端开口的封闭纸盒)。
(2)如果采集到的曲线出现了“削顶”,则有可能是CCD器件饱和,说明信号光过强(注意:不是环境光过强),这时可以减小激光器的功率。
(3)调节干涉条纹中心与CCD中心一致。实验中为了使CCD发挥最佳效率,减小实验误差,需仔细调节干涉条纹中心与CCD光敏元中心一致,应尽量使干涉条纹集中到CCD光敏区的中央位置;当CCD饱和了再降低激光器的功率,仔细调节使得激光器的功率小但CCD的相对光强为最大,即此时干涉条纹中心与CCD光敏元的中心基本吻合。
(4)一般的干涉条纹是一种对称图形。但有时采集到的图形左右不对称,这主要是各光学元件的几何关系没有调好引起的。
(5)如果光强曲线幅值涨落或突跳,是激光器输出功率不稳造成的,常发生在用He-Ne激光器时(He-Ne激光器的稳定时间较长,一般开机后半小时即可稳定),如采用半导体激光器就不会有这种情况或只有轻微的跳动。
【数据记录与处理】
1.计算条纹间距(“-”表示示波器中心以左的读数,“+”表示中心以右的读数)
因为在定标时需要将波形一帧占满示波器上的满屏10大格,所以会使得干涉条纹的间距就变得非常的小,若直接读数引起的误差会较大。为提高精度,建议读数时,在调好示波器的“扫描时间”和“微调”旋钮使波形一帧占满示波器上的满屏10大格的情况下,按下“扫描时间”旋钮旁的“×10”按钮。

2.测量两虚光源经透镜后的像间距离,计算两虚光源间距离(注意辨认虚实)
两虚光源经透镜成像后像间距离:
计算两虚光源间的距离:
3.计算实验中半导体激光器的光波波长

(半导体激光器的参考波长为650nm)
【思考题】
1.实验中放置双棱镜时,在保持棱脊竖直的前提下,棱脊一侧可以朝向光源,也可以朝向CCD光强仪,是否都可以看见干涉条纹?为什么?
2.在调节干涉条纹时,若条纹过于细密,应该如何调节?为什么?
3.CCD的基本结构是怎样的?每部分的作用是什么?
第二篇:大物实验——双棱镜干涉实验(七)
双棱镜干涉实验(七)
两束光波产生干涉的必要条件是:
1、频率相同
2、振动方向相同
3、位相差恒定
尽管干涉现象是多种多样的,但为满足上述相干条件,总是把由同一光源发出的光分为两束或两束以上的相干光,使它们各经不同的路径后再次相遇而产生干涉。产生相干光的方式有两种:分波阵面法和分振幅法。本次的菲涅耳双棱镜干涉属于分波阵面法。
实验目的:
1、掌握菲涅尔双棱镜获得双光干涉的方法;
2、验证光的波动性,了解分波阵面法获得相干光的原理;
3、通过用菲涅耳双棱镜对钠灯波长的测量,掌握光学测量的一些基本技巧,培养动手能力。
实验仪器:
单导体激光器,钠光源,扩束镜,双棱镜,二维调节架,透镜,测微目镜,测量显微镜,白炽光,光具座
实验原理:
菲涅耳双棱镜(简称双棱镜)实际上是一个顶角极大的等腰三棱镜,如图1所示。它可看成由两个楔角很小的直角三棱镜所组成,故名双棱镜。当一个单色缝光源垂直入射时,通过上半个棱镜的光束向下偏折,通过下半个棱镜的光束向上偏折,相当于形成S′1和S′2两个虚光源。与杨氏实验中的两个小孔形成的干涉一样,把观察屏放在两光束的交叠区,就可看到干涉条纹。

其中,d是两虚光源的间距,D是光源到观察屏的距离,λ是光的波长。用测微目镜的分划板作为观察屏,就可直接从该测微目镜中读出条纹间距△x值,D为几十厘米,可直接量出,因而只要设法测出d,即可从上式算出光的波长λ,即
△x=Dλ/d , λ =△xd/D  (1)
(1)
测量d的方法很多,其中之一是“二次成像法”,如图2所示,即在双棱镜与测微目镜之间加入一个焦距为f的凸透镜L,当D>4f 时,可移动透镜L而在测微目镜中看到两虚光源的缩小像或放大像。分别读出两虚光源像的间距d1和d2,则由几何光学可知:
d= (2)
(2)

实验装置
光具座,双棱镜,测微目镜,钠光源,可调狭缝
测微目镜是用来测量微小实像线度的仪器,其结构如图3所示,在目镜焦平面附近,的一块量程为8mm的刻线玻璃标尺,其分度值为1mm(如图3(b)中的8条短线所示)在该尺后0.1mm处,平行地放置了一块分划板,分划板由薄玻璃片制成,其上刻有十字准线和一对双线,人眼贴近目镜筒观察时,可同时看到这块分划板和玻璃标尺的刻线,如图3(b)所示,分划板的框架与读数鼓轮相连,当读数鼓轮旋转时,分划板会左右移动:鼓轮每转一圈(100小格),分划板移动1mm(即每小格0.01mm),测量微小实像时,先调节目镜与分划板间的距离,使能清晰地观察到分划板上的准线;然后调节测微目镜与待测实像的距离使实像也清晰并与准线无视差;以后旋转鼓轮使准线对准待测像的一边,读下此时玻璃标尺的读数和鼓轮读数;再旋转鼓轮使准线对准待测像的另一边,读下玻璃标尺的读数和鼓轮读数;最后把前后两次读数相减,即得待测像的长度。
测微目镜的不确定度值为0.004mm,测量时应注意鼓轮必须同一方向旋转,中途不要倒退,以避免螺距误差。
实验内容和步骤
1、调节各元件等高共轴
(1)调整狭缝与凸透镜等高共轴
将狭缝紧贴钠灯放在光具座上,接着依次放上透镜(f≈20cm)和白屏,用二次成像法使狭缝与透镜等高共轴。
(2)调整测微目镜、狭缝和透镜等高共轴
用测微目镜取代白屏,并置于距狭缝80cm位置上,进一步用二次成像法调至测微目镜叉丝与狭缝、透镜等高共轴。
(3)调整双棱镜与其他元件共轴
在狭缝与透镜之间放上双棱镜,使双棱镜到狭缝的距离约20cm,上下左右移动双棱镜并转动狭缝,直至在测微目镜中观察到等长并列(表示棱脊平行于狭缝)、等亮度(表示棱脊通过透镜光轴)的两条狭缝缩小像。
2、干涉条纹的调整
要通过测微目镜看到清晰的干涉条纹,实验中必须满足两个条件:1狭缝宽度足够窄,以使缝宽上相应各点为相干光,具有良好的条纹视见度。但狭缝不能过窄,过窄光强太弱,同样无法观察到干涉条纹。2棱镜的脊背反射形成的虚狭缝必须与狭缝的取向相互平行,否则缝的上下相应各点光源的干涉条纹互相错位叠加,降低条纹视见度,也无法观察到干涉条纹。
调整方法如下:在上述各光学元件调整的基础上,移去透镜,进一步交替微调狭缝宽度和狭缝取向,反复若干次,直至通过测微目镜看到最清晰的干涉条纹为止。
注意事项:
(1)测微目镜中十字叉丝移动的方向应与被测物线度方向平行,即竖线与之垂直。
(2)为消除鼓轮的丝杆螺纹与螺母之间存在间隙以及鼓轮空转所引起的系统误差,测量应缓慢朝一个方向转动鼓轮,中途不可逆转。
(3)转动鼓轮观测十字叉丝的位置时,不要移出其观测范围(0~10mm)。
(4)不要用手触摸任何镜头。

-
电子技术应用实验报告
电子技术应用实验报告一实验项目四人智力竞赛抢答器要求1每个参赛者控制一个按钮用按动按钮发出抢答信号2竞赛主持人另有一个开关用于将电…
-
电子技术实验教程实验五
实验五场效应管放大器系别姓名学号实验日期一实验目的1学习场效应管放大电路设计和调试方法2掌握场效应管基本放大电路的设计及调整测试方…
-
电子技术应用实验实验报告—抢答器
电子技术应用实验实验报告八一实验项目名称4人智力竞赛抢答器实验内容设计并实现一个4人智力竞赛用抢答器电路具体要求为1每个参赛者控制…
-
模拟电子技术基础实验教程
模拟电子技术基础实验教程教材内容依照教学规律按照由浅入深循序暂进的学习和能力培养原则分层次安排实验内容后一层次的内容以前一层次为基…
-
电子技术实验报告(二极管应用电路)
实验报告二课程名称电子技术实验项目二极管应用电路专业班级姓名座号09实验地点仿真室实验时间指导老师成绩一实验目的1通过二极管的伏安…
-
继续教育和提升学历工作总结(09-10)
继续教育和提升学历工作总结(20xx---20xx学年度)下伍旗中心小学继续教育和提升学历工作总结(20xx---20xx学年度)…
-
党员干部工作总结
学校党员干部工作总结党支部在中心校的正确领导下,以先进性教育为主体,狠抓班子队伍建设,党员干部整体素质不断提高,团结协作能力不断加…
-
专业技能训练总结
《统计学原理》课程训练(一)单项选择题1.研究某企业生产设备使用情况,那么统计总体是A.该企业全部车间B.该企业每台生产设备C.该…
-
大一个人总结
在高中时,经常听到师兄师姐们说大学很好玩,很轻松,时间过得很快。确实,时间是过的很快,但是却不轻松。转眼间来到大学已经快一年了,在…
-
专业技能训练总结
河北科技师范学院专业技能训练总结学生:张超越学号:9311070126专业:电气工程及其自动化机电科学与工程系20xx年x月1专业…