南昌大学电力系统分析实验报告2
南昌大学实验报告
学生姓名: 学号: 专业班级:
实验类型:□ 验证 □ 综合 ■ 设计 □ 创新 实验日期: 12.7 实验成绩:
一、实验项目名称
电力系统短路计算实验
二、实验目的与要求:
目的:通过实验教学加深学生的基本概念,掌握电力系统的特点,使学生通过系统进行物理模拟和数学模拟,对系统进行电力系统计算和仿真实验,以达到理论联系实际的效果。通过电子计算机对电力系统短路等计算的数学模拟,分析电力系统的故障计算方法、实现工程计算的功能。提高处理电力系统工程计算问题的实际能力,以及实现对电力系统仿真的过程分析。
要求:
l、 使学生掌握对电力系统进行计算、仿真试验的方法,了解实验对电力系统分析研究的必要性和意义。
2、使学生掌握使用实验设备计算机和相关计算软件、编程语言。
3、应用电子计算机完成电力系统的短路计算。
4、应用电子计算机及相关软件对电力系统进行仿真。
三、主要仪器设备及耗材
1.每组计算机1台、相关计算软件1套
四、实验步骤
1. 将事先编制好的形成电力网数学模型的计算程序原代码由自备移动存储设备导入计算机。
2. 在相应的编程环境下对程序进行组织调试。
3. 应用计算例题验证程序的计算效果。
4. 对调试正确的计算程序进行存储、打印。
5. 完成本次实验的实验报告。
五、实验数据及处理结果
运行自行设计的程序,把结果与例题的计算结果相比较,验证所采用的短路电流计算方法及程序运行的正确性。如果采用的是近似计算方法,还需分析由于近似所产生的误差是否在运行范围内。
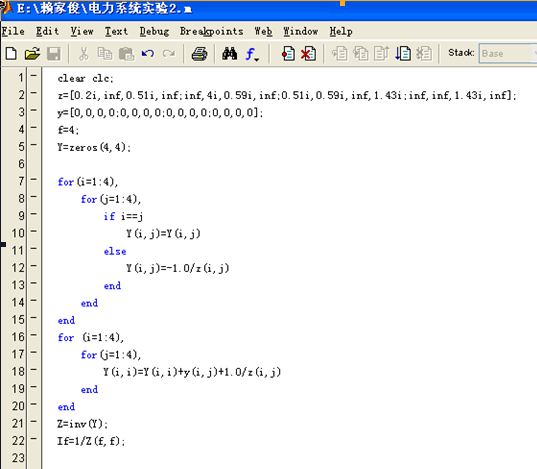
实验程序:
clear clc;
z=[0.2i,inf,0.51i,inf;
inf,4i,0.59i,inf;
0.51i,0.59i,inf,1.43i;
inf,inf,1.43i,inf];
y=[0,0,0,0;
0,0,0,0;
0,0,0,0;
0,0,0,0];
f=4;
Y=zeros(4,4);
for(i=1:4),
for(j=1:4),
if i==j
Y(i,j)=Y(i,j)
else
Y(i,j)=-1.0/z(i,j)
end
end
end
for (i=1:4),
for(j=1:4),
Y(i,i)=Y(i,i)+y(i,j)+1.0/z(i,j)
end
end
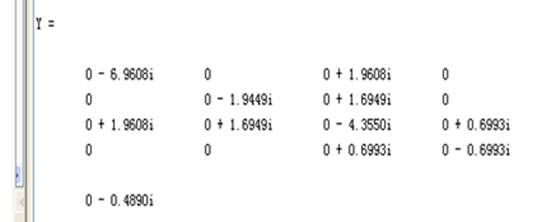
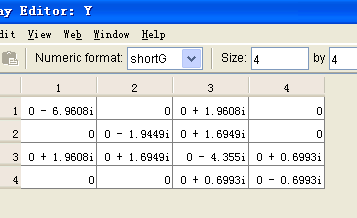
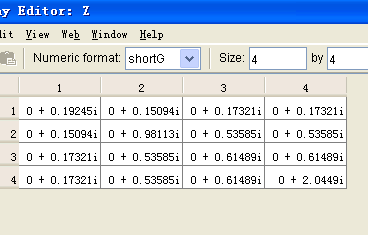
Z=inv(Y);
If=1/Z(f,f);
disp(If);
实验结果:If=0-0.48902i 
 实验例题所给结果短路电流:If = - j0.4895,与程序运行结果在误差允许范围之内,故验证了该程序的正确性。
实验例题所给结果短路电流:If = - j0.4895,与程序运行结果在误差允许范围之内,故验证了该程序的正确性。
六、思考讨论题或体会或对改进实验的建议
1. 理解课本上讲述的同步电机突然三相短路的物理分析。
答:同步电机稳态对称运行(包括稳态对称短路)时,电枢磁势大小不随时间变化,而在空间以同步速旋转,同转子没有相对运动,故不会在转子绕组中感应电流。突然短路时,定子电流发生急剧的变化,电枢反应磁通也随着变化,定转子间电流会相互影响,这是同步电机突然短路暂态过程区别于稳态短路的显著特点。我们在进行磁感分析时,对于每个绕组都遵守磁链守恒原则。
对于无阻尼绕组同步电机突然三相短路时,短路后定子侧将出现:①基频电流,由三相对称绕组的基频电流产生的交变磁链,用以抵消转子主磁场对定子各相绕组产生的交变磁链;②直流 :对各绕组产生的不变
:对各绕组产生的不变 、
、 、
、 ,来维持定子绕组的磁链初值不变;③倍频电流
,来维持定子绕组的磁链初值不变;③倍频电流 :定子各相直流产生的恒定磁势
:定子各相直流产生的恒定磁势 ,当转子旋转时,因转子纵横轴磁阻不同,转子每转过
,当转子旋转时,因转子纵横轴磁阻不同,转子每转过 ,磁阻经历一个变化周期,为适应磁阻的变化,产生倍频电流与直流共同作用,才能维持定子侧磁链初值不变。
,磁阻经历一个变化周期,为适应磁阻的变化,产生倍频电流与直流共同作用,才能维持定子侧磁链初值不变。
转子侧产生:①附加直流分量 :为抵消定子电流对转子产生的强烈电枢反应影响,维持磁链不变,该附加直流与原直流同向,加强了励磁绕组的磁场,而且产生磁通的一部分也要穿过定子绕组,故激起定子基频电流大大超过稳态短路电流
:为抵消定子电流对转子产生的强烈电枢反应影响,维持磁链不变,该附加直流与原直流同向,加强了励磁绕组的磁场,而且产生磁通的一部分也要穿过定子绕组,故激起定子基频电流大大超过稳态短路电流
②转子基频交流:为抵消定子的直流和倍频电流产生的电枢反应,该基频电流在转子产生脉振磁场,分解为正反两方向磁场,又来影响定子侧的以及在定子侧产生两倍频的交变磁链,定子侧的就是为了抵消该磁链而产生的。
2. 简述无阻尼绕组同步电机突然三相短路时,短路电流所含各种分量以及各自由电流衰减时间常数的确定,有阻尼绕组同步电机突然三相短路时有什么不同之处?
答:(1)无阻尼绕组同步电机突然三相短路时,定子侧短路电流有:①基频电流 :抵消转子主磁场对定子各相绕组产生的交变磁链;②直流:维持定子绕组的磁链初值不变。③倍频电流:为适应磁阻的变化,倍频电流与直流共同作用,才能维持定子侧磁链初值不变。
:抵消转子主磁场对定子各相绕组产生的交变磁链;②直流:维持定子绕组的磁链初值不变。③倍频电流:为适应磁阻的变化,倍频电流与直流共同作用,才能维持定子侧磁链初值不变。
转子侧短路电流有:①附加直流分量:为抵消定子电流对转子产生的强烈电枢反应影响,维持磁链不变;②转子基频交流 :为抵消定子的直流和倍频电流产生的电枢反应。
:为抵消定子的直流和倍频电流产生的电枢反应。
(2)在实用计算中,各自由电流衰减常数确定,常采用以下的简化原则:①为维持磁链守恒而在短路瞬间出现的自由电流,若它产生的磁通对于本绕组相对静止,那该电流将按本绕组时间常数衰减,一切同改自由电流发生依存关系的均按同一时间常数衰减;②某绕组时间常数是该绕组电感同电阻之比,而忽略其他绕组电阻的影响。
(3)有阻尼绕组同步电机突然三相短路时的不同:有阻尼绕组电机,在转子纵轴向有励磁绕组和阻尼绕组,横轴向也有阻尼绕组。突然短路时,定子基频电流突然增大,电枢反应磁通也突然增加,励磁绕组、阻尼绕组为维持磁链守恒,都会感应出自由直流,由此来抵消电枢反应磁通的增加。转子各绕组自由直流产生磁通一部分又进入定子侧,由此定子侧会有基频电流自由分量。注意,转子纵轴向的励磁绕组和阻尼绕组间存在互感关系,突然短路瞬间它们当中任一绕组的磁链守恒都是靠两绕组的自有电流共同维持的。
3. 简述电力系统三相短路电流的实用计算的条件,应用前提及使用方法。
电力系统三相短路电流的实用计算的条件:
(1)起始次暂态电流的实用计算条件:把系统所有元件都用其次暂态参数代表,次暂态电流计算就同稳态电流计算一样,系统中所有静止元件的次暂态参数都与其稳态参数一致,而旋转电机的次暂态参数则不同于其稳态参数。
短路时,同步电机的次暂态电势 ①,实用计算中汽轮机和有阻尼绕组的凸极发电机的
①,实用计算中汽轮机和有阻尼绕组的凸极发电机的 ;对于异步电动机的
;对于异步电动机的 (
( 是异步电机起动电流的标幺值),
是异步电机起动电流的标幺值), ②。
②。
实用计算中,只对于短路点附近能显著提供短路电流的大型电动机,才按上式①②算出次暂态电抗和次暂态电势。其他电动机,则看作是系统中负荷节点的综合负荷的一部分,该综合负荷可近似用一个含次暂态电抗和次暂态电势的等值支路表示。
(2)负荷提供的冲击电流 ,式中
,式中 为负荷提供的起始次暂态电流的有效值,
为负荷提供的起始次暂态电流的有效值, 为冲击系数
为冲击系数
4. 三相短路时短路容量的标么值等于什么?
答:三相短路时短路容量标幺值 ,式中
,式中 是系统的基准容量,
是系统的基准容量, 是短路点输入电抗的标幺值。
是短路点输入电抗的标幺值。
七、实验小结
在有过上次计算电力网数学模型模拟实验后,对于怎么用MATLAB软件来求解电力网络节点导纳矩阵有了一定的基础,所以这次实验相对来说是比较轻松的。本次实验就是通过节点导纳矩阵来求解系统的短路电流的标幺值。
所以本实验也是在求出系统的导纳矩阵的基础上进行的。还过这里是先求出系统的节点阻抗矩阵,利用求解阻抗矩阵的逆矩阵来求解系统的导纳矩阵。在求出了系统的导纳矩阵之后,这是一个含有发电机支路和负荷的节点矩阵,利用节点方程YV=I可知,设发电机的电势为1,则I=1/Y可以求出短路电流。
八、参考资料
1. 《电力系统分析》 何仰赞 华中科技大学出版社
2. 《电力系统稳态分析》陈珩 中国电力出版社
3. 《电力系统暂态分析》李光琦 中国电力出版社
4. 《电力系统计算》 水利电力出版社
实验素材:
第二篇:南昌大学实验报告3
 南昌大学实验报告
南昌大学实验报告
学生姓名: 王岩 学 号: 6100308239 专业班级: 自动化084班
实验类型:□ 验证 □ 综合 ■ 设计 □ 创新 实验日期:20##-11-15 实验成绩:
实验二 三容水箱模糊控制设计
一、实验目的
1、熟悉三溶液位控制的组成原理
2、通过实验进一步掌握模糊控制原理及模糊控制规则的生成
3、掌握模糊方法及实现
二、实验设备及条件
计算机(装有MATLAB)
三、实验原理
 模糊控制是一种能够反映人类智慧的智能控制方法。模糊控制是采用人类思维中的模糊两,如“高”、“中”、“低”、“大”、“小”等,控制量是由模糊推理导出。这些 模糊量和模糊推理是人类智能活动的体现。
模糊控制是一种能够反映人类智慧的智能控制方法。模糊控制是采用人类思维中的模糊两,如“高”、“中”、“低”、“大”、“小”等,控制量是由模糊推理导出。这些 模糊量和模糊推理是人类智能活动的体现。
模糊集合是模糊控制的数学基础。
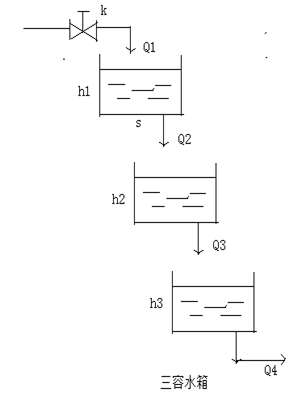
图一所示为三容水箱液位控制系统,控制目的是使下水箱液位在控制器作用下能保持恒定,并能克服来自系统内部和外部扰动的影响。三容水箱的结构图如图一,该被控对象具有非线性和时滞性,要建立精确的数学模型比较困难,模糊控制可以避开复杂的数学模型,通常还可以在非线性、大偏差下可靠的工作,具有较好的适应性和鲁棒性。
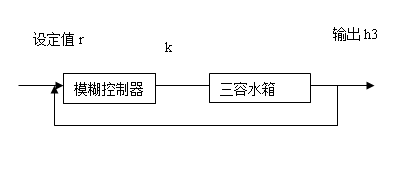 本实验的模糊控制器输入为h3的测量值,而输出为阀门开度K,根据实验的要求设计。
本实验的模糊控制器输入为h3的测量值,而输出为阀门开度K,根据实验的要求设计。
三容水箱结构框图如下:
四、实验设计过程及结果
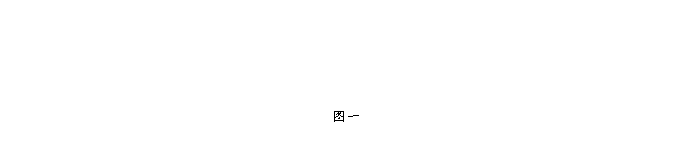
1、 三容水箱数学模型
可应用实验一建立的三容水箱数学模型
最终确定以下参数:Q1=2.2*k;
Q2=13.8*sqrt(h1);
h1=h1+(Q1-Q2)/s;
Q3=13.4*sqrt(h2);
h2=h2+(Q2-Q3)/s;
Q4=170*abs(sin(2.58*pi*i+0.45));
h3=h3+(Q3-Q4)/s;
2、 根据模糊控制器的设计规律,设计模糊控制器
1)、确定观测量和控制量
定义理想的三水箱的液位高度为100,是机车的水位高度为h3,选择液位差e=100-h3为观测量;
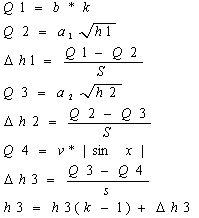
2)输入和输出量的模糊化
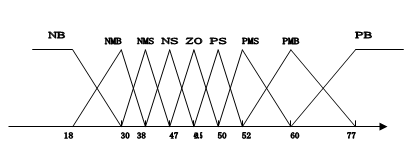
将偏差e分为九个模糊集:NB、NBM、NSM、NS、ZO、PS、PSM、PBM、PB,将输出阀门开度k分为九个等级,具体分段如下:

根据经验可得模糊控制表:

3、编写程序并调试:
clear all;
close all;
a=newfis('fuzz_tank');
a=addvar(a,'input','e',[-100,100]);
a=addmf(a,'input',1,'NB','zmf',[-100,-50]);
a=addmf(a,'input',1,'NBM','trimf',[-100,-50,-20]);
a=addmf(a,'input',1,'NSM','trimf',[-50,-20,-5]);
a=addmf(a,'input',1,'NS','trimf',[-20,-5,0]);
a=addmf(a,'input',1,'ZO','trimf',[-5,0,5]);
a=addmf(a,'input',1,'PS','trimf',[0,5,20]);
a=addmf(a,'input',1,'PSM','trimf',[5,20,50]);
a=addmf(a,'input',1,'PBM','trimf',[20,50,100]);
a=addmf(a,'input',1,'PB','smf',[50,100]);
a=addvar(a,'output','u',[18,77]);
a=addmf(a,'output',1,'NB','zmf',[18,30]);
a=addmf(a,'output',1,'NBM','trimf',[18,30,38]);
a=addmf(a,'output',1,'NSM','trimf',[30,38,47]);
a=addmf(a,'output',1,'NS','trimf',[38,47,49.5]);
a=addmf(a,'output',1,'ZO','trimf',[47,49.5,50]);
a=addmf(a,'output',1,'PS','trimf',[49.5,50,52]);
a=addmf(a,'output',1,'PSM','trimf',[50,52,60]);
a=addmf(a,'output',1,'PBM','trimf',[52,60,77]);
a=addmf(a,'output',1,'PB','smf',[60,77]);
rulelist=[1 1 1 1 ;
2 2 1 1;
3 3 1 1;
4 4 1 1;
5 5 1 1;
6 6 1 1;
7 7 1 1;
8 8 1 1;
9 9 1 1];
a=addrule(a,rulelist);
a1=setfis(a,'defuzzmethod','mom');
writefis(a1,'tank');
a=readfis('tank');
ts=1;
h1=30;
h2=40;
h3=30;%液位初始化
s=120;
h=100;
e=0;
e_1=0;
for i=1:10000
e=h-h3;
time(i)=ts*i;
k=evalfis([e],a);
if h1>=180|h2>=200|h3>=150
k=10;
end
if h1<=22|h2<22|h3<=22
k=90;
end
Q1=2.2*k;
Q2=13.8*sqrt(h1);
h1=h1+(Q1-Q2)/s;
Q3=13.4*sqrt(h2);
h2=h2+(Q2-Q3)/s;
Q4=170*abs(sin(2.58*pi*i+0.45));
h3=h3+(Q3-Q4)/s;
L3(i)=h3;
L2(i)=h2;
L1(i)=h1;
end
figure(1);
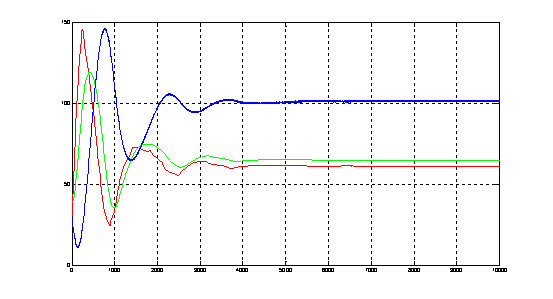
plot(time,L1,'r',time,L2,'g',time,L3,'b');grid
 4、实验结果及分析:
4、实验结果及分析:
红色——h1
绿色——h2
蓝色——h3
如上图所示,曲线最终接近设定值100,在设定值附近达到稳定,满足控制要求。
当调整三水箱的初始液位,基本满足控制要求。
相关改变数据参数的实验程序及结果不在此列出。
五、实验总结
经过本次实验,总结如下几点:
1、熟悉掌握了matlab 程序的编写
2、了解智能控制中模糊控制的基本思路,并应用于实践
3、在调试过程中,熟悉了调试的方法,根据结果分析如何设置调整参数
要有足够的耐心,实验不是一蹴而就的。
-
电力系统自动化实验报告
学院专业班级学号姓名指导老师完成时间电力系统自动化报告核技术与自动化学院电气工程及其自动化20xx060505班320xx0605…
-
电力系统实验报告
电力系统实验报告班级学号姓名实验一同步发电机准同期并列实验一实验目的1加深理解同步发电机准同期并列原理掌握准同期并列条件2掌握微机…
-
电力系统实验报告
单机无穷大系统稳态实验一整理实验数据说明单回路送电和双回路送电对电力系统稳定运行的影响并对实验结果进行理论分析实验数据如下由实验数…
-
电力系统实验报告
重庆邮电大学移通学院自动化系电力系统自动化及其微机保护实验专业电气工程及其自动化班级05111001学号0511100104姓名刘…
-
电力系统分析实验报告
电力系统分析实验报告实验项目1单机无穷大系统稳态运行实验2电力系统暂态稳定实验学院电气信息学院专业电气工程及其自动化班级20xx级…
-
电力系统自动化实验报告
电力系统自动化实验报告学院核技术与自动化工程学院专业电气工程及其自动化班级电气工程及其自动化1班学号姓名指导老师顾民完成时间20x…
-
电力系统实验报告
电力系统实验报告班级学号姓名实验一同步发电机准同期并列实验一实验目的1加深理解同步发电机准同期并列原理掌握准同期并列条件2掌握微机…
-
南昌大学电力系统分析实验报告2
南昌大学实验报告学生姓名李开卷学号6100312199专业班级电力系统124班实验类型验证综合设计创新实验日期125实验成绩一实验…
-
南昌大学电力系统分析实验报告2
南昌大学实验报告学生姓名学号专业班级实验类型验证综合设计创新实验日期127实验成绩一实验项目名称电力系统短路计算实验二实验目的与要…
-
电力系统分析实验报告
电力系统分析理论实验报告一单机无穷大系统稳态运行实验一实验目的1了解和掌握对称稳定情况下输电系统的各种运行状态与运行参数的数值变化…
- 中南大学报告封面1