智能控制实验模板
实验一 FIS编辑器的使用
班级自动化2班 姓名 郝光鹏 学号 20124460231 成绩
一、实验目的
1 熟悉FIS编辑器界面;
2 会用FIS编辑器编辑隶属函数;
3 会用FIS编辑器编辑模糊规则。
二、实验原理
运用MATLAB模糊工具箱编辑模糊控制系统的隶属函数和控制规则。
三、实验步骤
1、 打开MATLAB,在命令窗口输入fuzzy命令,按回车进入FIS编辑器;
2、 熟悉FIS编辑器的菜单;
3、 编辑输入量和输出量;
4、 编辑输入量的隶属函数;
5、 编辑输出量的隶属函数;
6、 编辑模糊控制规则;
7、 保存编辑内容(路径为C:\****kzh.fis);
8、 观察效果。
四、实验结果
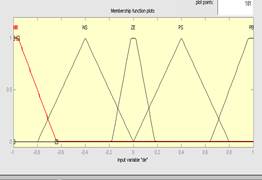
1、 输入输出量的隶属函数


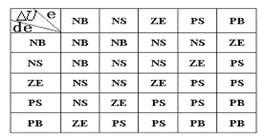
2、 模糊控制规则(如上表)
3、 曲面观察器

4直观控制规则图

5实验心得
实验过程中培养了我在实践中研究问题,分析问题和解决问题的能力以及培养了良好的工程素质和科学道德,例如团队精神、交流能力、独立思考、测试前沿信息的捕获能力等;提高了自己动手能力,培养理论联系实际的作风,增强创新意识。
实验二模糊控制系统的设计
班级自动化2班 姓名 郝光鹏 学号 20124460231 成绩
一、实验目的
1 掌握模糊控制器设计的方法与步骤
2 能调试模糊控制系统
二、实验原理
运用MATLAB模糊工具箱设计模糊控制器
三、实验步骤
a)应用SIMULINK建立直流电机模型(如下图所示)

b) 应用FIS编辑器的编辑模糊控制器
模糊控制规则表

c) 建立直流电机模糊控制系统(如下图)
 d)调试直流电机模糊控制系统
d)调试直流电机模糊控制系统
e) 观察实验效果
四、实验结果(给出阶跃响应曲线)
传统PID仿真图

模糊控制下仿真图
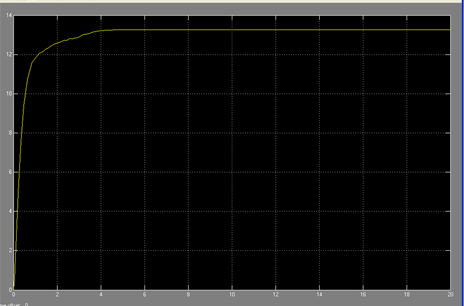
阶跃输入为50时的响应曲线
实验总结:由以上两幅图可以得出,模糊控制明显要比传统的PID控制效果要更加稳定。在这次实验中,我学到很多东西,加强了我的动手能力,并且培养了我的独立思考能力。特别是在做实验报告时,因为在做数据处理时出现很多问题,如果不解决的话,将会很难的继续下去。
实验三模糊控制的应用
班级自动化2班姓名 郝光鹏学号 2012446023成绩 一、实验目的
3 掌握模糊控制系统设计的方法与步骤
4 能进行模糊控制系统的仿真
二、实验原理
运用Simulink建模及MATLAB模糊工具箱设计模糊控制仿真系统
三、实验步骤
模糊控制在双容水箱的应用
1模糊控制器的设计
① 输入输出变量的确立
将偏差e和偏差变化率de作为模糊控制器的输入,PID控制器的三个参数Kp、Ki、Kd作为输出。
② 输入输出变量的模糊语言描述
规定输入变量e和de的论域为:e,de=(3,一2,一l,0,1,2,3),它们的模糊子集为:e,de={NB,NM,NS,ZO,PS,PM,PB},其含义依次为负大、负中、负小、零、正小、正中、正大。
规定输出变量Kp、Ki 、Kd的论域为:Kp, Ki,Kd={0,1,2,3),它们的模糊子集为:Kp,Ki,Kd={ZO,PS,PM,PB},其含义依次为零、正小、正中、正大。
③ 输入输出变量的隶属函数曲线分别如下图

④ Kp、Ki、Kd模糊控制规则表(表1)

2 在SIMULINK窗口中建立仿真模型
整体控制系统仿真模型如图

3 仿结果:

如果被控对象取时变或非线性的传函模型,那么通过仿真对比可以看出:模糊PID控制器的控制作用是远远优于常规PID控制器的。
第二篇:智能控制实验指导书
《智能控制技术》
实 验 指 导 书
韦 中 利 编 写
适用专业: 自 动 化
电气工程及其自动化
江苏科技大学电子信息学院
2011 年 3 月
前 言
智能控制课程是自动化、电气工程及其自动化等专业的主要技术基础课。主要是通过本课程的学习,使学生了解智能控制的基本理论、智能控制系统的分析方法和工程应用,了解智能控制发展前沿动态等。
为了使学生更好地理解和深刻地把握这些知识,并在此基础上训练和培养学生使用MATLAB的能力以及进行系统仿真的设计技能,设置了“模糊控制与传统PID控制的性能比较”以及“神经元自适应PID控制仿真研究”2个实验项目,2个皆为综合性实验。
模糊控制与传统PID控制的性能比较实验,主要通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。
神经元自适应PID控制仿真研究实验,主要是通过本实验的学习,使学生了解传统PID控制、神经元自适应控制等基本知识,掌握传统PID控制器设计、掌握基于二次型性能指标学习算法的单神经元自适应PID控制等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续神经网络控制理论的研究以及控制仿真等学习奠定基础。
实验一:模糊控制与传统PID控制的性能比较
实验学时:2
实验类型:设计
实验要求:必修
一、实验目的
通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。
二、实验内容
本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。
通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。这里,我们假设系统为:H(s)=20e0.02s/(1.6s2+4.4s+1)
控制执行机构具有0.07的死区和0.7的饱和区,取样时间间隔T=0.01。
设计系统的模糊控制,并与传统的PID控制的性能进行比较。
三、实验原理、方法和手段
1.实验原理:
1)对典型二阶环节,根据传统PID控制,设计PID控制器,选择合适的PID控制器参数kp、ki、kd;
2)根据模糊控制规则,编写模糊控制器。
2.实验方法和手段:
1)在PID控制仿真中,经过仔细选择,我们取kp=5,ki=0.1,kd=0.001;
2)在模糊控制仿真中,我们取ke=60,ki=0.01,kd=2.5,ku=0.8;
3)模糊控制器的输出为:u= ku×fuzzy(ke×e, kd×e’)-ki×∫edt
其中积分项用于消除控制系统的稳态误差。
4)模糊控制规则如表1-1所示:
在MATLAB程序中,Nd用于表示系统的纯延迟(Nd=td/T),umin用于表示控制的死区电平,umax用于表示饱和电平。当Nd=0时,表示系统不存在纯延迟。
5)根据上述给定内容,编写PID控制器、模糊控制器的MATLAB仿真程序,并记录仿真结果,对结果进行分析。
表1-1 FC的模糊推理规则表

四、实验组织运行要求
根据本实验的综合性、设计性特点以及要求学生自主设计MATLAB仿真程序的要求以及我们实验室的具体实验条件,本实验采用以学生自主训练为主的开放模式组织教学。
五、实验条件
1.装有MATLAB6.5的计算机;
2.智能控制技术教材;
3.模糊控制教材;
4.智能控制技术实验指导书。
六、实验步骤
1.学生熟悉实验内容,并根据实验内容、实验要求,查阅、学习相关知识;
2.设计典型二阶环节的PID控制器以及模糊控制器;
3.编写MATLAB仿真程序
4.上机调试程序,修改程序修改控制器的参数等;
5.对实验程序仿真,并记录仿真结果;
6.对实验结果进行分析,书写实验报告书。
七、思考题
1.模糊控制器的控制性能是否一定优于传统PID控制器?
2.如果选用模糊控制工具箱,如何进行设计、仿真?
八、实验报告
实验报告书应包括以下内容
1.实验预习内容:
对本次实验进行认真的预习,并写好预习报告,在预习报告中要写出实验目的、要求,需要用到的仪器设备、物品资料以及简要的实验步骤,形成一个操作提纲;
写出模糊控制器传统PID控制器的设计过程,写出MATLAB实验程序的编写。
2.实验记录内容:
开始实验时,应该将记录本放在近旁,将实验中所做的每一步操作、观察到的现象和所测得的数据及相关条件如实地记录下来;
写出实验调试以及参数修改的过程,并记录实验结果的变化以及最终的仿真结果。
3.实验报告部分:
使用现行的“实验报告簿”书写实验报告;
主要内容包括对实验数据、实验中的特殊现象、实验操作的成败、实验的关键点等内容进行整理、解释、分析总结,回答思考题,提出实验结论或提出自己的看法等。
注:以上3部分内容应在同一个实验报告书中完成。
九、其它说明
注意实验预习部分,做好实验的预习准备工作,也可先到实验室向相关教师咨询探讨实验的开发设计。
实验二:神经元自适应PID控制仿真研究
实验学时:2
实验类型:设计
实验要求:必修
一、实验目的
通过本实验的学习,使学生了解传统PID控制、神经元自适应控制等基本知识,掌握传统PID控制器设计、掌握基于二次型性能指标学习算法的单神经元自适应PID控制等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续神经网络控制理论的研究以及控制仿真等学习奠定基础。
二、实验内容
本实验主要是学习应用最优二次型性能指标学习算法进行控制器的设计仿真研究。主要涉及自控原理、计算机仿真、智能控制、神经网络控制等知识,综合性较强。
设被控对象过程模型为:yout(k)=0.368yout(k-1)+0.264yout(k-2)+u(k-d)+0.632u(k-d-1)+ξ(k)
应用最优二次型性能指标学习算法进行仿真研究,最后要求得出神经元自适应PID跟踪及中权值变化结果。
三、实验原理、方法和手段
1.实验原理:
在最优控制理论中,采用二次型性能指标来计算控制律可以得到所期望的优化效果。在神经元学习算法中,也可借助最优控制中二次型性能指标的思想,在加权系数的调整中引入二次型性能指标,使输出误差和控制增量加权平方和为最小来调整加权系数,从而间接实现对输出误差和控制增量加权平方和为最小来调整加权系数,从而间接实现对输出误差和控制增量加权的约束控制。
设性能指标为:
式中, 分别为输出误差和控制增量的加权系数,
分别为输出误差和控制增量的加权系数, 和
和 为
为 时刻参考输入和输出。
时刻参考输入和输出。
神经元的输出为: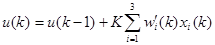








2.实验方法和手段:
1) 应用最优二次型性能指标学习算法进行仿真研究,ξ(k)为在100个采样时间的外加干扰,ξ(100)=0.10,输入为阶跃响应信号rin(k)=1.0;
2) 启动时采用开环控制,取u=0.1726,K=0.02,P=2,Q=1,d=6;
3) 比例、积分、微分三部分加权系数学习速率分别取ηI=4,ηP=120,ηD=159,ω1(0)=0.34,ω2(0)=0.32,ω3(0)=0.33;
4)利用MATLAB编写仿真程序,得出神经元自适应PID跟踪及中权值变化结果。
四、实验组织运行要求
根据本实验的综合性、设计性特点以及要求学生自主设计MATLAB仿真程序的要求以及我们实验室的具体实验条件,本实验采用以学生自主训练为主的开放模式组织教学。
五、实验条件
1.装有MATLAB6.5的计算机;
2.智能控制技术教材;
3.神经网络控制教材;
4.智能控制技术实验指导书。
六、实验步骤
1.学生熟悉实验内容,并根据实验内容、实验要求,查阅、学习相关知识;
2.设计应用最优二次型性能指标学习算法进行仿真研究的单神经元自适应PID控制器;
3.编写MATLAB仿真程序;
4.上机调试程序,修改程序、修改控制器的参数等;
5.对实验程序仿真,并记录仿真结果;
6.对实验结果进行分析,书写实验报告书。
七、思考题
如果选用神经网络工具箱进行仿真,结果如何?如何进行仿真?
八、实验报告
实验报告书应包括以下内容
1.实验预习内容:
对本次实验进行认真的预习,并写好预习报告,在预习报告中要写出实验目的、要求,需要用到的仪器设备、物品资料以及简要的实验步骤,形成一个操作提纲;
写出应用最优二次型性能指标学习算法进行仿真研究的设计过程,写出MATLAB实验程序的编写。
2.实验记录内容:
开始实验时,应该将记录本放在近旁,将实验中所做的每一步操作、观察到的现象和所测得的数据及相关条件如实地记录下来;
写出实验调试以及参数修改的过程,并记录实验结果的变化以及最终的仿真结果。
3.实验报告部分:
使用现行的“实验报告簿”书写实验报告;
主要内容包括对实验数据、实验中的特殊现象、实验操作的成败、实验的关键点等内容进行整理、解释、分析总结,回答思考题,提出实验结论或提出自己的看法等。
注:以上3部分内容应在同一个实验报告中完成。
九、其它说明
注意实验预习部分,做好实验的预习准备工作,也可先到实验室向相关教师咨询探讨实验的开发设计。
- 智能控制实验报告
-
智能控制实验报告
智能控制实验报告数字PID及其算法戴子文20xx30580307房柳煌20xx30580309张荣春20xx30580331指导老…
-
智能控制实验报告
智能控制实验单神经元自适应PID控制一实验目的1熟悉单神经元PID控制器的原理2通过实验进一步掌握有监督的Hebb学习规则及其算法…
-
智能控制实验报告
1掌握MATLAB软件中的模糊工具箱的使用2掌握模糊控制器设计的步骤和要点二实验内容本实验设计一个含有模糊控制器的控制系统并对该系…
-
智能控制技术实验报告
智能控制技术实验报告书学院专业学号姓名实验一模糊控制与传统PID控制的性能比较一实验目的通过本实验的学习使学生了解传统PID控制模…
-
计算机控制实验报告
计算机控制系统实验报告姓名罗才宝学号0953505008指导教师专业年级所在院系完成日期实验一DA数模转换实验一实验目的1掌握数模…
-
人工智能实验报告
人工智能第二次实验报告一实验题目遗传算法的设计与实现二实验目的通过人工智能课程的学习熟悉遗传算法的简单应用三实验内容用遗传算法求解…
-
人工智能实验报告
人工智能实验报告实验名称模糊方法实现电热箱的闭环控制实验模糊逻辑控制FuzzyLogicControl简称模糊控制FuzzyCon…
-
人工智能实验报告
人工智能实验报告ArtificialIntelligence老师刘丽珏班级物联网1201学号0909120xx5姓名钱晓雪日期20…
-
智能控制技术实验报告
智能控制技术实验报告书学院专业学号姓名实验一模糊控制与传统PID控制的性能比较一实验目的通过本实验的学习使学生了解传统PID控制模…