交通灯控制器设计报告
大学
课程设计报告
课程名称 __单片机原理课程设计_
题目名称 _ 交通灯控制器
学生学院 ___ 学院_____
专业班级 ___
学 号
学生姓名 __ _____
指导教师 __ __
2014 年 6 月 5 日
课程设计任务书
(指导教师填写)
课程设计名称 单片机原理 学生姓名 专业班级 自动化
设计题目 交通灯控制器设计
一、课程设计目的
1. 培养学生文献检索的能力,如何利用Internet检索需要的文献资料。
2. 培养学生综合分析问题、发现问题和解决问题的能力。
3. 培养学生综合运用知识的能力和工程设计的能力。
4. 培养学生理论联系实际的能力。
5. 提高学生课程设计报告撰写水平。
二、设计内容、技术条件和要求
1设计内容
交通灯控制器设计主要功能是用单片机控制LED灯模拟指示。模拟东西南北方向的十字路口交通灯信号控制情况。以89C51单片机为核心芯片,采用中断方式实现控制。
(1)数码管选用2位共阴极显示的数码管,共4个;
(2)东西通行时间为80s,南北通行时间为60s,缓冲时间为3s;
2 设计要求
? 设计单片机最小系统(包括复位按钮、晶振电路等);
? 绘制实现本设计内容的硬件电路(原理图),系统的组成框图。
? 相应的控制状态表;
? 编写本课程设计内容的软件设计(包含程序流程图和对程序注释)。
? 硬件实验部分可选用实验箱测试或Proteus仿真软件实现。
3 总体设计思想(供参考)
? 利用定时器T0产生每10ms一次的中断,每100次中断为1s;
? 对两个方向分别显示红、绿、黄灯的剩余时间即可;
? 用MAX7219芯片实现共阴极显示驱动;
? A方向的红灯时间=方向的绿灯时间+黄灯缓冲时间。
4 设计参考
交通灯控制器设计有电源电路、单片机主控电路、显示电路、信号灯电路等组成,如图1所示:
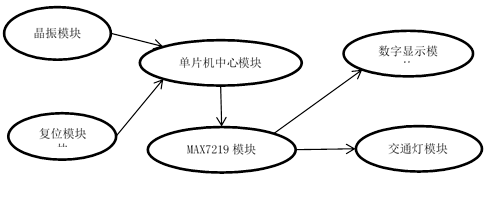
5 知识点准备:
? +5V电源原理及设计;
? MAX7219工作原理;
? 单片机复位电路工作原理及设计(元件选择的依据);
? 单片机晶振电路工作原理及设计(元件选择的依据);
? 数码管显示特性、驱动设计及应用;
? LM1602液晶显示屏特性、驱动设计及应用;
? 89C51单片机引脚资源、引脚分配等;
? 单片机汇编语言及程序设计(中断、延时子程序的设计)。
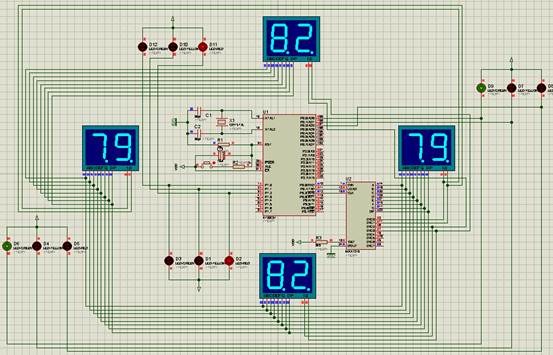
图1 交通灯控制器设计框图
三 时间进度安排
按教学计划规定,单片机原理课程设计总学时为1周,其进度安排和时间大致分配如下:
1. 十五周周一至周二 查阅资料、进行软、硬件初步设计;
2. 十五周周三至周四 上机调试,发现问题,解决问题,完善课程设计;
3. 十五周周五 总结设计过程,编写课程设计报告书。
四 主要参考文献
1、何立民. 单片机高级教程. 第1版.北京:北京航空航天大学出版社,2001
2、徐爱钧 KEIL Cx V7.0单片机高级语言编程与uVision2应用实践,北京,电子工业出版社,2004
3、李全利、仲伟峰、徐军,单片机原理及应用,北京:清华大学出版社,2006
五、设计分组及选题安排
自动化班所有学生。
指导教师签字:
20##年05月30日
单片机课程设计报告
一、设计项目简介
功能:交通灯控制器,通过单片机控制交通灯和数码管,实现4路口交通灯的正确亮灭,并能显示发亮交通灯发亮状态的剩余时间。东西通行时间为80s,南北通行时间为60s,缓冲时间为3s。
类似产品简介:
基于数字电子技术设计的交通灯控制器:元器件多而复杂,连线复杂易出错,设计困难,且功耗较大,不经济,不利于节约环保。
基于PLC技术设计的交通灯控制器:设计程序简单易懂,但价格较贵,不经济。
项目特色:通过单片机控制,进行模块化处理,体积小,功耗低,元器件少且简单,价格实惠,功能齐全,能够实现正常显示,而不会出现4路口交通灯混乱的情况,时间显示正常。
二、总体设计
总体设计模式图:
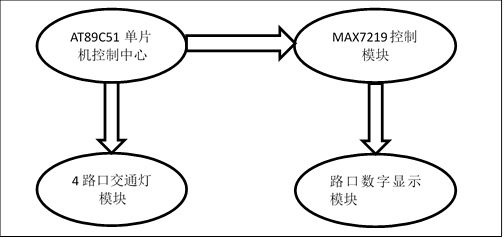
用一片AT89C51单片机控制4路口交通灯的亮灭。单片机发送地址、数据信息给MAX7219,通过MAX7219控制数码管的时间显示。
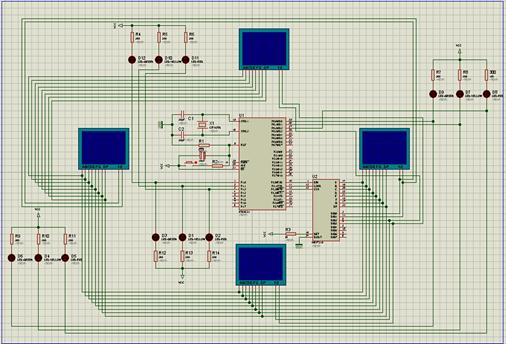
三、硬件设计
硬件原理图:
电路图:
硬件选型及相关依据:
AT89C51:4组8位I/O输入/输出端口,可满足控制所需I/O口数目要求。可外接时钟电路,有复位管脚,接复位电路可实现复位功能。接5V高电平,功耗小,价格低。
MAX7219:串行输入,16位并行输出,可控制8位八段数码管显示。满足设计中的四位控制要求。
4组2位共阴数码管:4路口两位数显示,满足所需,易实现控制。
4个LED-GREEN:10mA额定电流,2.2V额定电压,用于模拟十字路口绿灯亮灭显示。
4个LED-YELLOW:10mA额定电流,2.0V额定电压,用于模拟十字路口黄灯亮灭显示。
4个LED-RED:10mA额定电流,2.0V额定电压,用于模拟十字路口红灯亮灭显示。
4个280Ω电阻、8个300Ω电阻:由VCC=V+IR,(VCC:5V;I:LED灯额定电流;V:LED灯额定电压)计算出电阻大小。
9KΩ电阻1个:MAX7219的18管脚接高电平时串联电阻。
12MHZ晶振1个、30pf电容2个:根据经验,12M晶振与2个30p电容并联构成外部时钟振荡电路。
10KΩ电阻1个、1KΩ电阻1个、10uf电解电容1个、1个按键:构成单片机复位电路。电容放电时间τ=RC=10K 10uf=0.1s>21/12M=
10uf=0.1s>21/12M= s(2个时钟周期),即电容放电时间大于2倍的时钟周期,即可实现复位。
s(2个时钟周期),即电容放电时间大于2倍的时钟周期,即可实现复位。
AT89C51简介:
AT89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Falsh Programmable and Erasable Read Only Memory)的低电压,高性能CMOS8位微处理器,俗称单片机。该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
主要特性:
与MCS-51 兼容 ;4K字节可编程闪烁存储器 ;寿命:1000写/擦循环;数据保留时间:10年;全静态工作:0Hz-24Hz;;三级程序存储器锁定;128*8位内部RAM;32可编程I/O线;两个16位定时器/计数器;5个中断源;可编程串行通道;低功耗的闲置和掉电模式;片内振荡器和时钟电路。
MAX7219芯片简介:
MAX7219 是MAXIM 公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219 可驱动8 个7 段(包括小数点共8 段)数字LED、LED 条线图形显示器、或64 个分立的LED 发光二级管。该芯片具有10MHz 传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED 的段电流。它的操作很简单,MCU 只需通过模拟SPI 三线接口就可以将相关的指令写入MAX7219 的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。此外它还支持多片7219 串联方式,这样MCU 就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。MAX7219 的外部引脚分配如图1 所示及内部结构如图所示。
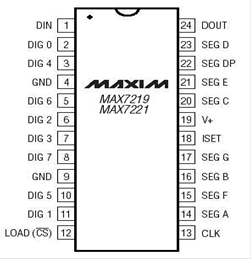
各引脚的功能为:
DIN:串行数据输入端
DOUT:串行数据输出端,用于级连扩展
LOAD:装载数据输入
CLK:串行时钟输入
DIG0~DIG7:8 位LED 位选线,从共阴极LED 中吸入电流
SEG A~SEG G DP 7 段驱动和小数点驱动
ISET: 通过一个10k 电阻和Vcc 相连,设置段电流
MAX7219 有下列几组寄存器: 译码控制寄存器、亮度控制寄存器、扫描界限寄存器、关断模式寄存器、测试控制寄存器。编程时只有正确操作这些寄存器,MAX7219 才可工作。
MAX7219读写时序说明:
MAX7129 是SPI 总线驱动方式。它不仅要向寄存器写入控制字,还需要读取相应寄存器的数据。
要想与MAX7129 通信,首先要先了解MAX7129 的控制字。MAX7129 的控制字格式如下图。

如图,工作时,MAX7219 规定一次接收16 位数据,在接收的16 位数据中:D15~D12 可以与操作无关,可以任意写入,D11~D8 决定所选通的内部寄存器地址,D7~D0 为待显示数据或是初始化控制字。在CLK 脉冲作用下,DIN 的数据以串行方式依次移入内部16 位寄存器,然后在一个LOAD 上升沿作用下,锁存到内部的寄存器中。注意在接收时,先接收最高位D16,最后是D0,因此,在程序发送时必须先送高位数据,在循环移位。工作时序图见下图。
由于51 是8 位单片机故需要分两次来送数据。
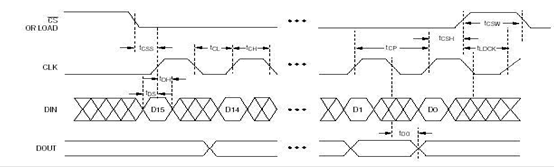
数据读写时序图
单片机复位电路:
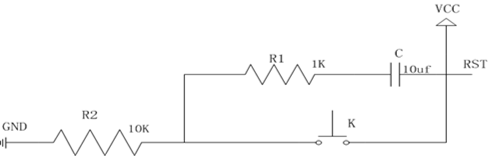
上电自动复位原理:
在电路图中,电容的的大小是10uF,电阻的大小是10k。所以根据公式,可以算出电容充电到电源电压的0.7倍(单片机的电源是5V,所以充电到0.7倍即为3.5V),需要的时间是10K*10UF=0.1S。
也就是说在启动的0.1S内,电容两端的电压时在0~3.5V增加。这个时候10K电阻两端的电压为从5~1.5V减少(串联电路各处电压之和为总电压)。所以在0.1S内,RST引脚所接收到的电压是5V~1.5V。在5V正常工作的51单片机中小于1.5V的电压信号为低电平信号,而大于1.5V的电压信号为高电平信号。所以在开机0.1S内,单片机系统自动复位(RST引脚接收到的高电平信号时间为0.1S左右)。
按键按下的时候复位原理:
在单片机启动0.1S后,电容C两端的电压持续充电为5V,这是时候10K电阻两端的电压接近于0V,RST处于低电平所以系统正常工作。当按键按下的时候,开关导通,这个时候电容两端形成了一个回路,电容被短路,所以在按键按下的这个过程中,电容开始释放之前充的电量。随着时间的推移,电容的电压在0.1S内,从5V释放到变为了1.5V,甚至更小。根据串联电路电压为各处之和,这个时候10K电阻两端的电压为3.5V,甚至更大,所以RST引脚又接收到高电平。单片机系统自动复位。
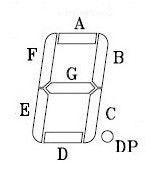
数码管简介:
数码管也称LED数码管,数码管按段数可分为七段数码管和八段数码管,八段数码管比七段数码管多一个发光二极管单元(多一个小数点显示);按能显示多少个(8)可分为1位、2位、3位、4位、5位、6位、7位等数码管。
按发光二极管单元连接方式可分为共阳极数码管和共阴极数码管。共阳数码管是指将所有发光二极管的阳极接到一起形成公共阳极(COM)的数码管,共阳数码管在应用时应将公共极COM接到+5V,当某一字段发光二极管的阴极为低电平时,相应字段就点亮,当某一字段的阴极为高电平时,相应字段就不亮。共阴数码管是指将所有发光二极管的阴极接到一起形成公共阴极(COM)的数码管,共阴数码管在应用时应将公共极COM接到地线GND上,当某一字段发光二极管的阳极为高电平时,相应字段就点亮,当某一字段的阳极为低电平时,相应字段就不亮。

驱动方式:分静态显示驱动和动态显示驱动两种方式。
静态驱动也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个单片机的I/O端口进行驱动,或者使用如BCD码二-十进制译码器译码进行驱动。
数码管动态显示接口是单片机中应用最为广泛的一种显示方式之一,动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为每个数码管的公共极COM增加位选通控制电路,位选通由各自独立的I/O线控制,当单片机输出字形码时,所有数码管都接收到相同的字形码,但究竟是哪个数码管会显示出字形,取决于单片机对位选通COM端电路的控制,所以我们只要将需要显示的数码管的选通控制打开,该位就显示出字形,没有选通的数码管就不会亮。通过分时轮流控制各个数码管的的COM端,就使各个数码管轮流受控显示,这就是动态驱动。在轮流显示过程中,每位数码管的点亮时间为1~2ms,由于人的视觉暂留现象及发光二极管的余辉效应,尽管实际上各位数码管并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,不会有闪烁感,动态显示的效果和静态显示是一样的,能够节省大量的I/O端口,而且功耗更低。
四、软件设计
首先对程序进行模块化处理,根据要求的4路口交通灯的具体功能,对程序进行模块化处理。
根据不同功能的分配可以将程序划分为以下几个模块:
主模块、MAX7219初始化模块、初始化模块(主函数初始化)、定时器模块、MAX7219地址和数据发送模块、数字变化处理模块。
由子模块的功能,可以设计绘制出各模块的程序流程图。各子模块之间可能会有联系,也可能没有联系,最后由主模块对其进行必要的汇总处理,实现要求的功能。流程图绘制完毕后,可以将流程图作为编程的依据,进行编程操作。如此,可使程序简化处理,减少错误,提高程序的编写效率。给自己带来不少的方便之处。
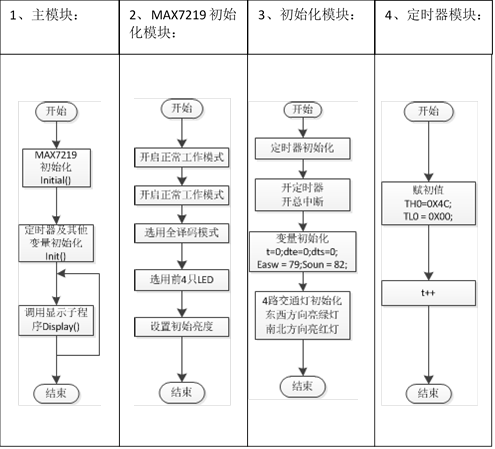
程序流程图:
本着简洁清晰明了易懂的目的,对程序模块化处理,不同模块执行不同的功能。就如同多元化的大家庭一样,进行不同的分工,个分工之间也可能存在联系。最后,由主模块进行总的调用处理,从而将零散的分工汇聚一起,共同实现最终的目的。
模块说明:
主模块:采用顺序循环程序设计,进行汇总处理,实现最终的目的。即实现交通等控制器功能,东西通行时间为80s,南北通行时间为60s,缓冲时间为3s。
MAX7219初始化模块:顺序调用MAX7219地址、数据发送模块,对MAX7219进行初始化处理。
初始化模块:采用顺序程序对定时器中断初始化,开中断定时器进行计时。并对相应变量和交通灯做初始化出处理。
数码管数字显示处理模块:调用数字变化处理模块,得到正确的跳变时间,根据时间的变化做出相应变化,并作出相应的处理。调用MAX7219地址和数据发送模块使数字信息在数码管上正确地显示出来。
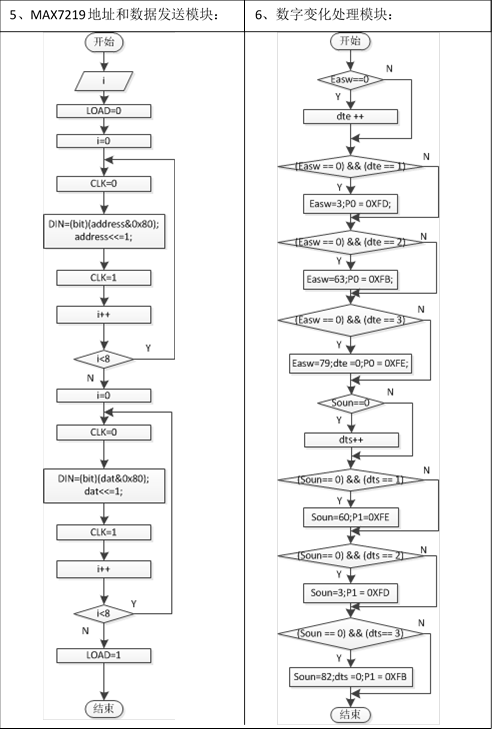
MAX7219地址和数据发送模块:根据MAX7219地址、数据发送时序图,对MAX7219做相应处理,使其能够发送一位地址和数据。
数字变化处理函数:当数字变量变为0时,相应方向的数字变化标志增1,并根据数字变化标志当前值,使数字变量做出相应的变化,并使相应方向上相应的灯发亮。以实现数字变量从0的正确跳转和交通灯的正确发亮。
定时器模块:对定时器重新赋初值,并使时间标志t加1计时。
五、程序清单
#include<reg51.h>
#define unint unsigned int
#define unchar unsigned char
//管脚定义
sbit DIN=P3^0;
//MAX7219 串行数据 1 脚
sbit LOAD=P3^1;
//MAX7219 片选 12
sbit CLK=P3^2;
//MAX7219 串行时钟 13 脚
//寄存器宏定义
#define DECODE_MODE 0x09
//译码控制寄存器
#define INTENSITY 0x0A
/亮度控制寄存器
#define SCAN_LIMIT 0x0B
//扫描界限寄存器
#define SHUT_DOWN 0x0C
//关断模式寄存器
#define DISPLAY_TEST 0x0F
//测试控制寄存器
//定义全局变量
unchar t,dte,dts;
//t为1ms脉冲产生标志,dte、dts分别为东西方向、南北方向数字变化标志
unchar Easw,Soun;
//东西、南北方数码管数字变量
//函数声明
void Write7219(unchar address,unchar dat);
//MAX7219控制处理函数声明
void Display();
//数码管数字显示处理函数声明
void Initial(void);
//MAX7219初始化函数声明
void Init(void);
//定时器初始化函数声明
/*主函数:交通等控制器,东西通行时间为80s,南北通行时间为60s,缓冲时间为3s。*/
void main(void)
{
Initial();
//MAX7219 初始化
Init();
//变量初始化
while(1)
{
Display(); //调用显示函数
}
}
/*MAX7219初始化函数:MAX7219 初始化,设置MAX7219 内部的控制寄存器*/
void Initial(void)
{
Write7219(SHUT_DOWN,0x01);
//开启正常工作模式(0xX1)
Write7219(DISPLAY_TEST,0x00);
//选择工作模式(0xX0)
Write7219(DECODE_MODE,0xff);
//选用全译码模式
Write7219(SCAN_LIMIT,0x03);
//选用前4只LED
Write7219(INTENSITY,0x04);
//设置初始亮度
}
/*初始化函数:设置定时/计数器0工作方式1,设置50ms定时时间,并进行初始化。开总中断、定时/计数器0,初始化所需全局变量 */
void init()
{
TMOD = 0X01;
//设置定时器0工作方式1
TH0 = 0X4C;
//定时器0高八位初始化
TL0 = 0X00;
//定时器0低八位初始化
ET0 = 1;
//定时器0中断允许
TR0 = 1;
//开定时器0
EA = 1;
//开总中断
t = 0;
dte = 0;
dts = 0;
Easw = 79;
//东西方向数码管初值79
Soun = 82;
//南北方向数码管初值82
P0 = 0XFE;
//初始化东西方向亮绿灯
P1 = 0XFB;
//初始化南北方向亮红灯
}
/*数码管数字显示处理函数:通过定时器精确定时,动态地显示交通灯时间的变化 */
void Display()
{
unchar i;
unchar Ewsn[4]={0};
//定义一个只含四个元素的一位数组
void Digit_deal();
//数字变化处理函数声明
if(t >= 20)
//t=20时,定时1秒,Easw、Soun做自减
{
t= 0;
Easw--;
Soun--;
}
Digit_deal();
//数字变化处理函数
Ewsn[0] = Easw/10;
//东西显示数字十位
Ewsn[1] = Easw%10;
//东西显示数字个位
Ewsn[2] = Soun/10;
//南北显示数字十位
Ewsn[3] = Soun%10;
//南北显示数字个位
for(i=1;i<5;i++)
{
Write7219(i,Ewsn[i-1]);
//4位共阴数码管显示
}
}
/*地址、数据发送子程序:MAX7219地址和数据的发送,以确保数码管的正常显示*/
void Write7219(unchar address,unchar dat)
{
unchar i;
LOAD=0;
//拉低片选线,选中器件
//发送地址
for (i=0;i<8;i++)
//移位循环8 次
{
CLK=0;
//清零时钟总线
DIN=(bit)(address&0x80);
//每次取高字节
address<<=1;
//左移一位
CLK=1;
//时钟上升沿,发送地址
}
//发送数据
for (i=0;i<8;i++)
{
CLK=0;
DIN=(bit)(dat&0x80);
dat<<=1;
CLK=1;
//时钟上升沿,发送数据
}
LOAD=1;
//发送结束,上升沿锁存数据
}
/*数字变化处理函数:对东西南北方向数字变换时值的处理 */
void Digit_deal()
{
//东西方向数字变换
if(!Easw)
//Easw为0时,dte加1
{
dte ++;
}
if((Easw == 0) && (dte == 1))
//Easw为0且dte为1时,东西方向数字置为3,亮黄灯
{
Easw = 3;
P0 = 0XFD;
}
if((Easw == 0) && (dte == 2))
//Easw为0且dte为2时,东西方向数字置为63,亮红灯
{
Easw = 63;
P0 = 0XFB;
}
if((Easw == 0) && (dte == 3))
//Easw为0且dte为3时,东西方向数字置为79,dte置0,亮绿灯
{
Easw = 79;
dte = 0;
P0 = 0XFE;
}
//南北方向数字变换
if(!Soun)
//Soun为0时,dts加1
{
dts ++;
}
//Soun为0且dts为1时,南北方向数字置为60,亮绿灯
if((Soun == 0) && (dts == 1))
{
Soun = 60;
P1 = 0XFE;
}
if((Soun == 0) && (dts == 2))
//Soun为0且dts为2时,南北方向数字置为3,亮黄灯
{
Soun = 3;
P1 = 0XFD;
}
if((Soun == 0) && (dts == 3))
//Soun为0且dts为3时,南北方向数字置为82,dts置0,亮红灯
{
Soun = 82;
dts = 0;
P1 = 0XFB;
}
}
/*定时器0中断函数:产生50ms脉冲,实现1s钟时间定时*/
void Time0() interrupt 1
{
TH0 = 0X4C;
TL0 = 0X00;
t++;
}
六、收获及体会
在课程设计中,体验到了单片机在生活中的强大作用。一片小小的单片机竟能有如此之神奇,控制交通灯显示我们想要的结果,给我们的生活带来了极大的便利。
一个学期的理论学习让人深感疲惫,然而一个小小的课程设计,竟能在此调动自己求学上进的内心。理论课上积累的身后的基础,是最后设计成果的巨大财富。虽然设计过程中遇到过些小问题,但总体感觉还是很好的。在进行设计之前,先对MAX7219芯片进行了学习,为设计做好准备。在程序的编写过程中,对MAX7219芯片的地址、数据输入的编写遇到了些小问题,使得最后无法正常输出。认真研究比对MAX7219芯片的读写时序图,对程序加以修改,最终实现自己的目标,达到了要求,幸而解决了设计中的关键一步。
在设计的过程中,遇到问题逐项分析,有时与同学们一起讨论,从中收获颇丰。这次课程设计与上次的设计虽然都有数码管显示,但是我运用控制数码管的芯片确是不同的。上次我运用的是较为熟悉的74HC573,八位数入端口,八位输出端口,有片选段。用了两片的74HC573,共占用单片机10个I/0输入输出端口。虽然程序写起来比较简单易懂。但是用了两片的74HC573,比较起来这次显得有点多,成本也就高了。另外,占用10个I/O输入输出端口,浪费I/O资源。比起运用74HC573控制数码管的显示,运用MAX7219使得成本降低了(用了一片的MAX7219)。同时,占用的I/O资源也少了(只占用了3个I/O输入输出端口),这在以后的项目开发设计中占有巨大的优势。所以在进行项目设计时应当注意芯片的比较选择,给自己带来最大的方便与实惠。
另外,在设计中,模块化显得尤其重要。模块化处理使得项目设计显得清晰明了,也大大简化的设计过程,同时也极大地简化了程序编写过程,降低了程序错误的出现,还给理解程序带来了极大的便利。运用模块化处理,使得电路原理图清晰明了,也是流程图设计清晰易懂。
通过此次的课程设计,不仅又一次验证了对理论知识的掌握,同时也又一次地体验了设计带来的乐趣,感受单片机带给自己对学习的动力。相信在以后的学习中会有更大的收获的。
七、参考文献
《单片机中级教程——原理与应用(第二版)》 张俊谟 主编,北京航空航天大学出版社20##年6月出版
《单片机原理及接口技术(C51编程)》 张毅刚主编,人民邮电出版社出版20##年8月出版
《单片机原理及接口技术第二版》李全利主编,高等教育出版社 20##年1月出版
电子发烧友网:http://www.elecfans.com/yuanqijian/jiekou/200802298085.html
21ic电子网社区:http://www.21icsearch.com/pdf-69956CF62559BF6A/AT89C51.html
中国工控网:http://www.gongkong.com/
中国66电子网:http://www.ec66.com/article/
-
交通灯控制电路设计报告
数字电路课程设计交通灯控制电路设计学院:信息科学技术学院班级:姓名:学号:指导老师:20##年4月26日目录一、设计任务.....…
-
交通灯控制设计实验报告
安徽科技学院数字电子技术课程设计设计报告设计题目交通灯控制设计班级网络工程121姓名丁俊杰学号成绩评阅人吕跃凤安徽科技学院理学院目…
-
交通灯控制电路设计报告
课程设计大作业报告课程名称数字电子技术设计题目交通灯控制电路设计院系信息技术学院班级20xx计算机科学与技术2班设计者学号指导教师…
-
交通灯控制器电路设计报告
交通灯控制器电路设计报告一设计要求1设计一个十字路口的交通灯控制器先是绿灯亮25秒紧接着黄灯亮5秒紧接着红灯亮30秒依此顺序循环控…
-
交通灯控制电路设计报告
华北科技学院数字电路设计报告交通灯控制电路设计报告目录一设计任务和要求2二设计方案的总体思路与选择31时钟信号发生器电路设计论证4…
-
基于PLC的十字路口交通灯控制系统设计开题报告
毕业设计论文开题报告课题名称基于PLC的十字路口交通灯类别专业班电气自动化姓名刘成指导教师刘德化华中科技大学评分华中科技大学毕业设…
-
基于PLC的十字路口交通灯控制系统设计开题报告
毕业设计论文开题报告课题名称基于PLC的十字路口交通灯类别专业班电气0903姓名熊小鹏指导教师刘晶华中科技大学武昌分校评分华中科技…
-
基于PLC的十字路口交通灯控制系统设计开题报告
毕业设计论文开题报告课题名称基于PLC的十字路口交通灯类别专业班电气0903姓名熊小鹏指导教师刘晶华中科技大学武昌分校评分华中科技…
-
基于单片机的交通灯控制系统设计开题报告
泰山学院毕业论文设计开题报告题目基于单片机的交通灯控制系统设计学院机械与工程学院年级二零一一32专业机械设计制造及其自动化姓名学号…
-
交通灯控制电路设计报告
华北科技学院数字电路设计报告交通灯控制电路设计报告目录一设计任务和要求2二设计方案的总体思路与选择31时钟信号发生器电路设计论证4…
-
单片机交通灯课程设计报告(含电路图,源程序)
摘要31引言42总体设计方案521设计思路5211设计目的5212设计任务和内容6213方案比较设计与论证6214芯片简介922设…