摄影测量实习报告
摄影测量学实习报告
学院:测绘工程学院
专业:测绘工程专业
学号:
姓名:
东华理工大学测绘工程学院
2012.11
摄影测量学实习报告
实习一 航摄像片判读
实习目的和要求:
1. 通过像片判读,根据像片上的影像来识别地面上相应地物的性质、位置和大小
2. 了解地物在航摄像片上构像的一般规律及特征。
实习资料与用具:
1、 一张东华理工大学及附近地区的航摄像片。 2、透明纸一张。 3、皮尺一把,刺点针、三角板、铅笔、橡皮。
实习内容及作业步骤:
(一)一般性判读
首先在室内将像片上的主要地物转绘到透明片上,然后带着航片和转绘好地物的透明纸到实地查看新增地物,并根据新增地物在像片上的大致位置,将其勾绘到透明纸上,同时注明各地物的名称。
在进行这项工作的同时,应注意各地物在像片上的成像规律(如色调、阴影等)。
(二)选点和刺点
在校园四周选四至五个明显地物点作为平面控制点。然后,仔细对照周围的相关地物,将它们的位置准确刺在像片上。刺点时,刺点针应垂直刺下,且刺孔不得大于0.2mm,刺点精度应达到像片上0.1mm。
刺点后,应在现场用铅笔在纸上画出刺点位置略图,并用文字注明刺点的位置及点的编号,略图力求简单明了,其大小约为2*2cm2,绘制略图时,注意应使略图上部为北。
计算航摄像片的构像比例尺和摄影航高
分别在学校的四周选取一地物(如房屋),用皮尺和三角板量取它们在实地的长度和在航片上的构像长度(实地量至分米,影像量至毫米)。分别计算出它们的构像比例尺,取它们的平均数作为这张航片的构像比例尺,并以此计算出摄影航高。(注:摄影机主距为150mm)
(三)投影差改正
目估出像片上某一高层建筑物的高度,通过该高度来计算出该建筑物上主要点(如角点)的投影差改正值,并在透明纸上进行改正。
实习二 全数字摄影测量的作业步骤
实习目的和要求
了解全数字摄影测量的作业步骤。
实习资料及用具
1、 VirtuoZo全数字摄影测量系统一套;
2、 外业控制点资料一套;
3、 相机参数数据一套。
实习操作步骤
本次实习内容为对全数字摄影测量系统(VirtuoZo)的使用,学生根据操作步骤将基本的作业流程做一遍。以便掌握该系统。该作业流程包括:数据准备、参数设置、定向、核线采集与匹配、DEM与DOM以及等高线生成、数字化测图、拼接与出图七个步骤。
1、数据准备
数字摄影测量所需资料:
相机参数:应该提供相机主点理论坐标X0、Y0,相机焦距f0,框标距或框标点标
控制资料:外业控制点成果及相对应的控制点位图
航片扫描数据:符合VirtuoZo图像格式及成图要求扫描分辨率的扫描影像数据。VirtuoZo可接受多种图像格式:如TIFF、BMP、JPG等。一般选TIFF格式。
具体操作如下:
检查原始数据,数据包括6张影像文件(*.tiff文件)、控制点文件(*.ctl文件)、相机检校文件(*.cmr文件)、每个控制点点位图以及一个数据说明文件,里面给出了数据处理所必须的测区信息。通过分析得到,测区有两条航带,每条航带3张影像。
2、建立测区与模型的参数设置
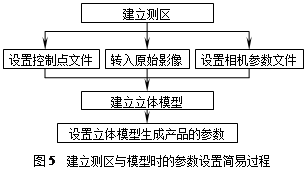 要建立测区与模型,VirtuoZo系统要设置很多参数,这些参数需要在参数设置对话框上逐一设置。如测区(Block)参数、模型参数、影像参数、相机参数、控制点参数、地面高程模型(DEM)参数、正射影像参数和等高线参数等。其中有些参数在VirtuoZo系统中有其固有的数据格式,需要按照VirtuoZo规定的格式进行填写,如相机参数、控制点参数等。建立测区与模型、设置参数的简易过程如图5所示:
要建立测区与模型,VirtuoZo系统要设置很多参数,这些参数需要在参数设置对话框上逐一设置。如测区(Block)参数、模型参数、影像参数、相机参数、控制点参数、地面高程模型(DEM)参数、正射影像参数和等高线参数等。其中有些参数在VirtuoZo系统中有其固有的数据格式,需要按照VirtuoZo规定的格式进行填写,如相机参数、控制点参数等。建立测区与模型、设置参数的简易过程如图5所示:
具体操作如下:
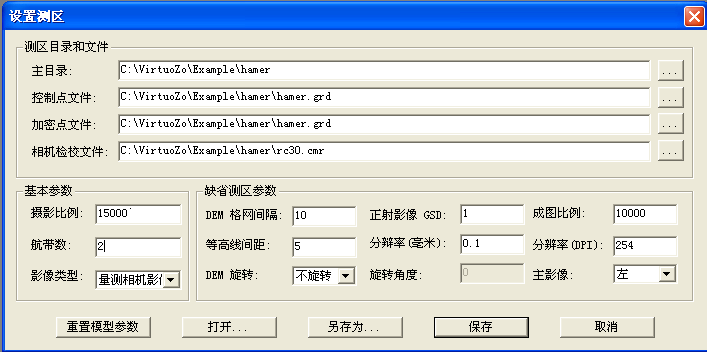
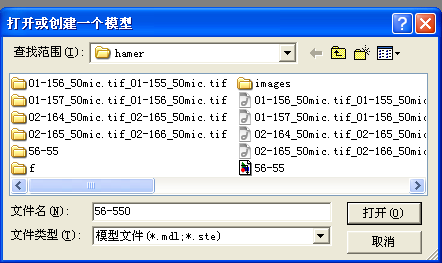
进入VIrtuoZo主界面,首先要新建一个测区,通过文件à打开测区,新建一个测区,文件建立好之后,系统会自动弹出设置测区的对话框,按照原始数据提供的信息填写相应的内容,之后保存退出。如图所示:
设置相机检校文件、控制点文件
进入设置à相机文件,找到刚才在设置测区对话框中新建的相机检校文件,双击进入参数设置界面,相机参数可以直接通过输入按钮,输入原始数据里面已有的相机文件(一般格式为*.cmr)。编辑界面如图所示:
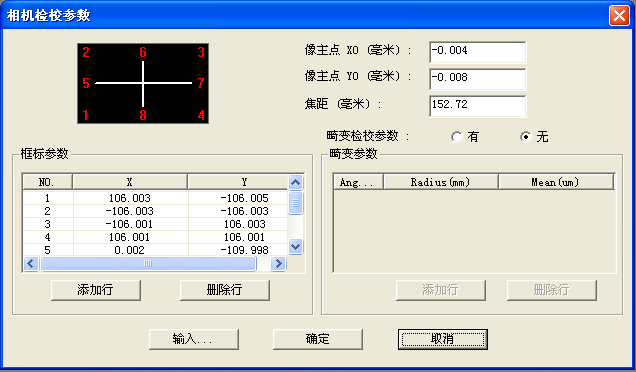
图7 相机检校参数设置界面
进入设置à地面控制点,可以逐点输入控制点文件,或者直接通过输入按钮,直接读取一个控制点文件,如图8所示:

图8 地面控制点设置窗口
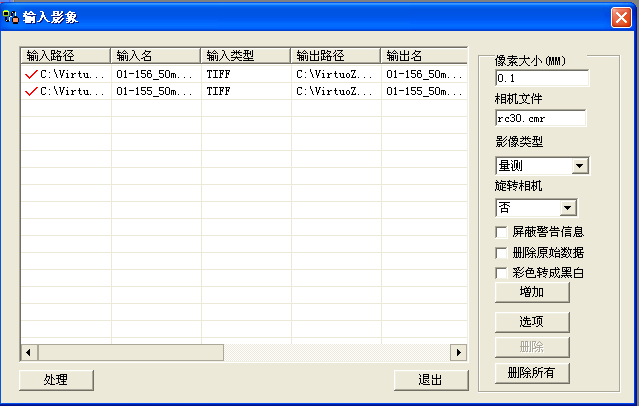
参数设置完成之后,还需要对影像文件进行转换,将各种影像文件转换成VirtuoZo支持的影像格式(VirtuoZo系统有其自有的影像格式,文件格式为*.vz,后文简称该文件为VZ影像)。进入文件à引入à影像文件,进入输入影像对话框,按 增加 按钮选择需转化格式的tif影像(可选择多幅影像),按处理 按钮将影像格式转换为后缀为vz 的影像。
进行模型的设置,模型的创建过程:通过文件à打开模型,可以建立一个新模型,命名为56-550,默认后缀名为mdl,建立好56-550模型后,程序自动弹出模型参数设置对话框,按照该模型的基本情况设置该对话框,主要设置左、右影像,其它可按程序默认参数设置,之后保存退出。如图所示:
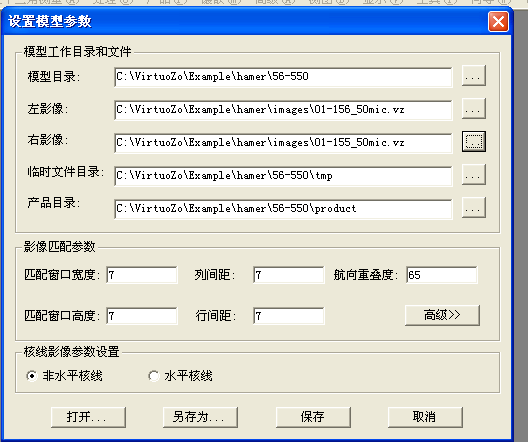
设置模型参数对话框
3、航片的内定向、相对定向与绝对定向
具体操作如下:
3.1.内定向作业流程:
内定向程序 处理à定向à内定向
左边的窗口显示了当前模型的影像,它的四角和四边上的框标被小白框围住。右边的小窗口显示了某框标的放大影像。若小白框没有围住框标,则可在框标上单击,小白框将自动围住框标。这样来调整小白框的位置,尽量使框标位于小白框的中心。然后单击 接受 按钮,完成框标定位。
建立框标模版界面
系统读入影像,同时显示读影像进度条,影像读入完成后,显示如下窗口:
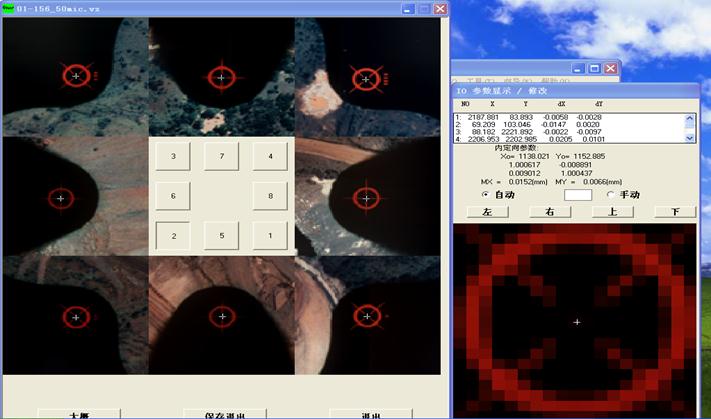
图14 内定向窗口
左边窗口的中心是按钮面板,每个方块按钮对应于一个框标。单击其中一个按钮,则右边微调窗口中将放大显示其对应的框标影像。左边窗口的四周是框标影像窗口,每个小窗口显示一个框标。
右边窗口的上边是IO 参数显示/修改窗口,可在此微调框标坐标。上半部的参数显示窗口,用来显示各框标的像片坐标、残差、内定向变换矩阵和中误差。下半部显示当前框标的放大影像。
4. 微调框标坐标
为使内定向的精度满足作业要求,应尽量使白色的十字丝对准框标的中心。这时,要使用到框标的放大影像。具体操作是通过方块按钮选择第一个框标,然后利用右边窗口中的按钮,进行微调,直到框标放大影像中的白色十字丝对准相机的框标中心
对其他的框标用同样的方法进行调整,将所有的白色十字丝对相机准框标中心,然后选择保存退出,左影像内定向完成。重复以上步骤对模型中的右影像做内定向操作。完成模型的内定向,进入相对定向。
3.2.相对定向作业流程:
调用相对定程序(处理à定向à相对定向),程序界面如图16所示:
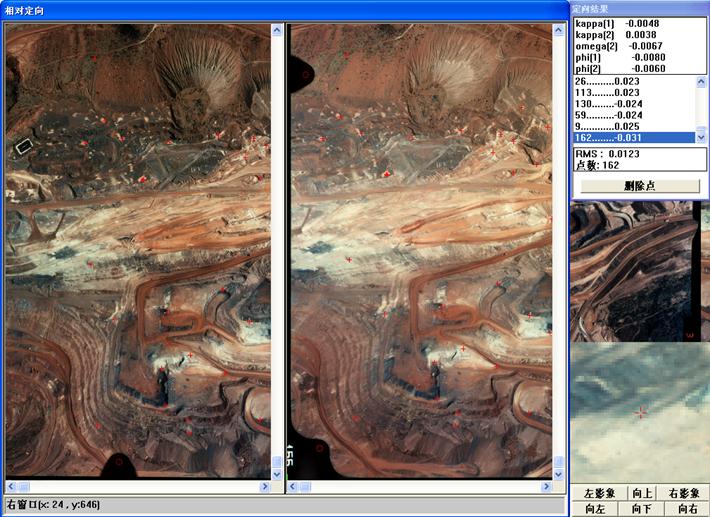
图16 相对定向界面
进入相对定向界面,单击右键,进行自动相对定向:
程序将自动寻找同名点,进行相对定向。完成后,影像上显示相对定向点(红十字丝)。
4、绝对定向作业流程:
绝对定向前,要以手工的方式在当前模型的左右影像上准确的定位一些控制点
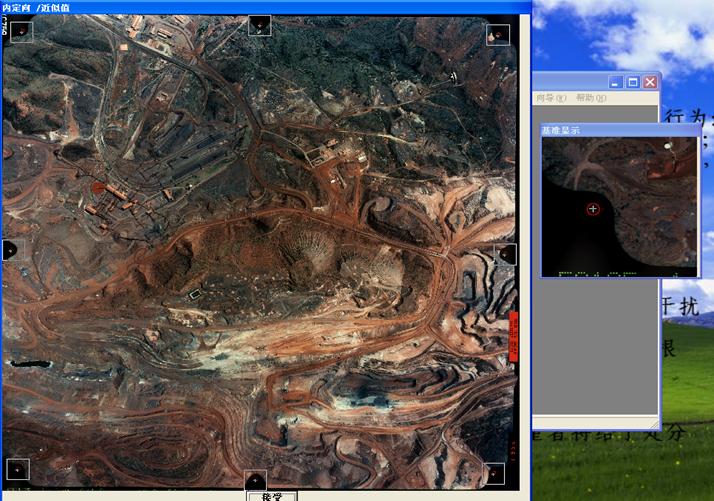
打开 hamerIndex.html 文件,查看测区的控制点分布情况,在航片上点击控制点,会出现放大图像,是量测控制点的依据。量测控制点是在相对定向的界面下进行的。见图,按右键,在弹出的菜单上选全局显示,在相对定向的界面中出现整张的左\右影像上,如图所示,参照给出的控制点点位图,寻找相应的控制点,找到后在点位附近点击,系统会弹出一放大的影像的小窗口,在该小窗口中,将光标对准该控制点,单击鼠标左键,程序将自动匹配出右\左影像上的同名点,也以一放大的影像的小窗口显示,同时有一个调整点位的对话框出现,图右下角。

图 15 绝对定向窗口
当量测三个控制点后(三个控制点不能位于一条线上),系统会预测该模型其余控制点的位置。影像上显示出几个蓝色小圈,即系统预测的待测控制点的近似位置。加点时使用的点号应该和控制点文件中的点号要一致。
进入普通方式的绝对定向(在相对定向界面点击鼠标右键,选择绝对定向à普通方式),程序进行绝对定向计算,可以得到如下图所示的界面:在定向结果窗中显示绝对定向的中误差及每个控制点的定向误差。同时弹出控制点微调窗,窗中显示当前控制点的坐标,且设置了立体下的微调按钮。绝对定向界面如图所示:

检查与调整:
根据控制点残差显示可知绝对定向的精度如何,若某控制点残差过大,则可进行微调。其微调方法与步骤如下:
在定向结果窗中对某控制点误差行单击鼠标左键,选中该点,弹出该控制点的微调窗。
立体影像微调(必须在支持立体显示的计算机上才可以用此功能):
选中另一个需调整的点,进行微调。
所需调整的点均完成后,选择控制点微调窗中的确定按钮,程序返回相对定向界面。
至此,绝对定向完成。
5、同名核线影像的采集与匹配
具体操作如下:
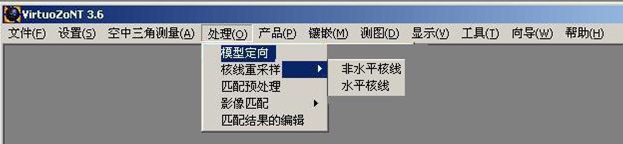
5.1.生成核线影像
直接在VirtuoZo 主界面中单击处理菜单下的核线重采样菜单项,系统将自动生成当前模型的核线影像。
5.2.影像匹配
生成核线影像后,即可进行影像匹配,选择菜单处理→影像匹配,系统将自动进行影像匹配。匹配过程中,会显示出匹配的进度。
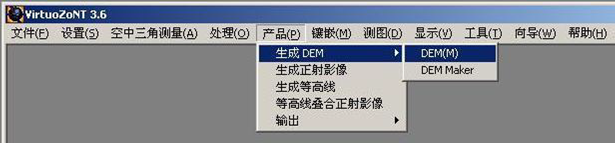
5.3、单模型的DEM 生成:
完成模型的影像匹配和匹配结果的编辑之后,可生成数字高程模型DEM。单模型的DEM是指使用一个单模型的数据,生成的位于该单模型区域内的DEM。一般情况下生成的DEM都是单模型的DEM。
查看DEM
单模型透视景观:建立数字地面模型后,在系统主菜单中,选择显示à立体显示à透示显示项,,进入显示界面,屏幕显示当前模型的数字地面模型,如图所示:
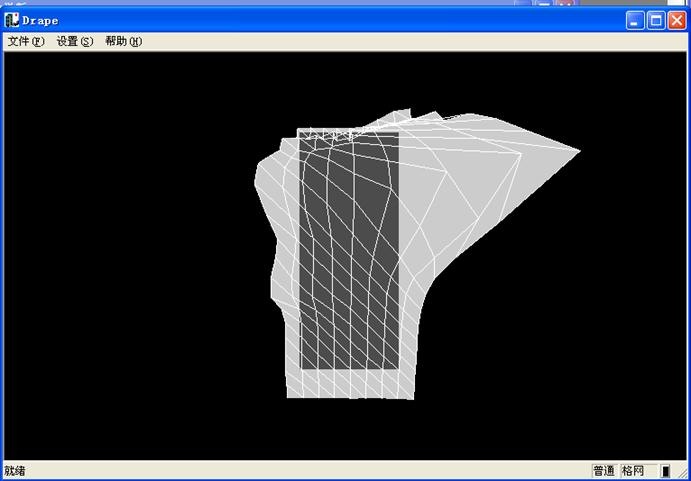
图23 DEM显示
还可以生根据自己的需要生成其他的产品,如:DOM,等高线
实习感想:
通过本次实习我们主要进行了像片的判读,调绘,以及使用VirtuoZo全数字摄影测量系统进行内业实习,我感觉受益匪浅。这次实习是我基本了解了地物在航摄像片上构像的一般规律及特征,全数字摄影测量系统的操作工程,也让我们对于摄影测量的生产过程有所了解感觉不再像以前那样空洞了。
第二篇:VirtuoZo NT全数字摄影测量系统实习报告
VirtuoZo 全数字摄影测量系统实习报告
一、 实习目的
通过本次实习,了解4D产品的生产过程,熟悉使用VirtuoZo 全数字摄影测量系统生产4D产品的过程,掌握生产过程中各步骤的原理,加深对有关理论知识的理解。
(1) 了解VirtuoZo数字摄影测量系统的功能;
(2) 掌握VirtuoZo数字摄影测量系统的作业流程;
(3) 加深对数字摄影测量基本理论、方法和过程的理解;
(4) 培养实际动手能力。
二、 实习过程
1、 了解VirtuoZo 系统
VirtuoZo系统是基于WindowsNT的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业。由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。从原始资料、中间成果及最后产品等都是以数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
VirtuoZo的主要软件模块包括:解算定向参数、自动空中三角测量、核线影像重采样、影像匹配、生成数字高程模型、制作数字正射影像、生成等高线、制作景观图、DEM透视图、等高线叠加正射影像、基于数字影像的机助量测、文字注记、图廓整饰。
VirtuoZo的作业方式为自动化与人工干预。系统在自动化作业状态下运行不须任何人工干预。人工干预是作为自动化系统的“预处理”与“后处理”,如必要的数据准备、必要的辅助量测等及自动化过尚无法解决的问题。人工干预不同于单的人工控制操作,而是尽可能达到了半自动化。
根据VirtuoZo制作4d产品的基本工作流程如下:
2、 数据准备
(1) 实习测区资料分析
根据给定的实习的原始资料,了解测区的航线数、影像数、原始影像的分辨率、像片比例尺、全测区控制点分布、控制点数据、相机数据。
(2) 建立测区
数据准备完善后,进入VIrtuoZo主界面,首先要新建一个测区,通过文件打开测区,新建一个测区名,系统默认后缀名为blk,默认保存在系统盘下的wxf文件夹里。*.blk文件其实只是个索引文件,它最终指向的是设置测区里的测区主目录文件夹。*.blk文件建立好之后,系统会自动弹出设置测区的对话框,按照原始数据提供的信息填写相应的内容,之后保存退出。
进入设置→相机文件,找到刚才在设置测区对话框中新建的相机检校文件,双击进入参数设置界面,相机参数可以直接通过输入按钮,输入原始数据里面已有的相机文件(一般格式为*.cmr)。
进入设置→地面控制点,可以逐点输入控制点文件,或者直接通过输入按钮,直接读取一个控制点文件。
参数设置完成之后,还需要对影像文件进行转换,将各种影像文件转换成VirtuoZo支持的影像格式(VirtuoZo系统有其自有的影像格式,文件格式为*.vz。进入文件_引入_影像文件,进入输入影像对话框,通过增加按钮,将所要处理的原始影像引入对话框,由于飞机是循环飞行进行拍摄的,第二条航带的影像的相机文件需要进行旋转:选中第二条航带的3张影像,点选项按钮,在弹出的对话框中将相机旋转后面的选项选择是,确认之后即可看到需要进行相机旋转的影像前有一个红色旋转的符号。然后填写正确的像素大小,该像素大小需要在原始数据里面给出,如果没有提供该数据,可以输入-1,系统会自动读取原始影像的头文件,然后给出一个像素大小。参数设置完成之后点处理,影像开始进行转换,转换成的VZ影像将放在测区主目录下的images文件夹里面,每生成一个VZ影像,程序还会为该影像对应一个影像参数文件,文件格式为*.spt。
(3) 建立模型
进行模型的设置,现以157和156两张影像为例,介绍模型的创建过程:通过文件→打开模型,可以建立一个新模型,命名为157-156,默认后缀名为mdl,建立好157-156模型后,程序自动弹出模型参数设置对话框,按照该模型的基本情况设置该对话框,主要设置左、右影像,其它可按程序默认参数设置,之后保存退出。同样的操作,可以把其他模型都创建好,完成所有模型的参数设置。
3、 模型定向
(1) 内定向
调用内定向程序(处理→定向→内定向),建立框标模板(若模板已建立,则进入左影像的内定向)。
为了从数字影像提取集合信息,必须建立数字影像中的像元素与所摄物体表面相应的点之间的数学关系。内定向的目的就是确定扫描坐标系与像片坐标系之间的关系以及数字影像可能存在的变形。
不同型号的相机有着不同的框标模板。一般一个测区使用同一相机摄影,所以只需在测区内选择一个模型建立框标模板并进行内定向,其他模型不再需要重新建立框标模板,即可直接进行内定向处理,在做内定向处理时,系统会自动建立多个框标模板。界面右边小窗口为某个框标的放大影像,其框标中心点清晰可见。界面左窗口显示了当前模型的左影像,若影像的四角的每个框标都有白色的小框围住,框标近似定位成功。若小白框没有围住框标,则需进行人工干预:移动鼠标将光标移到某框标中心,单击鼠标左键,使小白框围住框标。
依次将每个小白框围住对应的框标后,框标近似定位成功。选择界面左窗口下的接受按钮。
左影像内定向:
该界面显示了框标自动定位后的状况。可选择界面中间小方块按钮将其对应的框标放大显示于右窗口内,观察小十字丝中心是否对准框标中心,若不满意可进行调整。框标调整有自动或人工两种方式:
自动方式:选择自动按钮后,移动鼠标在左窗口中的当前框标中心点附近单击鼠标左键,小十字丝将自动精确对准框标中心。
人工方式:若自动方式失败,则可选择人工按钮,移动鼠标在左窗口中的当前框标中心点附近单击鼠标左键,再分别选择上、下、左、右按钮,微调小十字丝,使之精确对准框标中心。
右影像内定向:
与左影像内定向相似,进行右影像的内定向。如果之前做过内定向的,系统会弹出一个对话框,显示左像片的内定向参数(系统在完成左像片的内定向后再启动右像片的内定向),并询问是否重新进行内定向。如果不想再进行内定向,选择否;退出内定向模块,进行相对定向。
(2) 相对定向
每张像片至少要有三个地面控制点,才能进行定向,但实际生产中,控制点数量不能满足定向要求。在内页求解定向所需控制点的过程叫空中三角测量,其本质就是用尽可能少量的地面控制点,在内页加密出每张像片或每个像对所需要的控制点。另一方面,为了获取更高精度的地面控制点,采用光束法定向,利用光束法平差未知参数的初值,从而进行高精度定向。在竖直航空摄影或已知倾角近似值的倾斜摄影时,相对定向一般采用迭代解法。但是当不知道倾斜摄影中的倾角近似值以及不知道影像的内方位元素时,则采用相对定向的直接解法。进行模型的相对定向,主要是通过找同名点,来确定两张影像之间的关系。
相对定向的目的是为了恢复构成立体像对的两张像片的相对方位,恢复摄影时相邻两影像光束的相互关系,从而使同名光线对对相交,建立被摄物体的几何模型。其数学模型是相应的摄影光线与基线应满足共面条件,观测值为上下视差。
步骤:
选择菜单 “处理→模型定向→相对定向”;
在影像显示窗口内点击右键,选择“自动相对定向”;
自动相对定向完成后,在定向结果窗口检查同名点的上下视差,如果比较大,则比较大,则把它删除或进行调整;编辑完成后,保存,退出。
(3) 绝对定向
相对定向建立的立体模型,是一个以相对定向中选定的像空间辅助坐标系为标准的模型,比例尺也是未知的。要确定立体模型在地面测量坐标系中的正确位置,则需要把模型点的摄影测量坐标转换为地面测量坐标,这一工作需要借助于地面测量坐标为已知值的地面控制点来进行,这个过程称为立体模型的绝对定向。所以绝对定向的目的就是将相对定西后求出的摄影测量坐标变换为地面测量坐标。
模型的绝对定向,要求变换前后的坐标系大致相同。而地面测量坐标是左手直角坐标系,摄影测量坐标系是右手直角坐标系。因此首先应将点名测量坐标系转换为地面摄影测量坐标系。绝对定向前,我们要以手工的方式在当前模型的左右影像上准确地定位一些控制点。
一个像对的两张像片有十二个外方位元素,相对定向求得五个相对定向元素后,要恢复像对的绝对位置还要解求七个绝对定向元素,包括模型的旋转、平移和缩放参数。它需要地面控制点来解求。这种坐标变换,在数学上成为三维空间相似变换。
步骤:
选择菜单“处理→模型定向→绝对定向”;
参照给出的控制点点位图,在相对定向界面中,寻找相应的控制点,对控制点的点位进行精确调整,输入控制点相应的点号,点击“确定”保存。
4、 生成核线影像
非水平方式的核线重采样是基于模型相对定向结果,遵循核线原理对左右原始影像沿核线方向保持X不变在Y方向进行核线重采样,这样所生成的核线影像保持了原始影像同样的信息量和属性。
步骤:
定义作业区;生成核线影→非水平核线;保存;退出;
按照同样的步骤,进行其他模型的内定向、相对定向、绝对定向、核线影像生成,当每个模型的核线影像生成后,则进行影像匹配计算。
5、 影像匹配及匹配后的编辑
选择菜单“处理→影像匹配”项,出现影像匹配计算的进程显示窗口,自动进行影像匹配。
匹配结果的编辑:
6、 生成单模型的DEM
在系统主菜单中,选择“产品→生成DEM→生成DEM(M)”项,屏幕显示计算提示界面,计算完毕后,即建立了当前模型的DEM。
在系统主菜单中,选择“显示→立体显示→透示显示”项,进入显示界面,屏幕显示当前模型的DEM。
7、 多模型的DEM拼接
在系统主菜单中,选择菜单“镶嵌→设置”项,屏幕弹出拼接与镶嵌参数设置对话框。 在系统主菜单中,选择“镶嵌→DEM拼接”项,进入DEM的拼接计算,屏幕弹出拼接进展显示条。当拼接完成后,将显示拼接中误差、总点数、误差分布统计及误差分布图。
8、 生成正射影像
在主界面上,依次单击“产品→生成正射影像”项,系统自动生成正射,单击“显示” →“正射影像”。
三、 实习总结
通过此次实习,了解了使用VirtuoZo 全数字摄影测量系统生产4D产品的过程,熟悉了VirtuoZo 全数字摄影测量系统的使用,加深了对相关知识的理解。
4d产品生产实习是一个综合性很强的实习,它是对所学摄影测量及相关专业的综合应用。该实习在数字摄影测量实习的基础上进行。
通过本次实习,了解到了VirtuoZo 全数字摄影测量系统的功能强大,在4d产品生产实习的过程中自动与半自动的快速生成功能。
实习中需要注意:定义核线范围以将控制点划在作业区范围内为宜,但不能超控太多;其次应结合实际地形情况,如高山地或大比例城区,由于左右像片视差较大,就应适当将核线范围划大些。
-
摄影测量实习报告
数字摄影测量实习报告题目数字摄影测量系统应用学生姓名庞志慧指导教师邵亚琴张会战学院矿业与煤炭学院专业班级测绘1102学生学号117…
-
摄影测量实习报告
摄影测量实习报告内外业实习一实习的目标外业实习包括像片控制点的布测和相片的调绘两部分内业实习有基于数字摄影测量系统生产数字产品和自…
-
摄影测量实习报告
摄影测量实习报告单张影像空间后方交会程序设计一实习目的深入理解单张影像空间后方交会呃原理体会再有多余观测情况下用最小二乘平差方法编…
-
摄影测量实习报告
一、实习目的与要求本次实习是在摄影测量的教学基础上,理论实际相联系的动手操作实习,是我们在学习测量专业的一个重要的实习环节。一方面…
-
摄影测量调绘实习报告
1曹志军摄影测量调绘实习报告摄影测量调绘实习报告学院测绘工程学院专业土地资源管理班级10216302学号1021630223姓名曹…
-
摄影外业测量实习报告
组别:指导老师:姓名:班级:学号:黄河水利职业技术学院实习内容:航摄像片调绘、新增地物补测及选刺像控点三项实习时间:20xx年x月…
-
摄影测量实习报告
一、实习目的与要求本次实习是在摄影测量的教学基础上,理论实际相联系的动手操作实习,是我们在学习测量专业的一个重要的实习环节。一方面…
-
VirtuoZo NT全数字摄影测量系统实习报告
VirtuoZo全数字摄影测量系统实习报告一、实习目的通过本次实习,了解4D产品的生产过程,熟悉使用VirtuoZo全数字摄影测量…
-
摄影测量内业实习报告
摄影测量内业实习报告姓名xxx班级学号xxx指导老师XX20xx年1月1实习目的VirtuoZo从原始资料中间成果及最后产品等都是…
-
摄影测量实习报告
摄影测量学实习报告系别测绘与城市空间信息系专业姓名学号指导教师柏春岚杨明强河南城建学院20xx年11月26日目录前言1实习意义与目…