�����첽�綯�������������

��Դ�밲ȫ����ѧԺ
�� Ŀ �����첽�綯�����͵���
ѧ �� �� �� �� �� ��
ѧ �� 32321102019
ѧ Ժ ��Դ�밲ȫ����ѧԺ
ר ҵ ��е���켰���Զ���
ժҪ��
���綯�����е������첽�綯��ת�ӵ�ת�ٵ�����ת�ų���ת�٣�ת ����������ų������������������첽�綯���������綯�ƺ͵������� ��ų�����ò������ת�أ�ʵ�������任���뵥���첽�綯����ȣ� �����첽�綯���������ܺã����ɽ�ʡ���ֲ��ϡ���ת�ӽṹ�IJ�ͬ���� ���첽�綯���ɷ�Ϊ��ʽ������ʽ���֡�
�ؼ��ʣ������첽�綯���������ṹ��������ԭ��������
Abstract:
Make motor running of three-phase asynchronous motor rotor speed is lower than the speed of the rotating magnetic field, turn son winding with the magnetic field exists between relative three-phase asynchronous motor and the induced electromotive force and current, electromagnetic torque and interact with magnetic field, the realization of energy transformation. Compared with single phase asynchronous motor, three-phase asynchronous motor operation performance is good, and all kinds of materials can be saved. According to the different rotor structure, the three phase asynchronous motor can be divided into the cage and winding type two kinds.
Key words:
three-phase asynchronous motor; The basic structure; Starting; Working principle; Speed control.
Ŀ ¼
��һ�� ����................................................2
1.1 ����................................................2
�ڶ��� �����첽�綯����������...............................3
2.1 �����첽�綯��ֱ������...............................3
2.2 ��-��������..........................................4
������ �����첽�綯������ϵͳ...............................6
3.1 ����.................................................6
3.2 �첽�綯������ϵͳ�����.............................6
������ �����첽�綯����ѹ����ϵͳ�Ĺ���ԭ��.................12
�� ��......................................................13
�����....................................................14
��һ�� �� ��
1.1 ����
��ʵ��Ӧ���У��綯����Ϊ�ѵ���ת��Ϊ��е�ܵ���Ҫ�豸��һ��Ҫ���нϸߵĻ�������ת��Ч�ʣ�����Ӧ�ܸ���������е�Ĺ���Ҫ����ƺ͵��ڵ綯������ת�ٶȡ����,���ټ���һֱ���о����ȵ㡣 ��������,ֱ���綯�����ڵ���������Խ���ڸ��˽ṹ���ӵ�ȱ��㷺��Ӧ���ڹ��̹����С�ֱ���綯���ڶת����������ʱ,�������ŵ����㶨,���øı�����ѹ�ķ���ʵ�ֺ㶨ת�ص���;�ڶת����������ʱ,���ֵ����ѹ�㶨,���øı����ŵķ���ʵ�ֺ㹦�ʵ��١����,20 ����80 �����ǰ,�ڱ��ٴ���������,ֱ������һֱռ��������λ����������,��ѧ������Ѹ�ٷ�չΪ�������ټ����ķ�չ�����˼�Ϊ�����ļ������������ʻ����������綯���ĵ���ϵͳ��������ֱͬ���綯��������һ��,���ҳɱ���ά�����ñ�ֱ���綯��ϵͳ����,�ɿ��Ը��ߡ�Ŀǰ,�����Ƚ��Ĺ�ҵ��������ֱ��������װ�û������½�����,��������Ƶ����װ�õ�������������������ձ�Ϊ��,1975 ���ڵ�������,ֱ��ռ80 %, ����ռ20 %;1985 �꽻��ռ80 %, ֱ��ռ20 % ����ĿǰΪֹ,�ձ����˸���ĵط�����������ֱ�����������,�������еĵ���ϵͳ�����ý�����Ƶװ�á� ���ı�綯���Ķ��ӵ�ѹʱ�����Եõ�һ�鲻ͬ�Ļ�е�������ߣ����ڵ綯����ת�����ѹƽ�������ȣ�������ת���½��ܶ࣬����ٷ�Χ��С��ʹһ�����͵綯������Ӧ��Ŀǰ��������ѹ��һ�������Ծ�բ�ܷ�����������˫��բ�ֱܷ��������·�У�����·�ӷ��ж��ַ���������λ���Ƹı������ѹ����ѹ����һ��������100KW���µ�������е�� ��֮�������ִ��¼����ķ�չ�������������Ƽ����ķ�չ��ΪѸ�٣������ֶβ��ϸ��£����Ʒ�ʽ�����Ż�������Ƽ�����װ���ѳ�Ϊ�ִ��������ɲ��֡�ȫ�µ����ؼ����Ѿ�ʹ���ټ����������ƣ���������Ϊ����ʹ���Ƽ��������Ƚ������������������Ͻ�������ܴ�ľ���Ч������Ч�档
һ�������첽�綯���Ļ�������
�����첽�綯��������ָ�綯����ͨ��Դ�Ӿ�ֹ״̬���ٵ�ijһ�ȶ�ת�ٵĹ��̡��綯������˲�䣬��Ϊת��ת��n=0��ת����s=1��������ת�ӵ����ϲ����ĸ�Ӧ�綯�ƺ�Ӧ���������ģ����ӵ���Ҳ��ɴﵽ�ֵ��4��7����
�첽�綯����ʱ���������������������Ӱ�죬��Ҫ���������棺
1�������ϴ����·��ѹʹ������ѹ��������Ӱ������������豸���������У�
2) ����Щ���Խϴ���ʱ��ϳ���Ϸ����ĵ綯����˵�������������ʹ�綯�������Ե���ȶ��ϻ������̵綯����ʹ��������
��ˣ����첽�綯����������������Ҫ��
1�� �����㹻�����ת�أ��Ա�֤������е�ܹ���������
2�� �ڱ�֤һ����С����ת�ص�ǰ���£��綯��������ԽСԽ�ã�
3�� ���豸����ṹ�����пɿ����������㣻
4�� ���̵��������ԽСԽ�ã���ʱ��Խ��Խ�á�
����������������Ҫ��Ҫ�����������Ƚ�С������µõ��ϴ����ת�أ���Ϊ��ת��С���ӳ���ʱ�䡣
���������첽�綯���Ļ����ṹ
1�����ӣ���ֹ���֣�
��1����������
���ã������·��һ���֣��������Ϸ��ö������顣
���죺��������һ����0.35~0.5���������о�Ե��Ĺ�� Ƭ���ơ���ѹ���ɣ������ĵ���Բ���о��ȷֲ��IJۣ�����Ƕ�Ŷ������顣
�������IJ��������¼��֣���տ��Ͳۣ��뿪���Ͳۣ������Ͳۡ�
��2����������
���ã��ǵ綯���ĵ�·���֣�ͨ�����ཻ���磬������ת�ų���
���죺�������ڿռ以��120°��Ƕȡ��ӳ����еĽṹ��ȫ��ͬ�� �����Ӷ��ɣ���Щ����ĸ�����Ȧ��һ�����ɷֱ�Ƕ���ڶ��Ӹ����ڡ�
��3���������ã��̶�����������ǰ��˸���֧��ת�ӣ����������ɢ�ȵ����á�
2��ת�ӣ���ת���֣�
��1�������첽�綯����ת�����ģ�
���ã���Ϊ�����·��һ�����Լ������IJ��ڷ���ת�����顣
��2�������첽�綯����ת������:
���ã��и����ת�ų�������Ӧ�綯�Ƽ����������γɵ��ת �ض�ʹ�綯����ת��
���죺��Ϊ����ʽת�Ӻ�����ʽת�ӡ�
3�������첽�綯������������
�˸ǣ�֧�����á�
��У�����ת�������벻�����֡�
��ж˸ǣ�������С�
���ȣ���ȴ�綯����
�ڶ��� �����첽�綯����������
2.1 �����첽�綯��ֱ������
�����첽�綯��ֱ��������ָ�綯��ֱ�ӼӶ��ѹ���ӻ�·�����κε���Ԫ��ʱ���������ص㣺�綯����������Ĺ�����ѹ��������ѹ��ȡ������첽�綯��������Ҫ����������е���첽�綯���������ܵ�Ҫ������ת��Ҫ���Ա�֤������е��������������������ʱ����������ҪС���Լ�С�Ե����ij�����������첽�綯����е���Ե���������ʽ֪���ڶ��ѹ��ֱ���������첽�綯������ת���� S=1������ͨ�ֶ��ͨ��1/2����������cos ��С������������൱�����ת�ز�����Ľ�������磬������ͨ����ʽ�첽�綯������=��4����7��IN(��������)��ת��=TN(0.9����1.3)��������ʽ�����첽�綯������ת��T S<TN ��
��������Ե��������ʹ������ѹ���ͣ��Ե��ǰ�˹����ѹ��Ӱ���ʹ�ñ�ѹ�������ѹ�����½������˶ֵ������ƫ���=±10%������ء�����,һ����Ӱ�����첽�������,����Tst���ѹ U��ƽ��������,����Tst�½�����,������ʱ�������������һ����,Ӱ����ͬһ̨�����ѹ���������������,���ƻ�䰵,�õ��豸ʧ��,���ص��첽�������ͣת�ȡ�
���������������ֱ����������ѹ����������֮�Ȳ��㹻������ת�ز�������Ҫ��
��������,�����첽���ֱ�������ֻ��Ӧ�ڹ����ѹ�������ϴ�,�綯������С��7.5kw��С��������ʽ�첽��������ڴ���������ʽ�첽���������ʽ�첽�綯���ɲ������·������� ��
��1�����Ͷ��ӵ�ѹ����2���Ӵ��Ӷ˵����翹����3����������ʽ�첽��������Բ��üӴ�ת�Ӷ˵����翹�ķ�������������ʽ�첽��������Խṹ�ϲ�ȡ��ʩ��������ת�ӵ����ĵ��裬�Ľ�ת�Ӳ��Ρ�
�ֱܽ����ȫѹ��ֱ������������������ֱ�����������������ܴ������ʲô����²���ֱ���������йع��硢�������Ŷ��й涨����Ҫȡ���ڵ綯���Ĺ����빩���ѹ��������֮��ֵ��
һ�����ж�����ѹ�����磨����ѹ���������õ磩������£�
1�����綯������Ƶ��ʱ,�綯������С�ڱ�ѹ��������20%ʱ����ֱ����������
2:���綯���������������綯������С�ڱ�ѹ��������30%ʱҲ����ֱ��������
���û�ж����ı�ѹ�����磨�����������õ�Դ��������£��綯�������Ƚ�Ƶ���������鹫ʽ�����㣬�������й�ϵ���ֱ��������
ȫѹ���������� ��
��1���첽�綯�����ʵ���7.5KW ��
��2��kfС�ڻ����1/4����3�ӵ�Դ������/�����綯������
ֱ����ʱ��Ӱ�죺�� ��
��1�������ϴɴ�������4����7 ���������ﵽ8����12���� ��
��2�������������ɵ�����ȣ�Ӱ��綯���������� ��
��3�����������ʹ�綯���ܵ��綯���ij����������ο�����ɶ�·���ջٵ綯���� ��
��4�������������ʹ������·��ѹ������ͬһ��·�е����������豸���Ӱ�졣
2.2 ��-��������
����������ʱ��������ӳ������ε�����������ʽ�첽�綯����������ʱ��ʱ�����Σ����綯��������ӽ��ת��ʱ���ڽ���������ͨ��Y-����ѹ����װ�ýӻ������������У���������������Y-����ѹ���������ڵ綯����ѹ������һ�ַ�ʽ����������ʱ��������ĵ�ѹֻ��ԭ���е�ѹ�ģ��������ؽ�Сֻ��ԭ���صģ���������������·���������ػ���������ĵ綯����
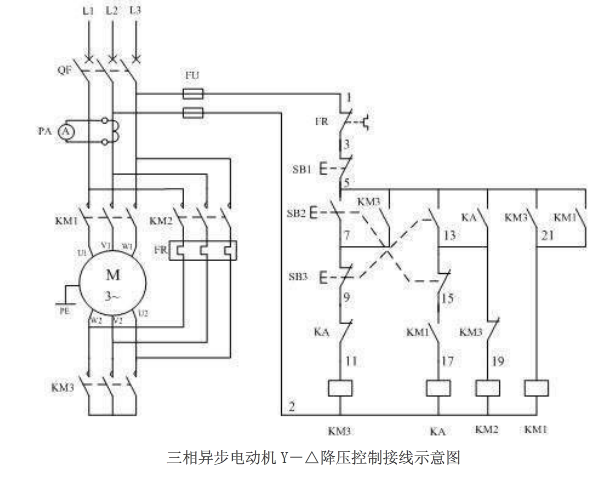
�ص㣺�����������νӷ�ʱ��������ѹΪֱ���������������νӷ���1/3��������Ϊ�����νӷ���1/3��������������Ժã���·�Ƚϼ�Ͷ���٣���������ת�����Բ���Ը���·��Ӧ�������ػ�����������ϡ�
��·�������£�
1�����Ͽ�������QF��ͨ�����Դ��
2������������ťSB2�����Ƚ����Ӵ���KM3��Ȧͨ�����ϣ�KM3����������ͷ����������β������һ��KM3�ĸ������������ͨʹ�����Ӵ���KM1��Ȧͨ�����ϣ�KM1����������ͷ�պϽ�ͨ�綯����������������ˣ��綯����Y���µ�ѹ������
3�����ŵ綯��ת�ٵ����ߣ����ӽ��ת��ʱ����۲�������ӽ������ʱ�����������а�ťSB3����ʱBS3�ij��մ���Ͽ�KM3��Ȧ�Ļ�·��KM3ʧ���ͷţ���������ͷ�ͷŽ���������β�����Ӵ�SB3�ij����ӵ��ͨ�м�̵���KA��Ȧͨ�����ϣ�KA�ij��սӵ�Ͽ�KM3��·����������KM3�ij����ӵ����ϣ�ͨ��SB2�ij��սӵ��KM1���������ӵ�ʵ���Ա���ͬʱͨ��KM3���սӵ㣨������ʹ�Ӵ���KM2��Ȧͨ�����ϣ�KM2����ͷ�պϽ��綯�������������ӳɡ���ʹ�綯���ڡ��ӷ������С������Y-����ѹ����������
4���ȼ̵���FR��Ϊ�綯���Ĺ��ر������ȼ̵���FR����Ԫ�����������ε����棬�����ȼ̵����ĵ��������������ֵʱӦ���綯��������ļ��㡣
5��KM2��KM3���մ��㹹�ɻ������ڣ���֤�˵綯��Y-���ӷ�������ͬʱ���֣����ⷢ������Դ��·�¹ʡ�
2��3 �����첽�綯��Y-����ѹ���ƽ���ʾ��ͼ��װע�����
1��Y-����ѹ������·��ֻ�����ڡ��ν��ߣ�380V�������첽�綯������������Y�ν��ߵĵ綯��ӦΪ����ʱ����Y�ν��ߣ��綯��ȫѹ��������ת���������ʱ���綯�������Ӧ��ѹ���߶��ջ١�
2������ʱӦ�Ƚ��綯�����ߺе�����Ƭ�����
3������ʱӦ�ر�ע��綯������β�˽��������д�����������д�����ͨ�����л��������ʱ�綯����ת������ʱ�綯����ת��ӦΪ�綯��ͻȻ��ת���������ջٵ綯������ɵ�բ�¹ʡ�
4�������Ҫ�����綯����ת����Ӧ�ڵ�Դ���ظ��ɲ����Դ��Ϊ�ã�����������������ɵ綯����β�˽��ߴ���
5����·��װ��������Ŀ�ģ��Ǽ��ӵ綯�������е����ģ�������������Ӧ���綯���������3��ѡ��
������ �����첽�綯������ϵͳ
3.1 ����
������Ҫ���ۺ�Ӧ����ѧ֪ʶ������첽�綯����ѹ����ϵͳ������ʵ���Ļ������ܷ������һ��ϵͳ��ѵ�����ܹ���ȫ��ع��̺�Ӧ�á��첽�綯���������١��γ�����ѧ�Ļ������ۺͻ���������
Ӧ�ó���: Ӧ���첽�綯����ѹ����ϵͳ��һ�㹤ҵ�����Լ��������û����� ϵͳ���ܽ���:��ϵͳ�������첽�綯����ת��Ϊ���ض����ݹ�ҵ���ϵľ�����Ҫ�����ڶ��ӵ�ѹ�Ե綯�����������١�
3.2 �첽�綯������ϵͳ�����
������ѹ������һ�ֱȽϼ��ĵ��ٷ������������첽�綯������ϵͳ��������������������:ת�ٵ�����(ASR)������װ��(GT)����բ�ܽ�����ѹ��(TVC)�����ٷ����(TG)�����������Լ������첽�綯��(M)��������Ҫ���������첽�綯��(M)�Ľṹ,�Ͳ��ٷ������TG������բ�ܽ�����ѹ����TVC�������������Ĵֵľ���ṹ�Լ�����ԭ����
һ�������첽�綯��
�첽�綯��(asynchronous motor) �ֳƸ�Ӧ�綯��,������϶��ת�ų���ת�������Ӧ��������ò������ת��,�Ӷ�ʵ�ֻ�������ת��Ϊ��е������һ�ֽ����綯���� �첽�綯������ת�ӽṹ��Ϊ������ʽ:������ʽ������ʽ�첽�綯���� ���綯�����е��첽���������ת����������Ǹ�Ӧ�����ģ��ֳƸ�Ӧ�綯�����첽�綯���Ǹ���綯����Ӧ����㡢��Ҫ������һ�֡����й����첽�綯�����õ���Լռ�ܸ��ɵ�60%�ࡣ
�����綯�����ر����������첽�綯�����ṹ���ɱ��ͣ�ά�����㣬���Ҽ�����ã�����С�����пɿ����Ի���Ҫ�ߣ�����ڹ�ũҵ�����еõ��˼��㷺��Ӧ�á���ͻ�����ŵ��ǣ��������ɱ��ͣ��ṹ��ά�����ף�����ʵ�ָ�ѹ���ʼ����������������ڶ��������¹��������ܻ�ú�ֱ���������ϵͳ����������õĿ������ܡ�
��ֱ�����һ���������첽�綯����ҪҲ�ɾ�ֹ�Ķ��Ӻ�ת����ת��������ɡ�������ת��֮���С�����С����϶��
�첽�綯���Ķ����ɶ������ġ���������ͻ�����������ɡ�
�����������첽�綯������ͨ��·��һ���֡�Ϊ��ʹ�첽�綯���ܲ����ϴ�ĵ��ת�أ�ϣ����һ����ǿ����ת�ų���ͬʱ������ת�ų��Զ���������ͬ��ת����ת�����������еĴ�ͨ�Ĵ�С�뷽���DZ仯�ģ������跨��������ת�ų��ڶ����������������������ĺʹ�����ģ���ˣ����������ɵ������ܽϺõ�0.5mm���ҳ���һ�����εĹ��Ƭ��ѹ���ɡ����������ϴ�(10kW����)�ĵ綯�����ڹ��Ƭ����Ϳ�Ծ�Ե�ᣬ��ΪƬ���Ե֮�á����������ϵIJ���ͨ�������֡���տڲ۪��뿪�ڲۼ����ڲۡ����ڶ�������ĵ����ò�Ш���̡���Ш���õIJ����������������������ȷǴ��Բ��ϡ�������������Ҫ�ǹ̶���֧�Ŷ������ġ���С���첽�綯��һ�㶼�������������������ݲ�ͬ����ȴ��ʽ�����ò�ͬ�Ļ�����ʽ������С�ͷ��ʽ�綯�����������ı�ɵ�����ȫ��Ҫͨ������ɢ����Ϊ�˼�ǿɢ���������ڻ�����������кܶ���ȷֲ���ɢ�Ƚ������ɢ����������ڴ������첽�綯����һ����øְ庸�ӵĻ�����
�������飬�����첽�綯��ת�ӵ����ڵĵ������ɵ�Ÿ�Ӧ���ö������ģ����������Դ��ת�����鹩�磬�����������бպϣ���������������Ϊ���ࡣ�����������ĸ�����ɵ���������ɣ���Ϊ�첽�綯����������ʱ����ת�ų���ת�ӵ��������ת�ٲ���ת������5%֮�£����Ե����еĸ�Ӧ�綯�Ʋ����絼��������֮�䲻�Ӿ�Ե���ɵ���������֮��ĽӴ����������Ƶ������©����Ҳ�ǿ��Եģ�һ�������þ�Ե���ϰѵ��������ĸ������ռ�Ϊ����������Ϳ����ɲ���ÿ��ת���еĵ��������˵Ļ��ζ˻���ɡ����ȥ�����ģ�������������ξ���һ������������ӣ����Ծ����������������ת�ӣ�ϰ���ϳ�Ϊ����ת�ӡ�����ת���ϼ����绷������Ե�����Խṹ�����췽�㡢���пɿ���
�첽�綯������ת��֮�����϶�Ǻ�С�ģ���С�͵������Ϊ0.2����2mm����϶�Ĵ�С���첽�綯�������ܹ�ϵ������϶������Ҳ�������ʱ������ͬ����С����ת�ų�����Ҫ�ϴ�����ŵ�������϶��С����ʹװ�����Ѻ���ת����ȫ����ξ�����϶��С��ӦȨ�����ף�ȫ�濼�ǡ�һ���첽�綯������϶�Խ�С��
������բ�ܽ�����ѹ����TVC����
�ṹͼ��ͼ2.1��
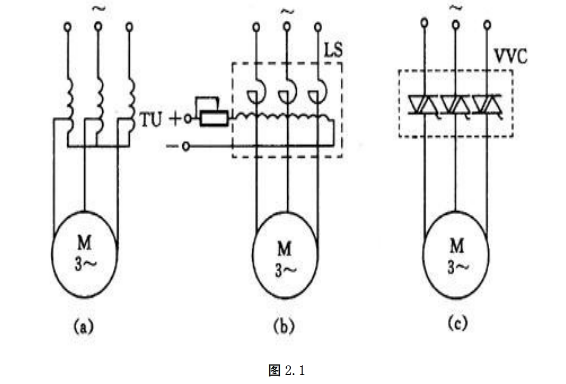
��բ�ܵ��ཻ����ѹ���������Է������ľ�բ���븺���മ����Ȼ��ӵ�������Դ�ϣ�ͨ�����ƾ�բ�ܵĵ�ͨ�ǣ����ڸ����ϵĵ�ѹ���ʣ���һװ�ó�Ϊ��բ�ܽ�����ѹ������բ�ܽ�����ѹ���ڵ�¯���¶ȿ��ơ���̨�ĵƹ���Ƽ���С�����첽�綯����ת�ٵ����еõ��㷺Ӧ�á� ������ѹ����������ǽ�����ѹ�����������ͨ����ѹ���ٽ��е�ѹ���������������ѹ����������ʽ���Ӧʽ������ѹ����ͬ�����������Ҳ��Ρ�����г�������ϴ�������Ҳ�ϵͣ��뵼ͨ���йأ���
������ѹ���ľ�բ�ܿ���ͨ���������ַ�ʽ:��
ͨ�Ͽ��ơ����Ѿ�բ����Ϊ���ؽ����ص�·���Դ��ͨ�����ܲ�,Ȼ���ٶϿ�һ���ܲ�����ͨ���ı�ͨ��ʱ��ȴﵽ��ѹ��Ŀ�ġ����ᄃբ����һ��ͨ��Ƶ�ʿɵ��Ŀ��ٿ��ص����á�
��λ���ơ�����բ����Ϊ����һ�����أ��ڵ�Դ��ѹÿһ�����У���ѡ����ʱ�̽����ص�·���Դ��ͨ���ı�ѡ����ʱ�̼��ɴﵽ��ѹ��Ŀ�ġ�
�ڽ�����ѹ���У���λ����Ӧ�õý϶࣬��������Ҫ��������λ���ƵĽ�����ѹ����
ͨ���ڴ��ʻ���Ϊ��ɶ�ijЩ���ؿ��Ʒ�ʽʱ�������ཻ����ѹ�������ཻ��
��ѹ��������ʽ�ܶ࣬��Щ��·�����ص㣬�ֱַ��������£�
��բ������ȫ�����λ������ε�ѹ��·��ͼ2.2��
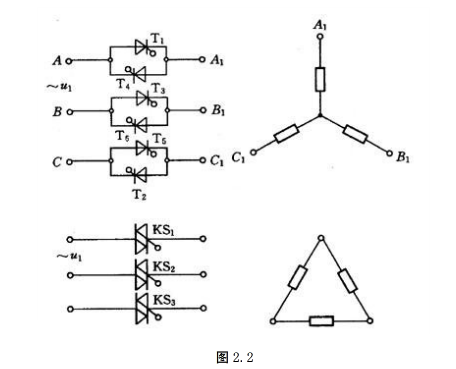
����һ�����������Ƶ���·�ṹ������������·ʱ��������ѡ������Ҫ�ĸ�����ʽ�������������λ������Ρ����ֵ�·���ӵ��ŵ�֮һ�������������г�������͡������ߵ����Գƣ����ֻ�����г��������3��г���������ˡ��������ֵ�·���ڽ�ͨѶ��·����С���Ӷ��������˲����⡣�������ֵ�·���뱣֤�����ྦྷբ��ͬʱ��ͨ�������ϲ��е���ͨ������˴������������ÿ������˫խ���壬���ΧΪ150°��
��բ���������������ε�ѹ��·����ͼ2.3��
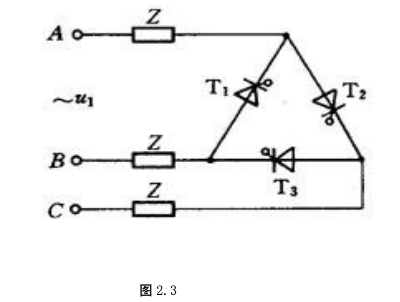
�˵�·��������բ��Ԫ���ӳ������η�ʽ�������������ӵ��е㣬���Գ�Ϊ�ǵ������ε�ѹ��·����ԭ��ͼ��ͼ��ʾ�����о�բ�ܵ����ΧΪ210������������ȴ���30°����բ�ܴ�������ΪT1��T2��T3��
�˵�·��ֻ����������բ��Ԫ������·��������Ԫ���ĵ����ԣ��ֱ��ӳ������Σ���Ϊ���Գƿ��Ʒ�ʽ���������벨�IJ��β�ͬ���������ͬ�������������������ż��г����
������������
�������Ǽ������ѹ��������-�Ǽ�ѹ������֮���õ��Ӱ뵼����������բ�ܣ��͵�Ƭ�����Ƶ����ܻ��̶Ƚϸߵ�һ�����͵����װ�ã����ҹ�����������������ѹ������
��������һ���·������ͼ2.4��
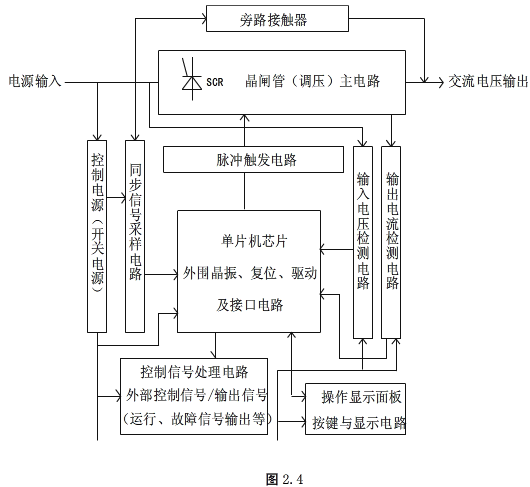
������������·��һ��Ҳ����ֻ���������ĵ���բ����ɣ��������ѹ��·�ϲ�������·�Ӵ��������������㡣��·�Ӵ���һ������û����ã��ɿ�����·������ͨ�ϣ������С�С�������������ͣ�Ҳ��װ���ڲ�������·�Ӵ����ģ���Χ������·Ҳ��Լ�
���ư����Ե�Ƭ���������CPU��Ϊ���ĵ���ģ�⼰���ּ��ɵ�·���ɵĿ��Ƶ�·������CPU�Ļ�����·��ͬ���źŵ�·�������ѹ�������������·�����崥����·�����ƶ��ӣ�ģ�⡢��������/��������źţ���·���Ϳ��Ƶ�Դ��������ʾ����·�ȵ�Ԫ��·������������1~3����·���ϡ����п��Ƶ�Դ��·��ͬ���źŲ�����·�����崥����·�������ѹ�������������ǰ����·�ᰲ����ͬһ����·���ϣ������·���ֳ�Ϊ�����壬��������·�������ѹ������������ĺ�·��������һ����·���ϣ������·���ֳ�ΪCPU���塣
������������·��ʽ��ͼ2.5��
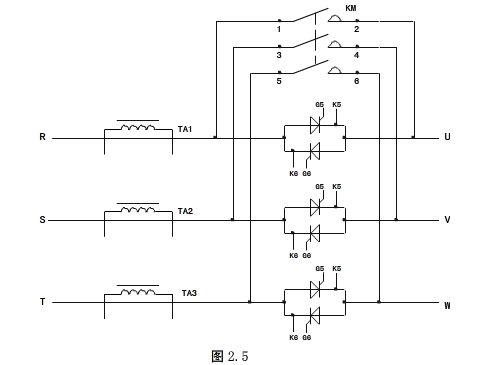
������������·��һ�����3ֻ���������ľ�բ��ģ�飬�������ཻ����ѹ�ĵ�·��ʽ����բ������·����ɿؽ�����ѹ�����̽��������Ӵ���KM�պϣ��綯���������нΣ�ͬʱ��բ������·ֹͣ�����������KM�ֳ�Ϊ��·�Ӵ�������TA1��TA2��TA3������е����źţ�������Ƶ�·���������е�����ʾ�����ر�����ͣ�������ȡ�
ͬʱ��������ͣ����ʽ��Ҳ���������֣�
1������ͣ����������ͣ��ģʽ�£��������ӵ�ֹͣ����Ͽ���·�Ӵ�������ֹ��բ�ܵĵ�ѹ�������������ع�����ͣ���������ڶ�ͣ��ʱ���ͣ��������Ҫ��ĸ����豸��
2����ͣ����������ͣ��ģʽ�£��綯���Ĺ�������·�Ӵ����л�����բ�ܵ�ѹ����������ѹ��ȫѹ��С��ʹ���ת��ƽ�Ƚ��ͣ�ֱ��ֹͣ�������ڶ�ͣ��ʱ����Ҫ�������ͣ��Ҫ��ı��ฺ�صȳ��ϡ�
������ �����첽�綯����ѹ����ϵͳ�Ĺ���ԭ��
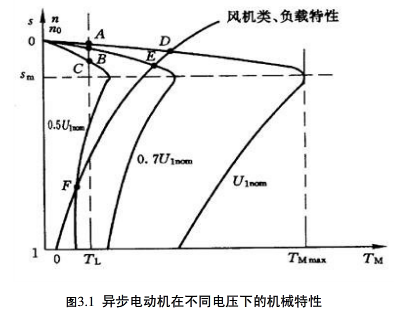
�첽�綯����ѹ���ٹ���ԭ�������첽�綯����·��������ʱ����һ��ת���£��첽�綯���ĵ��ת��TM�붨�ӵ�ѹU1��ƽ�������ȡ���ˣ��ı䶨����ӵ�ѹ�Ϳ��Ըı����е���Եĺ�����ϵ���Ӷ��ı��첽�綯����һ�����ת���µ�ת�١�
�첽�綯���ĵ��ת��Ϊ��
��
����������ת�ٻ�ת����һ��ʱ�����ת�����ѹ��ƽ�������ȡ�������ͬ��ѹ�µĻ�е���Ա�����ͼ��ʾ��ͼ3.1�б� ʾ���ѹ��
ʾ���ѹ��
�� ��
�������ȷ����������첽����Ĵ�ͳ�ļ����������������ԣ��ó����þ�բ�ܵ�ѹ������ʽ���Ի�ý�Ϊ���������Ч�������ۡ�����ͬ�ȵ������£����Ƶ�·���нϼ����Ľṹ��ϵͳ�����ɿ��Ըߣ����ַ�ʽ���Խ�С�ijɱ���ȡ�ϸߵ������ܡ�
ͨ�����ǵ��о������Եõ����½��ۣ�
1�� �����첽�綯��������������ɲ���Ϊ���� ���̶����֣� ��ת�� ���� ת���֣� ��
2����ʹ�첽�綯����ת����������ת�Ĵų��ͱպϵ�ת�����飬���� ��ת�Ĵų��ͱպϵ�ת�������ת�ٲ�ͬ����Ҳ�ǡ��첽�����ֵ� ���壻
3�������Դ�����ڿռ以��һ���ǶȰ�һ���������е���������ʱ�� ��������ת�ų���
4����ת�ų��ķ����������������е�Դ��������ģ�
5���첽�綯����������Ч�ؼ�С�綯����������
6������ʽʹ���̽�ƽ�ȣ����ؼ���û�г����
7���첽�綯���������ʺϱ�ת�ظ��غ����ص������
8������ʽ��ʹ�첽�綯�������������ӳ�������Բ�Ƶ���ĵ���϶��豸û��Ӱ�죻
9������ʽ������Ч�ؼ�С�첽�綯�������������Ϊ��С��֮���Ĺ����ѹ������������������������
Ӱ�������첽�綯���õ�Ч�ʵ������ؼ����ص�ѹ��ת���������֮�������Ϲ�ϵ����˶������첽�綯�����н��ܿ��Ƶ�������һ�������Կ������⡣���Ĵ��첽�綯���������еĽǶȳ��������ܺ���СѰ��Ŀ�깦������cos��j���Լ��������ʦ�ȷ����ѵ�����ѹU1j�������������ϵó��˿��Ʒ������ڼ���ʵ����Ҳ����ʵ���еġ�
�����
[1]����������. �Զ�����ԭ��. ����.��ѧ�����磬2000. ������
[2]����������. ������ϵ�����. ����.��е��ҵ������ ������
[3]�ο�������. ���������ϵͳ. ����.�廪��ѧ�����磬1999. ������
[4]���濵����. ��������ļ��������. ����.��ѧ�����磬1990. ������
[5]����������. ������϶�����. ����.��е��ҵ�����磬1980. ������
[6]�ܶ�������. �����������. ����.��е��ҵ������[M]��1987. ������
[7]����Ȩ����. �����϶�����.��2��. ����.ұ��ҵ�����磬2000. ��������
[8]����������. ������϶�����. ����.��е��ҵ�����磬1999. ��������
[9]��Ⱥ������. ������϶�����. ����.��е��ҵ�����磬1999. ��������
[10]�������.���ѧ. ��3��.����.��ѧ�����磬2001. ��������
[11]����������.���Ӽ���.��3��. ����.�ߵȽ��������磬2003. ��������
[12]����������.��������ѧ. ����.�й����������磬2002. ��������
[13]��һ������. �ͼ�������Ƽ���. ����.��е��ҵ�����磬1988. ��������
[14]���ٺ�����.�ͼ�������Ƽ���. ����.��е��ҵ�����磬2003. ��������
[15]̷ά�����.������������. ����.��е��ҵ�����磬1995.
-
�����첽�綯�����������
�����첽�綯�����������һʵ��Ŀ��ͨ��ʵ�������첽�綯�����͵��ٵķ�����ԤϰҪ��1�첽�綯������Щ����������ָ��2�졭
-
�����첽�綯�����������ʵ�鱨��
�����첽�綯�����������һʵ��Ŀ��ͨ��ʵ�������첽�綯�����͵��ٵķ�����ԤϰҪ��1��ϰ�첽�綯������Щ����������ָ�ꡭ
- �����첽�綯�����������ʵ�鱨��
-
ʵ���� �����첽�綯�����������
ʵ���������첽�綯�����������ָ����ʦ����ϲС���ԱԬ��ΰл��ʤ������090701226һʵ��Ŀ��ͨ��ʵ�������첽�綯�����͡�
-
�����첽�綯�����������
ʵ�����������ʽ�첽�綯�����������һʵ��Ŀ��ͨ��ʵ��������������ʽ�첽�綯�����͵��ٵķ�����ԤϰҪ��1��ϰ�첽�綯������Щ��
-
����11�����첽�綯��ʵ�鱨��
���ѧ�ۺ�ʵ�鱨���������첽�綯�������༶ѧ�Ž��մ�ѧ����ѧԺ20xx6�����첽�綯�����鷽��Ӧ���ݹ��ұ�GB103285�����졭
-
ʵ���� �����첽�綯�����������
ʵ���������첽�綯�����������һʵ��Ŀ��ͨ��ʵ�������첽�綯�����͵��ٵķ�����ԤϰҪ��1��ϰ�첽�綯������Щ����������
- �����첽�綯�����������ʵ�鱨��
-
�����첽�綯�����������ʵ�鱨��
�����첽�綯�����������һʵ��Ŀ��ͨ��ʵ�������첽�綯�����͵��ٵķ�����ԤϰҪ��1��ϰ�첽�綯������Щ����������ָ�ꡭ
-
�����첽�綯�����������
�����첽�綯�����������һʵ��Ŀ��ͨ��ʵ�������첽�綯�����͵��ٵķ�����ԤϰҪ��1�첽�綯������Щ����������ָ��2�졭