沈阳理工大学雷达技术课程设计报告
课 程 设 计 任 务 书
摘 要
雷达是一种全天时、全天候的传感器,可以安装在车辆、飞机和卫星等多种平台上,在军事和民用等方面都具有重要的应用价值,因此一直受到世界各国的高度重视。仿真是现代雷达系统设计成功的基础,从这一点来说,毫无疑问,没有任何软件比MATLAB更好。
经过改革开放几十年的发展,我国在雷达领域取得了长足的进步,特别是最近十几年,随着国家的不断投人,我国的雷达事业进人了一个快速发展的时期。X波段地基雷达(GBR)是美国国家导弹防御系统中段防御和拦截系统中最主要和最有效的目标精确跟踪和识别传感器之一,它负责中段监视和截获、预测弹道和实测弹道的精度、识别和目标分类等重要功能,对GBR的系统分析和仿真研究,探究其工作机理和识别手段,不但对于研究弹道导弹的有效突防措施和攻防对抗有着重要意义,对于发展我国自己的空间监测和弹道导弹防御系统也有着重要的参考价值。
本文介绍了运用雷达技术基础理论按所给要求设计一个简单的地基雷达系统,并介绍所运用的相关原理及对相关结果分析和改进。
关键词:MATLAB;地基雷达;系统仿真;功率孔径积;计算机辅助教学
目 录
1.课程设计目的........................................ 1
2.课程设计要求........................................ 1
3.相关知识............................................ 1
3.1地基雷达........................................ 1
3.2地基雷达的工作原理............................... 2
4.课程设计分析........................................ 4
4.1地基雷达的实现.................................. 4
4.2参数设置........................................ 4
5.程序代码............................................ 5
6.运行结果及分析...................................... 6
7.参考文献............................................ 8
基于Matlab的地基雷达设计
1.课程设计目的
(1)加深对雷达技术基本理论知识的理解。
(2)培养独立开展科研的能力和编程能力。
(3)掌握简单地基雷达的组成及应用。
2.课程设计要求
设计一部地基雷达,能够检测高度分别为10km和2km的飞机和导弹。对每种目标类型的最大探测距离是60km。假定飞机的平均RCS是6dBsm,导弹的平均RCS是-10dBm。导弹雷达的方位角和俯仰角搜索范围分别是 和
和 。所要求的扫描速率是2s,距离分辨率是150m。假定噪声系数F=8dB,总的损失因子是L=10dB。使用方位波束宽度小于
。所要求的扫描速率是2s,距离分辨率是150m。假定噪声系数F=8dB,总的损失因子是L=10dB。使用方位波束宽度小于 的扇形波束。SNR是15dB。
的扇形波束。SNR是15dB。
3.相关知识
对雷达截面积,雷达损失,灵敏度,扫描时间,检测距离,搜索区域,功率孔径积等有关雷达技术的基础理论及知识点。
3.1地基雷达
由分置于不同基地的一部或多部发射机和一部或多部接收机(接收机与发射机的数量不必相等)组成的统一的雷达系统。双基地雷达是多基地雷达中最简单的一种。早期的雷达主要是双基地形式,即发射机与接收机放置在不同地点。1936年,美国海军研究实验室研制成天线收发开关(见天线开关管),单基地雷达遂逐步取代了双基地雷达而成为常用的雷达形式。到50年代初,双基地和多基地雷达系统重新受到人们的重视。多基地雷达可有多种组成形式。
3.2地基雷达的工作原理
雷达系统必须要实现的第一个任务是连续地扫描特定的空间区域以搜索感兴趣的目标,一旦建立起检测,目标信息如距离、角位置及可能的目标速度就可以从雷达信号和数据处理器中提取出来。根据雷达的设计和天线的类型,可以采用不同的搜索模式。二维(2D)扇形波形搜索模式如图3.1所示。此时,俯仰方向的波束宽度足够宽,以覆盖沿着此坐标的想要搜索的区域。然而,天线必须在方位向扫描。图3.2所示的是堆积波束搜索模式。这时,波束必须在方位向和俯仰向扫描。后一种搜索模式通常被相控阵雷达采用。

图3.1 2D扇形搜索模式 图3.2 堆积搜索模式
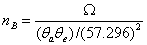
搜索区域通常用以球面度表示的搜索立体角Ω来规定。定义方位向和俯仰向的雷达搜索区域范围为 和
和 。相应地,搜索区域的计算为
。相应地,搜索区域的计算为
 球面波 (3.3)
球面波 (3.3)
其中,和都以角度给出。雷达天线的3dB波束宽度可以分别按照它的方位向和俯仰向宽度 和
和 表示。那么,天线的立体角覆盖范围就是
表示。那么,天线的立体角覆盖范围就是 ,因此,覆盖立体角Ω所要求的天线波束位置数
,因此,覆盖立体角Ω所要求的天线波束位置数 为
为
 (3.4)
(3.4)
为了开发搜索雷达方程,由
(3.5)
使用关系式 和
和 ,其中T是PRI,
,其中T是PRI, 是脉冲宽度,得到
是脉冲宽度,得到
(3.6)
 将雷达扫描由立体角Ω定义的区域所花费的时间定义为扫描时间
将雷达扫描由立体角Ω定义的区域所花费的时间定义为扫描时间 。那么,辐射到目标的时间可以根据表示为
。那么,辐射到目标的时间可以根据表示为
(3.7)
 假设在单次扫描期间,每个PRI每个波束只有一个波束照射到目标,则
假设在单次扫描期间,每个PRI每个波束只有一个波束照射到目标,则 ,所以式(3.6)可以写为
,所以式(3.6)可以写为
(3.8)
 进一步整理得
进一步整理得
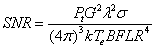
(3.9)()
式(3.9)中的值 称为功率孔径积。实际上,功率孔径积广泛用于对雷达实现其搜索任务的能力分类。通常,对于由Ω定义的给定的搜索区域,功率孔径积的计算要满足预定的SNR和雷达截面积。
称为功率孔径积。实际上,功率孔径积广泛用于对雷达实现其搜索任务的能力分类。通常,对于由Ω定义的给定的搜索区域,功率孔径积的计算要满足预定的SNR和雷达截面积。
作为一种特殊情况,假定雷达使用直径为D的圆径孔(天线)。天线的3dB波束宽度 为
为
 (3.10)
(3.10)
当使用锥形孔径时 。将(3.10)代入式(3.4),得到
。将(3.10)代入式(3.4),得到
 (3.11)
(3.11)
 对于这种情况,扫描时间和辐射到目标的时间的关系为
对于这种情况,扫描时间和辐射到目标的时间的关系为
(3.12)
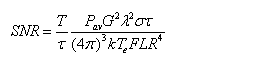
将式(3.12)代入式(3.6),得到

(3.13)
可以定义圆孔径的搜索雷达方程为
(3.14)
其中,使用了关系式 (孔径面积)。
(孔径面积)。
4.课程设计分析
4.1地基雷达的实现
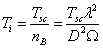
 距离分辨率的需求是
距离分辨率的需求是 m,因此通过使用式
m,因此通过使用式 计算所要求的脉冲宽度是
计算所要求的脉冲宽度是 ,或者等效为要求带宽是B=1MHz。问题的陈述有助于以功率孔径积确定雷达的大小。为此,必须先计算出在满足要求的检测距离上的最大搜索区域。雷达搜索区域为
,或者等效为要求带宽是B=1MHz。问题的陈述有助于以功率孔径积确定雷达的大小。为此,必须先计算出在满足要求的检测距离上的最大搜索区域。雷达搜索区域为
在此,准备使用雷达搜索方程(3.9)计算功率孔径积。为此。可以修改MATLAB函数“power_aperture.m”来计算,并且画出两种类型的功率孔径积。最后开发了MATLAB程序“GBR_case.m”,在第五节中给出程序代码。使用表5.1中的参数作为这个程序的输入,注意 =290K是任意选择的。
=290K是任意选择的。
4.2参数设置

表5.1 MATLAB程序“GBR_case.m”的输入参数
5.程序代码
程序如下:
clear all
close all
snr = 15.0; % Sensitivity SNR in dB
tsc = 2.; % Antenna scan time in seconds
sigma_tgtm = -10; % Missile RCS in dBsm
sigma_tgta = 6; % Aircraft RCS in dBsm
range = 60.0; % Sensitivity range in Km,
te = 290.0; % Effective noise temprature in Kelvins
nf = 8; % Noise figure in dB
loss = 10.0; % Radar losses in dB
az_angle = 360.0; % Search volume azimuth extent in degrees
el_angle = 10.0; % Search volume elevation extent in degrees
c = 3.0e+8; % Speed of light
% Compute Omega in steradians
omega = (az_angle / 57.296) * (el_angle /57.296);
omega_db = 10.0*log10(omega); % Convert Omega to dBs
k_db = 10.*log10(1.38e-23);
te_db = 10*log10(te);
tsc_db = 10*log10(tsc);
factor = 10*log10(4*pi);
rangemdb = 10*log10(range * 1000.);
rangeadb = 10*log10(range * 1000.);
PAP_Missile = snr - sigma_tgtm - tsc_db + factor + 4.0 * rangemdb + ...
k_db + te_db + nf + loss + omega_db
PAP_Aircraft = snr - sigma_tgta - tsc_db + factor + 4.0 * rangeadb + ...
k_db + te_db + nf + loss + omega_db
index = 0;
% vary rnage from 2Km to 90 Km
for rangevar = 2 : 1 : 90
index = index + 1;
rangedb = 10*log10(rangevar * 1000.0);
papm(index) = snr - sigma_tgtm - tsc_db + factor + 4.0 * rangedb + ...
k_db + te_db + nf + loss + omega_db;
missile_PAP(index) = PAP_Missile;
aircraft_PAP(index) = PAP_Aircraft;
papa(index) = snr - sigma_tgta - tsc_db + factor + 4.0 * rangedb + ...
k_db + te_db + nf + loss +omega_db;
end
var = 2 : 1 : 90;
figure (1)
plot (var,papm,'k',var,papa,'k-.')
legend ('Missile','Aircraft')
xlabel ('Range - Km');
ylabel ('Power Aperture Product - dB');
hold on
plot(var,missile_PAP,'k:',var,aircraft_PAP,'k:')
grid
hold off
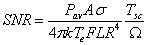
6.运行结果及分析
图6.1显示了这个程序产生的输出图形。这个同样的程序也计算了导弹和飞机对应的功率孔径积,它们也可以从这幅图上读出。


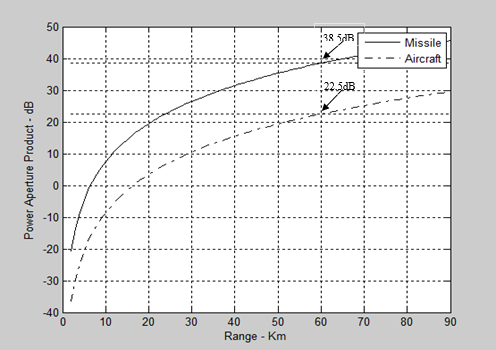
图6.1 地基雷达的功率孔径积相对检测距离
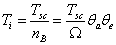
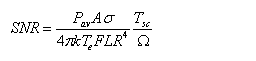
选择更严格的情况作为设计基准(即选择导弹的分析结果作为功率孔径积),得到 ,选择
,选择 计算平均功率为,假定孔径效率为
计算平均功率为,假定孔径效率为 得到物理孔径面积。更准确的表示为
得到物理孔径面积。更准确的表示为 使用
使用 作为雷达的工作频率。然后,利用计算得到G=29.9dB。现在必须确定天线的方位波束宽度。回想到天线增益也是通过如下关系与天线3dB波束宽度相联系的:
作为雷达的工作频率。然后,利用计算得到G=29.9dB。现在必须确定天线的方位波束宽度。回想到天线增益也是通过如下关系与天线3dB波束宽度相联系的: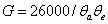 ,其中,(,)分别是天线的3dB方位和俯仰波束宽度。假定为
,其中,(,)分别是天线的3dB方位和俯仰波束宽度。假定为 的扇形,得到
的扇形,得到 即
即 。
。
7.参考文献
[1] 丁鹭飞 陈建春.雷达原理.电子工业出版社,2009.3
[2] 巴塞姆·马哈夫扎.雷达系统设计MATLAB仿真.电子工业出版社,2009.10
[3] 穆尔. MATLAB实用教程(第2版).电子工业出版社,2010.1
[4] 梅利尔·斯科尼克.雷达系统导论.电子工业出版社,2012.5
[5] 理查兹.雷达信号处理基础.电子工业出版社,2008.6
[6] 斯科尼克.雷达手册.电子工业出版社,2010.7
-
课程设计报告
1课程设计目的课程设计是船舶设计原理课程重要的实践性教学环节是培养学生掌握船舶设计基本原理和能力的技术基础主尺度论证与总布置设计是…
-
课程设计报告内容
一设计目的1强化上机动手能力在理论和实践的基础上进一步巩固数据结构课程学习的内容掌握工程化软件设计的基本方法2掌握图的创建和应用3…
-
课程设计报告
中国计量学院信息工程学院课程设计报告课程设计名称系统设计与仿真课程计二级学院信息工程学院专业班级10电信2班学姓成绩号名10003…
-
课程设计报告模板
信息科学与工程学院高级语言程序设计课程设计报告学生成绩管理系统学科专业计算机科学与技术班级1301学号指导教师唐郑熠讲师学生二零年…
-
课程设计报告
扬州大学数据结构课程设计报告课题名称姓名学院系科班级指导老师日期自来水管架设问题广陵学院陈宏建1一课程设计的题目自来水管理架设问题…
-
数字电路课程设计-多功能数字时钟设计报告
多功能数字时钟设计报告目录一设计任务和要求2二设计的方案的选择与论证21总体电路分析22仿真分析33仿真说明3三电路设计计算与分析…
-
曾明GIS集成与开发课程设计报告
课程设计说明书题目GIS集成与开发院系测绘学院专业班级地理信息系统111班学号20xx305418学生姓名曾明指导教师赵明松老师2…
-
中国石油大学电力电子课程设计报告
电力电子课程设计单端反激多路开关电源电力电子技术课程设计单端反激两路输出开关电源题目单端反激式多路输出开关电源设计学院信息与控制工…
-
哈夫曼编码课程设计报告
数据结构课程设计报告基于哈夫曼树的文件压缩解压程序专业班级信科2班姓名徐爱娟谢静学号20xx161431005120xx16143…
-
java课程设计报告-俄罗斯方块
JAVA程序设计课程设计之俄罗斯方块学院:计算机年级:09级班级:网络工程1班指导老师:小组成员:时间:20##年12月15日目录…