实验(四)机构运动方案创新设计实验报告1


实 验 报 告
(机构运动方案创新设计实验)
实验课程:
学生姓名:
学 号:
专业班级:
年 月 日
 南昌大学实验报告
南昌大学实验报告
学生姓名: 学 号: 专业班级:
实验类型:□ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:
一、实验名称
二、实验目的
三、实验设备及工具
四、实验原理
五、实验方法与步骤
六、实验结果
1、所拼接的机构运动简图
2、进行机构的结构分析,并分析其运动的可能性和确定性
第二篇:实验22机构运动方案创新设计实验
实验22 机构运动方案创新设计实验
一、概述
机构运动方案创新设计是各类复杂机械设计中决定性的一步,机构的设计选型一般先通过作图和计算来进行,一般比较复杂的机构都有多个方案,需要制作模型来试验和验证,多次改进后才能得到最佳的方案和参数。本实验所用搭接试验台基本能够任意选择平面机构类型,组装调整机构尺寸等功能,能够比较直观、方便的搭接、验证、调试、改进、确定设计方案,较好地改善了在校学生对平面机构的学习和设计一般只停留在理论设计“纸上谈兵”的状况。
二、实验目的
1.加深对平面机构的组成原理的认识,进一步了解机构的组成及其运动特性。
2.掌握机构创新模型的使用方法及实验原理。
3.训练学生的工程实践动手能力,培养学生创新意识及综合设计的能力。
三、实验内容及要求
1.
四、实验原理
任何平面机构均可以用零自由度的杆组依次连接到原动件和机架上去的方法来组成是机构的组成原理,也是本实验的基本原理。
杆组的概念、正确拆分杆组及拼装杆组。
1.杆组的概念
由于平面机构具有确定运动的条件是机构的原动件数目与机构的自由度数目相等,因此机构均由机架、原动件和自由度为零的从动件系统通过运动副联接而成。将从动件系统拆成若干个不可再分的自由度为零的运动链,称为基本杆组,简称杆组。
根据杆组的定义,组成平面机构杆组的条件是: 。其中构件数n,高副数
。其中构件数n,高副数 和低副数
和低副数 都必须是整数。由此可以获得各种类型的杆组。
都必须是整数。由此可以获得各种类型的杆组。
最简单的杆组为 ;
; ,称为II级组,由于杆组中转动副和移动副的配置不同,II级杆组共有五种形式如图22-1所示。
,称为II级组,由于杆组中转动副和移动副的配置不同,II级杆组共有五种形式如图22-1所示。
 图22-1 平面低副II级杆组
图22-1 平面低副II级杆组
III级杆组形式较多,其中 ,图22-2所示为机构创新模型已有的几种常见的III级杆组。
,图22-2所示为机构创新模型已有的几种常见的III级杆组。
 图22-2平面低副III级杆组
图22-2平面低副III级杆组
2.正确拆分秆组
正确拆分杆组的三个步骤:
(1)先去掉机构中的局部自由度和虚约束,有时还要将高副加以低代。
(2)计算机构的自由度,确定原动件。
(3)从远离原动件的一端(即执行构件)先试拆分Ⅱ级杆组,若拆不出Ⅱ级组时,再试拆Ⅲ级杆组,即由最低级别杆组向高一级杆组依次拆分,最后剩下原动件和机架。
正确拆组的判定标准是:拆去一个杆组或一系列杆组后,剩余的必须仍为一个完整的机构或若干个与机架相联的原动件,不许有不成组的零散构件或运动副存在,否则这个杆组拆得不对。每当拆出一个杆组后,再对剩余机构拆杆组,并按第(3)步骤进行,直到全部杆组拆完,只应剩下与机架相联的原动件为止。
3.正确拼装杆组
根据拟定的机构运动学尺寸,利用机构运动创新方案实验台提供的零件按机构运动传递
顺序进行拼接。拼接时,首先要分清机构中各构件所占据的运动平面,并且使各构件的运动在相互平行的平面内进行,其目的是避免各运动构件发生干涉。然后,以实验台机架铅垂面为拼接的起始参考面,所拼接的构件以原动构件起始,依运动传递顺序将各杆组由里(参考面)向外进行拼接。
四、实验设备及功用
机构运动方案创新设计实验台设备包括机架及其组件,分别详述如下。
实验台机架如图22-3所示:机架中有5根铅垂立柱,它们可沿x方向移动。移动时请用双手推动、并尽可能使立柱在移动过程中保持铅垂状态。立柱移动到预定的位置后,用螺栓将立柱上、下两端锁紧(*安全注意事项:不允许将立柱上、下两端的螺栓卸下,在移动立柱前只需将螺栓拧松即可)。立柱上的滑块可沿y方向移动。将滑块移动到预定的位置后,用螺栓将滑块紧定在立柱上。按图示方法即可在x、y平面内确定一个固定点,这样活动构件相对机架的连接位置就确定了。
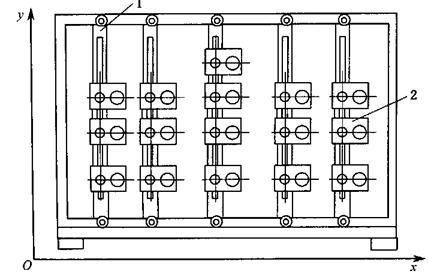
图22—3 实验台机架
1一沿x方向移动的立柱;2—沿y方向移动的滑块
2.其他组件
1)凸轮和高副锁紧弹簧 凸轮基圆半径为18mm,从动推杆的行程为30mm。从动件为正弦加速度运动规律;凸轮与从动件的高副形成是依靠弹簧力的锁合,各4件。
2)齿轮 模数2,压力角200,齿数分别为34和42,两齿轮中心距为76mm。各4件。
3)齿条 模数2,压力角200,单根齿条全长为422m,为4件。
4)槽轮拨盘 两个主动销,为4件。
5)槽轮 四槽,为1件。
6)主动轴 动力输入用轴,轴上有平键槽。L为5mm、20mm、35mm、50mm各4件,L为65mm,为2件。
7)转动副轴(或滑块) 主要用于跨层面(即非相邻平面)的转动副或移动副的形成。L
为5mm、15mm、30mm分别为6件、4件、3件。
8)扁头轴 又称从动轴,轴上无键槽,主要起支撑及传递运动的作用。L为5mm、
20mm、35mm、50mm、65mm,分别为16件、12件、12件、10件和8件。
9)主动滑块插件 与主动滑块座固联,可组成做直线运动的主动滑块。L为40mm、
55mm,各一件。
10)主动滑块座 与直线电机齿条固连形成主动件,且随直线电机齿条作往复直线运动。
11)连杆(或滑块导向杆) 其长槽与滑块形成移动副,其圆孔与轴形成转动副。L为50mm、100mm、150mm、200mm、250mm、300mm、350mm,各8件。
12)压紧连杆用特制垫片 将连杆固定在主动轴或固定轴上时用。 为16件。
为16件。
13)转动副轴(或滑块)与固定轴块配用时可在连杆长槽的某一选定位置形成转动副或做滑块。L为5mm、20mm,各8件。
14)转动副轴(或滑块) 用于两构件形成转动副或作滑块用,为16件。
15)带垫片螺栓 转动副轴与连杆之间构成转动副或移动副时用带垫片螺栓连接,用于加长转动副轴或固定轴的轴长,规格M6,为48件。
16)压紧螺栓 转动副轴或固定轴与连杆形成同一构件时用该压紧螺栓连接,规格M6,为48件。
17)运动构件层面限位套 用于不同构件运动平面之间的距离限定,避免发生运动构件间的运动干涉。L为5mm、15mm、30 mm、45 mm、60 mm,分别35件、40件、20件、20件、10件。
18)带轮 大孔轴,用于旋转电机,为3件。
19)主动轴带轮 小孔轴,用于主动轴,为3件。
20)盘杆转动轴 盘类零件或与其他构件(如连杆)构成转动副时用。L为20mm、35mm、45mm,分别为6件、6件、4件。
21)固定转轴块 用螺栓将固定转轴块锁紧在连杆长槽上,构件可与该连杆在选定位置形成转动副,为8件。
22)加长连杆和固定凸轮弹簧用螺栓、螺母 用于两杆加长时锁紧的连接件,固定弹簧,M10,各为18件。
23)曲柄双连杆部件 偏心轮与活动圆环形成转动副,且已制作成一组合件,为4件。
24)齿条导向板 将齿条夹紧在两块齿条导向板之间,可保证齿轮与齿条的正常啮合,为8件。
25)转动副轴(或滑块) 轴的扁头主要用于两构件形成转动副;轴的圆头主要用于两构件形成移动副,或做滑块时用,为16件。
26)安装电机座行程开关座用内六角螺栓、平垫 标准件 ,
, ,各32件。
,各32件。
27)内六角螺钉 标准件 ,为2件,用于将主动滑块固定在直线电机齿条上。
,为2件,用于将主动滑块固定在直线电机齿条上。
28)内六角螺钉 标准件 ,为18件。
,为18件。
29)滑块 已与架相连支撑轴,并在机架平面内沿铅垂方向上下移动,为64件。
30)压紧立柱特制平垫 已与机架相连,用于固定立柱。 ,为40件。
,为40件。
31)固定立柱上滑块用特制螺母 已与机架相连,M6,为64件。
32)固定电机用特制螺母 卡在机架的长槽内,可轻松拧紧螺栓固定电机座,为18件。
33)行程开关支座 2件,并配内六角头螺栓平垫, ,
, ,各4件。用于行程开关与其座的连接,行程开关的安装高度可在长孔内进行调节。
,各4件。用于行程开关与其座的连接,行程开关的安装高度可在长孔内进行调节。
34)平垫片 使轴相对机架不转动时用, ,为20件。
,为20件。
35)防脱螺母 防止轴从机架上脱出,M12,为76件。
36)转速电机座 已与电机相连,为3件。
37)直线电机座 已与电机相连,为1件。
38)平键 主动轴与带轮的连接, ,为20件。
,为20件。
39)直线电机控制器 与行程开关配用,可控制直线电机的往复运动行程。前面板为LED显示方式,当控制器的前面板与操作者是面对面的位置关系时,控制器上的发光管指示直线电机齿条的位移方向。控制器的后面板上置有电源引出线及开关,与直线电机相连的4芯插座、与行程开关相连的5芯插座和2A保险管,为1件。
40)带 标准件,O型,为3件。
41)直线电机 10mm/s,10r/min。直线电机安装在实验台机架底部,并可沿机架底部的长形槽移动电机。直线电机的长齿条为机构输入直线运动的主动件。在实验中,允许齿条单方向的最大直线位移为300mm,可根据主动滑块的位移量确定直线电机两行程开关的相对间距,并且将两行程开关的最大安装间距限制在300mm范围内。
直线电机控制器使用注意事项:根据主动滑块移动的距离,通过改变离直线电机较远的行程开关,来调节齿条(相当于滑块)往复运动行程,其可调节的最大行程不得大于400mm。
故障排除 当接通电源开关,电机不运行,可能是前面板上保护电机的熔断器(2.5A)烧断。及时告诉指导教师更换新的2.5A熔断器。
*注意:未拼接机构运动前、预设直线电机的工作行程后,请务必调整直线电机行程开关的高度,以确保电机行程开关的灵活动作,从而防止直线电机齿条脱离电机主体,防止组装零件的损坏及人身安全。
3.工具
提供M5、M6、M8内六角扳手各2件、150mm~200mm活动扳手各1件、1m卷尺、纸张自带。
五、实验步骤
1)掌握实验原理。
2)熟悉机构组合创新实验台使用方法。
3)选择实验教师提供的机构运动方案或课前自拟机构运动方案作为机构组合实验内容。
4)将拟定的机构运动方案根据机构组成原理按杆组进行正确拆分,并用机构简图表示
出来。
5)正确拼装杆组机构运动方案。
6)完成实验报告。
-
机构运动方案创新设计的实验报告
机构运动方案创新设计的实验报告一概述机构运动方案创新设计是各类复杂机械设计中决定性的一步机构的设计选型一般先通过作图和计算来进行一…
-
机构运动方案创新设计实验报告
机构运动方案创新设计实验报告一实验报告1绘制实际拼装的机构运动方案简图并在简图中标识实测所得的机构运动学尺寸2简要说明机构杆组的拆…
-
机构运动方案创新设计实验指导书-学生用-cxc
机构运动方案综合设计实验指导书一实验目的1培养学生机构型综合的设计能力创新能力和实践动手能力2培养学生综合应用所知识对机构的结构和…
-
机械运动方案创新设计实验报告
机械运动方案创新设计实验一实验目的1加深对平面连杆机构及其设计的理解2初步了解机构设计的基本原理及各连杆机构的运动特性3学会用实验…
-
机械运动方案创新设计实验
机械运动方案创新设计实验一实验目的1加深对机构设计原理的认识进一步了解并掌握机构的组成及其运动特性2熟悉ZBSC机构运动创新实验台…
-
机械运动方案创新设计实验报告
机械运动方案创新设计实验一实验目的1加深对平面连杆机构及其设计的理解2初步了解机构设计的基本原理及各连杆机构的运动特性3学会用实验…
-
机构运动方案创新设计的实验报告
机构运动方案创新设计的实验报告一概述机构运动方案创新设计是各类复杂机械设计中决定性的一步机构的设计选型一般先通过作图和计算来进行一…
-
平面机构运动方案设计与拼装 实验报告
平面机构运动方案设计与拼装实验报告一实验目的1加深学生对机构组成原理的认识进一步理解平面机构的组成及其运动特性2通过平面机构拼装训…
-
机构运动方案创新设计实验报告
机构运动方案创新设计实验报告一实验报告1绘制实际拼装的机构运动方案简图并在简图中标识实测所得的机构运动学尺寸2简要说明机构杆组的拆…
-
机原实验--机械运动方案创新设计实验3实验报告
本次实验的要求全班共分为八组每组设计一至二个方案实验地点实验中心北楼202陈老师20xx1223机械运动方案创新设计实验一实验目的…