智能控制实验报告
《智能控制》 课程实验报告
实验题目:模糊控制器设计与实现
一、 实验目的
1.掌握模糊控制系统的设计方法;
2.比较常规控制与模糊控制的优缺点;
3.训练Matlab程序设计能力。
二、 实验内容
1.针对一个二阶系统,分别设计模糊控制器和常规控制器;
2.分别PID控制和模糊控制两种情况下系统阶跃响应;
3.对实验结果进行对比分析。
三、 实验设备
计算机 1台
Window XP操作系统
Matlab 6.5软件
四、 实验原理
1、 模糊控制
 模糊逻辑控制又称模糊控制,是以模糊集合论,模糊语言变量和模糊逻辑推理为基础的一类计算机控制策略,模糊控制是一种非线性控制。图1-1是模糊控制系统基本结构,由图可知模糊控制器由模糊化,知识库,模糊推理和清晰化(或去模糊化)四个功能模块组成。
模糊逻辑控制又称模糊控制,是以模糊集合论,模糊语言变量和模糊逻辑推理为基础的一类计算机控制策略,模糊控制是一种非线性控制。图1-1是模糊控制系统基本结构,由图可知模糊控制器由模糊化,知识库,模糊推理和清晰化(或去模糊化)四个功能模块组成。
针对模糊控制器每个输入,输出,各自定义一个语言变量。因为对控制输出的判断,往往不仅根据误差的变化,而且还根据误差的变化率来进行综合评判。所以在模糊控制器的设计中,通常取系统的误差值e和误差变化率ec为模糊控制器的两个输入,则在e的论域上定义语言变量“误差E” ,在ec的论域上定义语言变量“误差变化EC” ;在控制量u的论域上定义语言变量“控制量U” 。
通过检测获取被控制量的精确值,然后将此量与给定值比较得到误差信号e,对误差取微分得到误差变化率ec,再经过模糊化处理把分明集输入量转换为模糊集输入量,模糊输入变量根据预先设定的模糊规则,通过模糊逻辑推理获得模糊控制输出量,该模糊输出变量再经过去模糊化处理转换为分明集控制输出量。
2、 PID控制
在模拟控制系统中,控制器最常用的控制规律是PID控制。PID控制器是一种线性控制器。它根据给定值与实际输出值之间的偏差来控制的。其传递函数的形式是: ,PID控制原理框图如图1-2所示。
,PID控制原理框图如图1-2所示。
式中 ——比例系数;
——比例系数; ——积分时间常数;
——积分时间常数; ——微分时间常数。
——微分时间常数。

PID控制器各环节的作用如下:
(1)、比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减小偏差。增大比例系数一般将加快系统的响应,在有静差的情况下有利于减小静差,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。
(2)、积分环节:主要消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数,越大,积分作用越弱,反之越强。增大积分时间有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长。
(3)、微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。增大微分时间D有利于加快系统的响应速度,使系统超调量减小,稳定性增加,但系统对扰动的抑制能力减弱。
五、 实验步骤
(1)、 在Simulink中选择相应器件搭建PID和模糊控制仿真图形,设置各单元参数。结果如下所示:

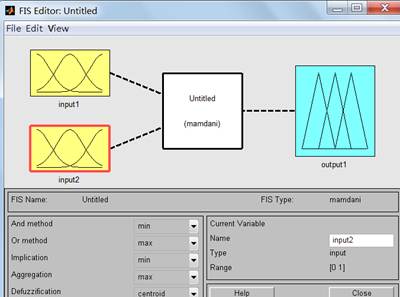
(2)、 在MATLAB 6.5命令窗口输入“fuzzy”,打开FIS 编辑器,编辑结果如下所示:

e
ec

U

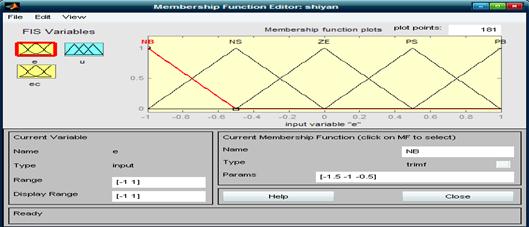
(3)、双击输入或输出的图标打开隶属函数编辑器,设置输入输出变量范围和波形。双击FIS编辑器中间的图标打开规则编辑器,根据系统传递函数和调节要求设置模糊规则。将模糊控制规则导入仿真图形中的模糊逻辑控制器,编译运行,并根据系统传递函数和调节要求调试PID参数及模糊控制器,直到满足要求。

保存模糊规则设计,导入到Workspace。
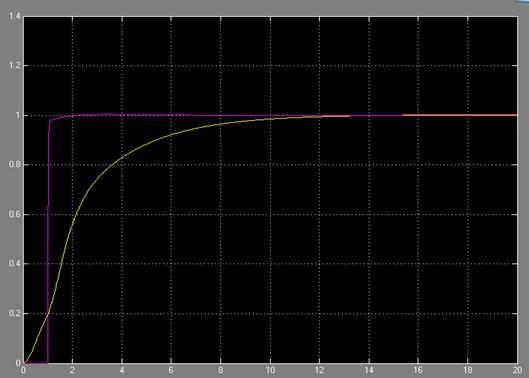
(4)、把设计的模糊规则导入到仿真图形中的模糊控制模块中,运行。观察PID控制输出波形和模糊控制输出波形,比较PID控制与模糊控制的优缺点。
六、 实验结果
被控对象传递函数:

七、 结果分析
由实验得到的波形图可以看出,模糊控制与传统PID控制比较结果如下:(1)PID控制器相对比较简单,而模糊控制器设计较为复杂,不仅要设计变量还要设计模糊规则;(2)从图中可以看出,模糊控制器的动作反应较快,在0时刻就有控制效果,但是其调节时间相对于PID控制器要长一些,所以模糊控制器应该应用于系统控制的处于较小稳定波动的时段,而PID应应用于系统存在较大稳态误差的阶段;(3)模糊控制器更接近人的思维,简单明了,而PID是利用控制经验总结和数学算法综合出来的一种控制规则,有点抽象。(4)模糊控制器与神经网络、专家系统、自学习系统等相结合都能得到较好的控制效果,发展和应用范围越来越广。
八、 教师评语
第二篇:智能控制实验报告1
智能控制实验报告
实验题目:模糊控制器设计
学 院:电气工程学院
班 级:
姓 名:
学 号:
实验题目:模糊控制器设计
实验目的:1、熟悉和掌握模糊控制器的结构、原理及应用;
2、熟练应用MATLAB软件,进行模糊控制的Matlab仿真。
实验原理:在Simulink环境下对PID控制系统进行建模:对模糊控制系统的建模关键是对模糊控制器的建模。Matlab软件提供了一个模糊推理系统(FIS)编辑器,只要在Matlab命令窗口键入Fuzzy就可进入模糊控制器编辑环境。模糊推理系统编辑器用于设计和显示模糊推理系统的一些基本信息,如推理系统的名称,输入、输出变量的个数与名称,模糊推理系统的类型、解模糊方法等。
实验仪器:计算机 MATLAB软件
实验步骤:打开模糊推理系统编辑器,在MATLAB的命令窗(command window)内键入:fuzzy命令,弹出模糊推理系统编辑器界面,如下图所示:

在FIS编辑器界面上,执行菜单命令“Edit”-> “Add Variable” ->“Input”,加入新的输入input,如下图所示 :
选择input(选中为红框),在界面右边文字输入处键入相应的输入名称,例如温度输入用tmp-input,磁能输入用mag-input,如下图所示:

双击所选input,弹出一新界面,在左下Range处和Display Range处,填入取值范围,例如0至9(代表0至90);
在右边文字输入Name处,填写隶属函数的名称,例如lt或LT(代表低温);
在Type处选择trimf(意为:三角形隶属函数曲线,triangle member function)
在Params(参数)处,选择三角形涵盖的区间,填写三个数值,分别为三角形底边的左端点、中点和右端点在横线上的值
如下图中所示:
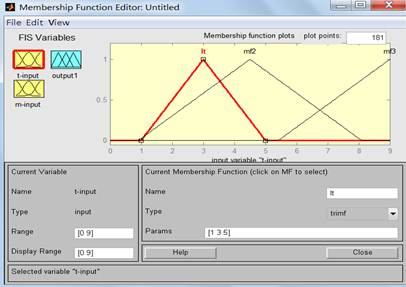
用鼠标左键双击输入变量,弹出输入变量的隶属函数编辑器,执行菜单命令“Edit”-> “Remove All MFs”,然后执行菜单命令“Edit”-> “Add MFs”,弹出“Membership Function”对话框,将隶属函数的类型设置为“trimf”,并修改隶属函数的数目为3,如图所示,单击“OK”按钮返回。
在“Current Membership Function”区域,选中输入变量相应的曲线, Type设置为trimf,name分别设置为lt,mt,ht,Params将自动生成。按上述方法编辑输入变量m-input和output,结果如图下图所示:



选Edit菜单,选择Rules,弹出一新界面Rule Editor。在底部的选择框内,选择相应的IF…AND…THEN规则,点击Add rule键,上部框内将显示相应的规则,如下图所示:

所有规则填入后,选菜单View,选择Rules,弹出一新界面Rule Viewer,如下图所示:

上图表示当温度为45度、磁能为45瓦时,输出干度为约70个单位。左右拉动界面中的两支红线,拉到欲选的近似值,右边图顶显示相应的干度结果。
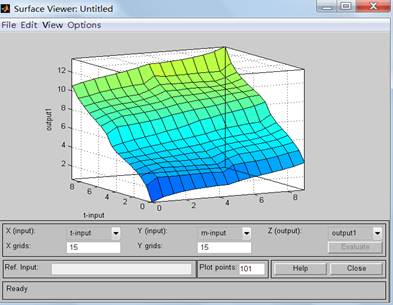
上图中选菜单View, 选择Surface,弹出一新界面Surface Viewer,弹出结果的三维图。如下图所示:
实验感悟:通过本次的实验,了解了模糊控制是一种基于语言的智能控制,学会 了运用MATLAB软件来仿真模糊控制的过程,它提供的建模可视化软件包 Simulink和各种工具箱为仿真研究提供了强有力的手段。利用模糊系统工具箱的图形用户界面工具结合Matlab函数构建模糊控制器,然后利用最优化工具箱函数对模糊控制规则和参数进行优化,最后利用Simulink建立仿真模型并仿真。
- 智能控制实验报告
-
智能控制实验报告
智能控制实验报告数字PID及其算法戴子文20xx30580307房柳煌20xx30580309张荣春20xx30580331指导老…
-
智能控制实验报告
智能控制实验单神经元自适应PID控制一实验目的1熟悉单神经元PID控制器的原理2通过实验进一步掌握有监督的Hebb学习规则及其算法…
-
智能控制实验报告
1掌握MATLAB软件中的模糊工具箱的使用2掌握模糊控制器设计的步骤和要点二实验内容本实验设计一个含有模糊控制器的控制系统并对该系…
-
智能控制技术实验报告
智能控制技术实验报告书学院专业学号姓名实验一模糊控制与传统PID控制的性能比较一实验目的通过本实验的学习使学生了解传统PID控制模…
-
计算机控制实验报告
计算机控制系统实验报告姓名罗才宝学号0953505008指导教师专业年级所在院系完成日期实验一DA数模转换实验一实验目的1掌握数模…
-
人工智能实验报告
人工智能第二次实验报告一实验题目遗传算法的设计与实现二实验目的通过人工智能课程的学习熟悉遗传算法的简单应用三实验内容用遗传算法求解…
-
人工智能实验报告
人工智能实验报告实验名称模糊方法实现电热箱的闭环控制实验模糊逻辑控制FuzzyLogicControl简称模糊控制FuzzyCon…
-
人工智能实验报告
人工智能实验报告ArtificialIntelligence老师刘丽珏班级物联网1201学号0909120xx5姓名钱晓雪日期20…
-
智能控制技术实验报告
智能控制技术实验报告书学院专业学号姓名实验一模糊控制与传统PID控制的性能比较一实验目的通过本实验的学习使学生了解传统PID控制模…