嵌入式课程设计
嵌入式课程设计
基于SDL的数字相框
班 级:
学 院:
指导老师:
姓 名:
一. 嵌入式课程设计概述:
本程序基于SDL开发的一个带有幻灯片功能的数字相框。
二. 课程设计的目的:
本课程设计的目的是通过开发一个消费类电子产品——数字相框,了解嵌入式产品开发的主要步骤,包括需求分析、系统结构设计、图形界面设计、驱动程序、功能优化、系统测试等,从而培养自己独立完成比较复杂的实际系统设计的能力。
三. 课程设计内容:
3.1设计的内容
利用SDL实现图片的调用的功能,利用信号来实现图片的播放功能,利用SDL的可移植性,将该设计方案移植到开发板上,该数字相框的功能包括以下方面:
(1)在LCD屏上全屏循环显示多幅图像文件;
(2)根据设定的时间间隔更新图像;
(4)通过键盘进行操作;
四. 总体设计:
数字相框软件系统功能分为三个模块:
1)图片浏览模块,可以通过按键控制选定某个图像或更新图像页(上一页、下一页)。
2)播放模块,对浏览界面选定的图片进行循环播放。
3)退出模块,退出图片播放和退出程序。
功能模块组织架构图:

五. 详细设计:
该程序分为2个部分:一部分为用户界面层,一部分为功能模块层。
5.1用户界面层代码设计如下:
int Init() //初始化SDL
{
if(( SDL_Init(SDL_INIT_VIDEO) | IMG_Init(IMG_INIT_PNG) ))
{
fprintf(stderr,"SDL init error:%s",SDL_GetError());
return -1;
}
return 0;
}
void creatScreen(int width , int height , Uint8 bpp , Uint32 flags) // 创建屏幕 640*480 0 SDL_SWSURFACE
{
screen = SDL_SetVideoMode(width , height, bpp , flags);
if(screen == NULL)
{
fprintf(stderr,"Could not Creat a Screen!:%s",SDL_GetError());
exit(1);
}
return;
}
void show_Pic(SDL_Surface *bmp ,SDL_Rect *rect) //显示图片
{
SDL_BlitSurface(bmp , NULL , screen , rect);
SDL_UpdateRect(screen , 0 , 0 , 0 , 0 );
SDL_FreeSurface(bmp);
return ;
}
int appMode()
{
int width = WIDTH;
int heigth = HEIGTH;
Uint8 bpp = 0;
Init();
creatScreen(width , heigth, bpp , SDL_SWSURFACE);
backpng = IMG_Load("./image/beijing.jpg");
show_Pic(backpng ,&(screen->clip_rect));
SDL_Delay(3000);
caidan();
SDL_WM_SetCaption(TITLE_NAME, ICON_NAME); //设置窗口标题
return 0;
}
效果如下图:
封面:

菜单:

5.2.功能模块实现代码:
int getRightPic(int a)
{
a++;
if(a > 15 )
{
a = 0;
}
return a;
}
int getLeftPic(int a)
{
a--;
if(a < 0)
{
a = 15;
}
return a;
}
int ShowPic(char *string) //更换显示图片
{
if(strcmp(string , "left") == 0)
{
i = getLeftPic(i);
}
else
i = getRightPic(i);
backpng = IMG_Load(picture[i]);
if(!backpng)
{
fprintf(stderr,"Could not load %s: %s\n",picture[i],SDL_GetError());
exit(1);
}
SDL_Rect rect;
rect.x = (screen->w - backpng->w ) / 2;
rect.y = (screen->h - backpng->h ) / 2;
rect.w = backpng->w;
rect.h = backpng->h;
SDL_UpdateRect(screen , 0 , 0 , 0 , 0 );
show_Pic(backpng , &rect);
return 0;
}
int caidan()
{
png = IMG_Load("./image/caidan.jpg");
show_Pic(png ,&(screen->clip_rect));
}
void timefunc(int sig) /* 定时事件代码 */
{
ShowPic("left");
signal(SIGPROF, timefunc); /* 捕获定时信号 */
}
void xinhao(int signo)
{
if(signo == SIGALRM)
{
//printf("123\n");
}
else
{
signal(SIGALRM, timefunc);
struct itimerval value;
value.it_value.tv_sec=3; /* 定时3秒后启动定时器 */
value.it_value.tv_usec=0;
value.it_interval.tv_sec=3; /* 每隔3秒执行下一个相应的函数 */
value.it_interval.tv_usec=0;
signal(SIGPROF, timefunc); /* 捕获定时信号 */
setitimer(ITIMER_PROF, &value, NULL); /* 定时开始 */
int ret = setitimer(ITIMER_REAL,&value,NULL);
}
}
int main(int argc,char **argv)
{
appMode();
int i=0;
double zoom_x,zoom_y;
SDL_Event event;
while(SDL_WaitEvent(&event))
{
switch(event.type)
{
case SDL_KEYDOWN:
if(event.key.keysym.sym == SDLK_ESCAPE)
{
goto loop;
}
/*if(event.key.keysym.sym == SDLK_SPACE)
{
xinhao(0);
}
if(event.key.keysym.sym == SDLK_END)
{
alarm(1);
SDL_Delay(1000);
caidan();
} */
break;
case SDL_KEYUP:
if(event.key.keysym.sym == 276)
{
ShowPic("left");
}
if(event.key.keysym.sym == 275)
{
ShowPic("right");
}
break;
case SDL_QUIT:
printf("quit\n");
goto loop;
break;
}
}
loop:
raise(SIGKILL);
return 0;
}
效果如下图:

六. 在开发板上移植:
6.1.安装arm-linux交叉编译库.
6.2.对SDL进行交叉编译安装,对程序进行交叉编译。
6.3.挂载6410开发板。
6.4.对程序进行开发板移植。
七. 课程设计总结与体会:
本次课程设计,在linux下的环境下编写程序,然后把程序向开发板上进行移植,比起以往的单一编程,还是有些难度的在课设伊始,单是所熟悉的linux调试环境就用去了我们3天的时间,但事实证明磨刀不误砍柴工,这三天的努力使得我们后面的工作变得容易了许多,主要的困难还是度图形用户界面的控制,但是在老师和同组同学的帮助下,最终我们还是攻克了难题!课设中我们遇到很多的难题,很多东西都是第一次接触,很多用到的技术网上根本没有资料,完全凭借自己去摸索尝试。其中的困难可想而知。然而坚持就是胜利,牙一咬眼一闭坚持做下去,而通过本次课设,我感觉收获还是蛮多的。可能我对于嵌入式的知识学习的还是不太多,但是这之外的东西收获颇丰。它让我学会了如何通过自己的努力去认知一个新事物,更重要的是端正自己的学习态度,只有真正下功夫去学习,才能有收获,正所谓“一份耕耘,一份收获。”没有付出,何谈回报呢?再者,通过本次课设,我也学会了如何去分析问题,如何找出自己设计中的不足,继而去排除解决问题,这就是一个自我学习的过程。当我们通过实验去学习理论知识时,自己动手得出的结论,不仅能加深我们对嵌入式的理解,更能加深我们对此的记忆。
当然,在这其中,我也发现自己的许多不足之处,由于学期伊始我没有好好学习,才落到如此地步,这也可以说是一个教训吧!我相信在以后的学习工作中,我一定会端正自己的学习态度,一丝不苟的去对待每一件事。只有做好足够的准备,才能事半功倍!
第二篇:嵌入式课程设计之触摸屏程序设计
嵌入式课程设计
设计题目:触摸屏驱动程序设计
班级:
学号:
姓名:
指导老师:
设计时间:20##年12月25日--12月28日
目录
第一部分 要求... 0
1.1设计目的... 1
1.2 设计意义... 1
1.3 设计内容... 1
1.4 主要任务... 1
第二部分 正文... 2
2.1触摸屏工作原理(触摸屏接口工作模式)... 2
2.2、设计总体方案... 3
2.3、设计所需工具... 6
2.4、平台构建过程... 6
2.4.1、硬件平台搭建... 6
2.4.2根文件系统的制作... 8
(1)根文件系统... 8
第三章 程序... 13
3.1.程序流程图:... 13
3.2.分析驱动... 13
3.2.1、触摸屏设备驱动中数据结构... 13
3.2.2、触摸屏驱动模块加载和卸载函数... 15
3.2.3、触摸屏设备驱动的读函数... 17
3.2.4、触摸屏设备驱动的轮询与异步通知... 17
3.2.5源程序触摸屏驱动代码:... 18
3.2.6、实验结果显示:... 29
第四部分 心得... 30
4.1 课程设计心得体会:... 30
第五部分 参考文献... 32
5.1【参考文献】... 32
第一部分 要求
1.1 设计目的
1.基于Linux操作系统,以及Emest III实验箱,利用触摸屏返回触点坐标值及动作信息。
2.坐标及动作的具体显示:触摸笔动作,触点X坐标值,触点Y坐标值。
1.2 设计意义
1. 熟悉嵌入式系统开发平台
2. 掌握ARM嵌入式Linux操作系统下的各个指令的使用方法
3. 了解触摸屏的原理
1.3 设计内容
1.Linux系统的正确移植和使用
2.根文件系统的正确移植和使用
3.驱动程序的编译与装载
4.嵌入式系统下应用程序的交叉编译及下载与调试
1.4 主要任务
1.熟悉实验的流程
2.vivi,linux内核的烧写
3.cramfs文件系统(烧写前需编译)的烧写
4.理解驱动程序源代码
5. 调用驱动程序的某些函数,编译与调试应用程序
第二部分 正文
2.1触摸屏工作原理(触摸屏接口工作模式)
(1)普通转换模式
普通转换模式(AUTO_PST = 0,XY_PST = 0)是用作一般目的下的ADC转换。这个模式可以通过设置ADCCON和ADCTSC来进行对AD转换的初始化;而后读取ADCDAT0(ADC数据寄存器0)的XPDATA域(普通ADC转换)的值来完成转换。
(2)分离的X/Y轴坐标转换模式:X轴坐标转换和Y轴坐标转换。
X轴坐标转换(AUTO_PST=0且XY_PST=1)将X轴坐标转换数值写入到ADCDAT0寄存器的XPDATA域。转换后,触摸屏接口将产生中断源(INT_ADC)到中断控制器。
Y轴坐标转换(AUTO_PST=0且XY_PST=2)将X轴坐标转换数值写入到ADCDAT1寄存器的YPDATA域。转换后,触摸屏接口将产生中断源(INT_ADC)到中断控制器。
(3)自动(连续)X/Y轴坐标转换模式。
自动(连续)X/Y轴坐标转换模式(AUTO_PST=1且XY_PST= 0)以下面的步骤工作:
触摸屏控制器将自动地切换X轴坐标和Y轴坐标并读取两个坐标轴方向上的坐标。触摸屏控制器自动将测量得到的X轴数据写入到ADCDAT0寄存器的XPDATA域,然后将测量到的Y轴数据到ADCDAT1的YPDATA域。自动(连续)转换之后,触摸屏控制器产生中断源(INT_ADC)到中断控制器。
(4)等待中断模式
当触摸屏控制器处于等待中断模式下时,它实际上是在等待触摸笔的点击。在触摸笔点击到触摸屏上时,控制器产生中断信号(INC_TC)。中断产生后,就可以通过设置适当的转换模式(分离的X/Y轴坐标转换模式或自动X/Y轴坐标转换模式)来读取X和Y的位置。
(5)静态(Standby)模式
当ADCCON寄存器的STDBM位被设为1时,Standby模式被激活。在该模式下,A/D转换操作停止,ADCDAT0寄存器的XPDATA域和ADCDAT1寄存器的YPDATA(正常ADC)域保持着先前转换所得的值。
2.2、设计总体方案
1、软件
(1)Embest Online Flash Programmer For ARM: Embest Flash在线编程器
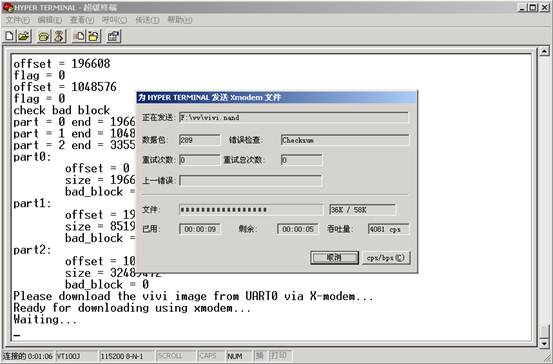
(2)HYPER TERMINAL(超级终端):传送vivi.nand; 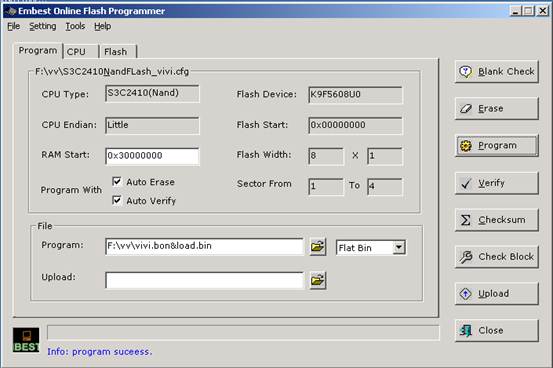
传送vivi.nand
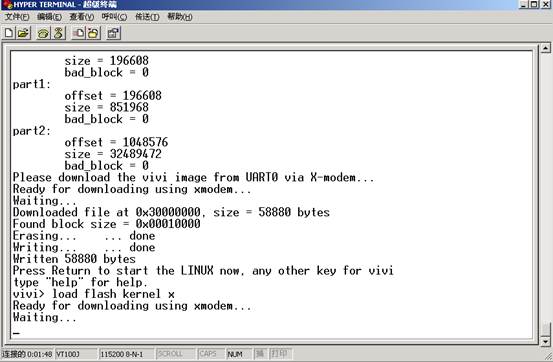
vivi> load flash kernel x <回车> 烧写更新内核,传送zImage文件;
等待传送内核文件
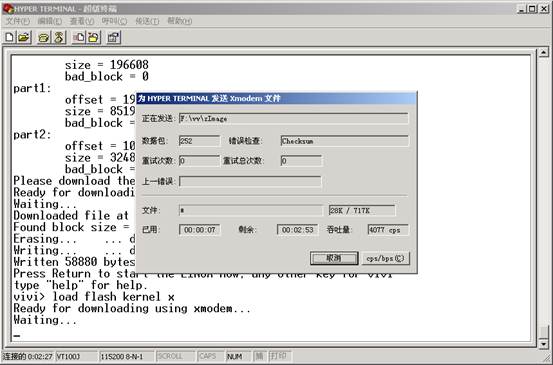
传送内核:
vivi>load flash root j <回车> 烧写更新文件系统;
烧写新的文件系统 load flash root j

(3) EmbestIDE Pro for ARM:
应用于嵌入式软件开发的新一代集成开发环境,是一个高度集成的图形界面操作环境,包含编辑器、编译汇编链接器、调试器、工程管理、Flash 编程等工具;支持的开发语言包括标准C和汇编语言。
(4)cygwin:
一个在windows平台上运行的unix模拟环境,它对于学习unix/linux操作环境,或者从unix到windows的应用程序移植,或者进行某些特殊的开发工作,尤其是使用gnu工具集在windows上进行嵌入式系统开发,把gcc,gdb,gas等开发工具进行了改进,能够生成并解释win32的目标文件。
2、硬件
S3C2410处理器是Samsung公司基于ARM公司的ARM920T处理器核,32位微控制器。该处理器拥有:独立的16KB指令Cache和16KB数据Cache,MMU,支持TFT的LCD控制器,NAND闪存控制器,3路UART,4路DMA,4路带PWM的Timer ,I/O口,RTC,8路10位ADC,Touch Screen接口,IIC-BUS 接口,IIS-BUS 接口,2个USB主机,1个USB设备,SD主机和MMC接口,2路SPI。S3C2410处理器最高可运行在203MHz。
2.3、设计所需工具
1.软件: Embest Online Flash Programmer For ARM,HYPER TERMINAL(超级终端),EmbestIDE Pro for ARM,cygwin
1. 硬件:s3c2410开发板,Embest实验箱
2.4、平台构建过程
2.4.1、硬件平台搭建
 硬件流程图:
硬件流程图:
(1) Vivi烧写过程
1)首先把SW104断开,Flash Programmer的Program,在File选择Open打开要烧写的配置文件S3C2410&NandFLash_vivi.cfg,在Flash Programmer的Program页中选择要烧写的文件vivi.bon&load.bin。点击按钮 Progarm 开始烧写,直到烧写成功
2) 连接串口线到 PC 机 COM1,运行光盘中提供的 Windows 超级终端Hyper Terminal.ht 把开发板重新加电,程序运行后,在超级终端上可以看到串口输出Wating,表示正在等待用户从超级终端下载文件。这时,请点击超级终端菜单"传送"选择 Xmodem 方式下载 vivi.nand 文件,点击 OK 后等待下载烧写结束即可。
(2) 内核zImage烧写
1) 首先SW104设为短接(从Nand Flash启动),并确定已经烧写vivi.nand,加电。
2 ) 在vivi启动等待中,敲入空格键进入vivi界面环境,并输入以下命令:vivi> load flash kernel x <回车> 烧写更新内核约1分钟即可烧写完毕
3 ) 点击超级终端菜单中的“传送”,选“发送文件”zImage” 并选择xModem方式传送)烧写结束,重起实验板,观测超级终端窗口提示信息就可以启动linux内核,
(3) 新文件系统的烧写
1)首先SW104设为短接(从Nand Flash启动),确定已经成功烧写vivi.nand,加电运行可以看到vivi启动信息,输入空格进入命令状态;
2)双击运行Download.pjf(该文件在/tmp/edukit-2410/image/中)工程(将启动Embest IDE环境),点击连接Remote connect,程序应该正在运行(命令按钮STOP为红色);在串口输入help,看看有没有反应,如果没反应,点击IDE 按钮:Reset ->Start(F5);再输入help测试,直到有反应为止;
3)如果可以输出一些信息,再点击IDE中的Stop,配置Debug的Download地址为0x30000000,并点击IDE菜单Project选择Settings项,在Download页下拉Category到Download项,在Download File选择root.cramfs文件,点击确定后:
点击IDE菜单DEBUG选择Download下载文件系统映象?约1分钟
下载完毕后,点击Start(F5)
然后在超级终端里输入: load flash root j (烧写更新文件系统)?约1分钟即可烧写完毕
注意:只能在“vivi的烧写”操作完成后,才可以按以上方法正确烧写root映象到Nand Flash。
重起实验板,观测超级终端窗口提示信息,引导整个系统启动到linux行命令输入状态。
2.4.2根文件系统的制作
(1)根文件系统
根文件系统是Linux系统的核心部分,包含系统使用的软件和库,以及所有用来为用户提供支持架构和用户使用的应用软件,并作为储存数据读写结果的区域。在Linux系统启动时,首先完成内核安装及环境初始化,最后会寻找一个文件系统作为根文件系统被加载。Linux系统中使用“/”来唯一表示根文件系统的安装路径。嵌入式系统中通常可以悬着的根文件系统有:Romfs、CRAMFS、RAMFS、JFFS2、EXT2等,甚至还可以使用NFS作为根文件系统。
(2)cramfs文件系统
Cramfs是Linux创始人Linux torvalds开发的一个适用于嵌入式系统的小文件系统。Cramfs是一个只读文件系统,采用zlib压缩,压缩比一般可以达到1:2,但仍可以做到高效的随机读取。Linux系统中,通常把需要修改的目录压缩存放,并在系统引导的时候再将压缩文件解开。因为cramfs不会影响系统读取文件的速度,而且是一个高度压缩的文件系统,因此非常广泛应用于嵌入式系统中。
(3)cygwin简介
Cygwin是一个在windows平台上运行的unix/Linux模拟环境,是cygnus solutions公司开发的自由软件。Cygwin中,“/”表示根目录,即cygwin的安装目录。我们常用的set_env_linux.sh中定义的目录有:
SOURCEDIR:/tmp/edukit-2410存储了vivi、linux、fs等源代码和例程
WORKDIR:/usr/local/src/edukit-2410工作区。
一般情况下都要把已经规划好的目录结构转换成一个映象文件,即使用命令工具 mkcramfs(cygwin下为 mkcramfs.exe),把相应的 cramfs 目录树压缩为单一的映象文件。其命令格式为:
mkcramfs [-h] [-e edition] [-i file] [-n name] dirname outfile
可以使用我们提供的 mkcramfs.exe 在 cygwin 下编译生成文件系统映象文件 root.cramfs,再固化到开发系统 FLASH 上运行。
(4)常用的Linux行命令
1)、cd 改变当前目录(文件夹)。例如下,
cd/ 返回到根目录
cd.. 退回到上级目录
cd/tmp/edukit-2410/进入/tmp/edukit-2410/文件夹
2)、ls 列出当前目录中的内容。
Ls 简单格式列表
ls–l 使用详细格式列表。
3)、pwd 显示当前所在的目录。
(5)tar工具命令
tar 程序用于储存或展开 tar 存档文件。
命令格式:
tar [-参数] [文件名][路径]
-x :extract | --get 从存档展开文件
-v :--verbose 详细显示处理的文件
-j :--有 bz2 属性的必须包含
-f :--file [HOSTNAME:]F 指定存档或设备(缺省为 /dev/rmt0)
(6)解压原文件系统(命令+解压目录的存放)
1)先将 root.cramfs.tar.bz2文件放在C:\cygwin目录中
2)解压文件系统
运行cygwin,执行以下命令解压安装:
$> source /tmp/edukit-2410/set_env_linux.sh?Linux编译环境变量设置
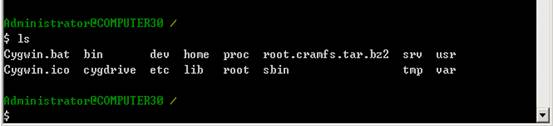
$> cd /
$> tar -xvjf root.cramfs.tar.bz2
$> ls
… root …
root文件夹中就是我们想要的cramfs文件系统
3) 如果在根目录中产生root文件夹,解压成功
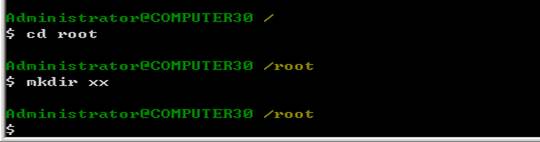
4)在root目录中新建xx文件夹,用于存放应用程序
进入该目录后执行以下命令编译链接测试程序:
$> cd root
$>mkdir xx
(7)编译应用程序 ts.c (命令+生成文件格式+存放位置):
将编写好的ts.c程序放在C:\cygwin目录中
进入该目录后执行以下命令编译链接测试程序:
$> cd /
$> arm-linux-gcc -o ts ts.c (也可以编写Makefile来编译)
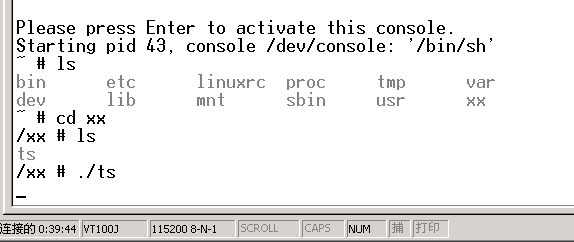
生成文件: ts 如下图所示
将ts文件放入root 下的xx文件夹中
(8) 新文件系统的制作:
把刚才编译输出的ts文件拷贝到文件系统所在的工作目录root目录下,执行以下命令生成新的文件系统映象:
$> cd /
$> mkcramfs root root.new
刚刚编译生成的文件系统映象 root.new 中已经包含测试程序即生成文件。
解压文件系统

解压成功如下
在root目录中新建xx文件夹,用于存放应用程序
将编写好的ts.c程序放在C:\cygwin目录中
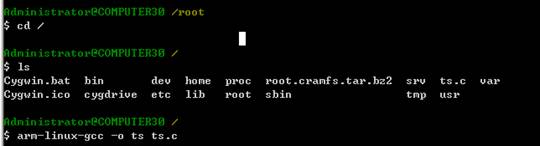
生成文件: ts 如下图所示
新文件系统的制作
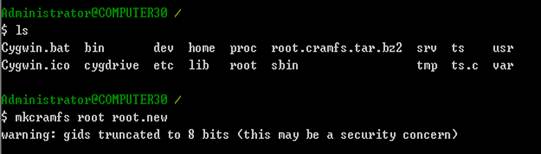
生成文件:
第三章 程序
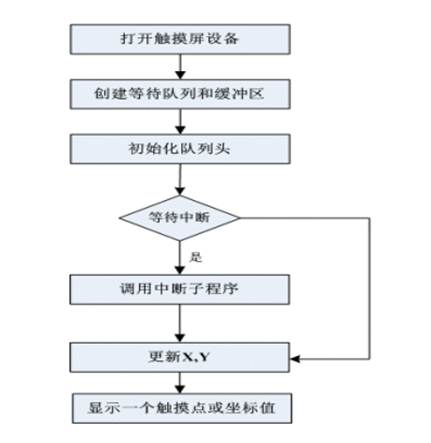
3.1.程序流程图:
3.2.分析驱动
触摸屏驱动在/kernel/drivers/char/s3c2410-ts.c 文件中。
3.2.1、触摸屏设备驱动中数据结构
(1)触摸屏的file_operations
static struct file_operations s3c2410_fops={
owner: THIS_MODULE,
open: s3c2410_ts_open,
read: s3c2410_ts_read,
release: s3c2410_ts_release,
#ifdef USE_ASYNC
fasync: s3c2410_ts_fasync,//异步通知
#endif
poll: s3c2410_ts_poll,//轮询
};
(2)触摸屏设备结构体的成员与按键设备结构体的成员类似,也包含一个缓冲区,同时包括自旋锁、等待队列和fasync_struct指针
typedef struct {
unsigned int penStatus; /* PEN_UP, PEN_DOWN, PEN_SAMPLE */
TS_RET buf[MAX_TS_BUF]; /* protect against overrun(环形缓冲区) */
unsigned int head, tail;/* head and tail for queued events (环形缓冲区的头尾)*/
wait_queue_head_t wq; //* 等待队列数据结构
spinlock_t lock; //* 自旋锁
#ifdef USE_ASYNC
struct fasync_struct *aq;
#endif
#ifdef CONFIG_PM
struct pm_dev *pm_dev; //友善之臂专有的,我后面的代码删除了这段
#endif
} TS_DEV;
(3)触摸屏结构体中包含的TS_RET值的类型定义,包含X、Y坐标和状态(PEN_DOWN、PEN_UP)等信息,这个信息会在用户读取触摸信息时复制到用户空 间
typedef struct {
unsigned short pressure; //* 压力,这里可定义为笔按下,笔抬起,笔拖曳
unsigned short x; //* 横坐标的采样值
unsigned short y; //* 纵坐标的采样值
unsigned short pad; //* 填充位
} TS_RET;
(4)在触摸屏设备驱动中,将实现open()、release()、read()、fasync()和poll()函数,因此,其文件操作结构体定义
触摸屏驱动文件操作结构体:static struct file_operations s3c2410_fops={}
3.2.2、触摸屏驱动模块加载和卸载函数
(1)在触摸屏设备驱动的模块加载函数中,要完成申请设备号、添加cdev、申请中断、设置触摸屏控制引脚(YPON、YMON、XPON、XMON)等多项工作
触摸屏设备驱动的模块加载函数
static int __init s3c2410_ts_init(void)
触摸屏设备驱动模块卸载函数
static void __exit s3c2410_ts_exit(void)
(2)可知触摸屏驱动中会产生两类中断,一类是触点中断(INT-TC),一类是X/Y位置转换中断(INT-ADC)。在前一类中断发生后,若之前处于PEN_UP状态,则应该启动X/Y位置转换。另外,将抬起中断也放在INT-TC处理程序中,它会调用tsEvent()完成等待队列和信号的释放
触摸屏设备驱动的触点/抬起中断处理程序
static void s3c2410_isr_tc(int irq, void *dev_id, struct pt_regs *reg)
当X/Y位置转换中断发生后,应读取X、Y的坐标值,填入缓冲区
触摸屏设备驱动X/Y位置转换中断处理程序
static void s3c2410_isr_adc(int irq, void *dev_id, struct pt_regs *reg)
触摸屏设备驱动中获得X、Y坐标
static inline void s3c2410_get_XY(void)
(3)tsEvent最终为tsEvent_raw(),这个函数很关键,当处于PEN_DOWN状态时调用该函数,它会完成缓冲区的填充、等待队列的唤醒以及异步通知信号的释放;否则(处于PEN_UP状态),将缓冲区头清0,也唤醒等待队列并释放信号
触摸屏设备驱动的tsEvent_raw()函数
static void tsEvent_raw(void)
(4)在包含了对拖动轨迹支持的情况下,定时器会被启用,周期为10ms,在每次定时器处理函数被引发时,调用start_ts_adc()开始X/Y位置转换过程
触摸屏设备驱动的定时器处理函数
static void ts_timer_handler(unsigned long data)
(5)在触摸屏设备驱动的打开函数中,应初始化缓冲区、penStatus和定期器、等待队列及tsEvent时间处理函数指针
触摸屏设备驱动的打开函数
static int s3c2410_ts_open(struct inode *inode, struct file *filp)
(6)触摸屏设备驱动的释放函数非常简单,删除为用于拖动轨迹所使用的定时器即可
触摸屏设备驱动的释放函数
static int s3c2410_ts_release(struct inode *inode, struct file *filp)
3.2.3、触摸屏设备驱动的读函数
触摸屏设备驱动的读函数实现缓冲区中信息向用户空间的复制,当缓冲区有内容时,直接复制;否则,如果用户阻塞访问触摸屏,则进程在等待队列上睡眠,否则,立即返回-EAGAIN
触摸屏设备驱动的读函数
static ssize_t s3c2410_ts_read(struct file *filp, char *buffer, size_t count, loff_t *ppos)
3.2.4、触摸屏设备驱动的轮询与异步通知
在触摸屏设备驱动中,通过s3c2410_ts_poll()函数实现了轮询接口,这个函数的实现非常简单。它将等待队列添加到poll_table,当缓冲区有数据时,返回资源可读取标志,否则返回0
触摸屏设备驱动的poll()函数
static unsigned int s3c2410_ts_poll(struct file *filp, struct poll_table_struct *wait)
而为了实现触摸屏设备驱动对应用程序的异步通知,设备驱动中要实现s3c2410_ts_fasync()函数
触摸屏设备驱动的fasync()函数
static int s3c2410_ts_fasync(int fd, struct file *filp, int mode)
3.2.5源程序触摸屏驱动代码:
/*
* s3c2410-ts.c
*
* touchScreen driver for SAMSUNG S3C2410
*
* Author: Janghoon Lyu <nandy@mizi.com>
* Date : $Date: 2002/06/04 07:11:00 $
*
* $Revision: 1.1.2.6 $
*
* Based on pt036001b-ts.c
*
* This file is subject to the terms and conditions of the GNU General Public
* License. See the file COPYING in the main directory of this archive
* for more details.
*
* History:
*
* 20##-05-27: Janghoon Lyu <nandy@mizi.com>
* - Add HOOK_FOR_DRAG
* - PM 内靛啊 甸绢啊 乐变 窍瘤父 抛胶飘 登瘤 臼疽澜.
*
*/
#include <linux/config.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/miscdevice.h>
#include <linux/sched.h>
#include <linux/delay.h>
#include <linux/poll.h>
#include <linux/spinlock.h>
#include <linux/irq.h>
#include <linux/delay.h>
#include <asm/hardware.h>
#ifdef CONFIG_PM
#include <linux/pm.h>
#endif
/* debug macros */
#undef DEBUG
#ifdef DEBUG
#define DPRINTK( x... ) printk("s3c2410-ts: " ##x)
#else
#define DPRINTK( x... )
#endif
#define PEN_UP 0
#define PEN_DOWN 1
#define PEN_FLEETING 2
#define MAX_TS_BUF 16 /* how many do we want to buffer */
#undef USE_ASYNC 1
#define DEVICE_NAME "s3c2410-ts"
#define TSRAW_MINOR 1
typedef struct {
unsigned int penStatus; /* PEN_UP, PEN_DOWN, PEN_SAMPLE */
TS_RET buf[MAX_TS_BUF]; /* protect against overrun */
unsigned int head, tail; /* head and tail for queued events */
wait_queue_head_t wq;
spinlock_t lock;
#ifdef USE_ASYNC
struct fasync_struct *aq;
#endif
#ifdef CONFIG_PM
struct pm_dev *pm_dev;
#endif
} TS_DEV;
static TS_DEV tsdev;
#define BUF_HEAD (tsdev.buf[tsdev.head])
#define BUF_TAIL (tsdev.buf[tsdev.tail])
#define INCBUF(x,mod) ((++(x)) & ((mod) - 1))
static int tsMajor = 0;
static void (*tsEvent)(void);
#define HOOK_FOR_DRAG
#ifdef HOOK_FOR_DRAG
#define TS_TIMER_DELAY (HZ/100) /* 10 ms */
static struct timer_list ts_timer;
#endif
#define wait_down_int() { ADCTSC = DOWN_INT | XP_PULL_UP_EN | \
XP_AIN | XM_HIZ | YP_AIN | YM_GND | \
XP_PST(WAIT_INT_MODE); }
#define wait_up_int() { ADCTSC = UP_INT | XP_PULL_UP_EN | XP_AIN | XM_HIZ | \
YP_AIN | YM_GND | XP_PST(WAIT_INT_MODE); }
#define mode_x_axis() { ADCTSC = XP_EXTVLT | XM_GND | YP_AIN | YM_HIZ | \
XP_PULL_UP_DIS | XP_PST(X_AXIS_MODE); }
#define mode_x_axis_n() { ADCTSC = XP_EXTVLT | XM_GND | YP_AIN | YM_HIZ | \
XP_PULL_UP_DIS | XP_PST(NOP_MODE); }
#define mode_y_axis() { ADCTSC = XP_AIN | XM_HIZ | YP_EXTVLT | YM_GND | \
XP_PULL_UP_DIS | XP_PST(Y_AXIS_MODE); }
#define start_adc_x() { ADCCON = PRESCALE_EN | PRSCVL(49) | \
ADC_INPUT(ADC_IN5) | ADC_START_BY_RD_EN | \
ADC_NORMAL_MODE; \
ADCDAT0; }
#define start_adc_y() { ADCCON = PRESCALE_EN | PRSCVL(49) | \
ADC_INPUT(ADC_IN7) | ADC_START_BY_RD_EN | \
ADC_NORMAL_MODE; \
ADCDAT1; }
#define disable_ts_adc() { ADCCON &= ~(ADCCON_READ_START); }
static int adc_state = 0;
static int x, y; /* touch screen coorinates */
static void tsEvent_raw(void)
{
if (tsdev.penStatus == PEN_DOWN) {
BUF_HEAD.x = x;
BUF_HEAD.y = y;
BUF_HEAD.pressure = PEN_DOWN;
#ifdef HOOK_FOR_DRAG
ts_timer.expires = jiffies + TS_TIMER_DELAY;
add_timer(&ts_timer);
#endif
} else {
#ifdef HOOK_FOR_DRAG
del_timer(&ts_timer);
#endif
BUF_HEAD.x = 0;
BUF_HEAD.y = 0;
BUF_HEAD.pressure = PEN_UP;
}
tsdev.head = INCBUF(tsdev.head, MAX_TS_BUF);
wake_up_interruptible(&(tsdev.wq));
#ifdef USE_ASYNC
if (tsdev.aq)
kill_fasync(&(tsdev.aq), SIGIO, POLL_IN);
#endif
#ifdef CONFIG_PM
pm_access(tsdev.pm_dev);
#endif
}
static int tsRead(TS_RET * ts_ret)
{
spin_lock_irq(&(tsdev.lock));
ts_ret->x = BUF_TAIL.x;
ts_ret->y = BUF_TAIL.y;
ts_ret->pressure = BUF_TAIL.pressure;
tsdev.tail = INCBUF(tsdev.tail, MAX_TS_BUF);
spin_unlock_irq(&(tsdev.lock));
return sizeof(TS_RET);
}
static ssize_t s3c2410_ts_read(struct file *filp, char *buffer, size_t count, loff_t *ppos)
{
TS_RET ts_ret;
retry:
if (tsdev.head != tsdev.tail) {
int count;
count = tsRead(&ts_ret);
if (count) copy_to_user(buffer, (char *)&ts_ret, count);
return count;
} else {
if (filp->f_flags & O_NONBLOCK)
return -EAGAIN;
interruptible_sleep_on(&(tsdev.wq));
if (signal_pending(current))
return -ERESTARTSYS;
goto retry;
}
return sizeof(TS_RET);
}
#ifdef USE_ASYNC
static int s3c2410_ts_fasync(int fd, struct file *filp, int mode)
{
return fasync_helper(fd, filp, mode, &(tsdev.aq));
}
#endif
static unsigned int s3c2410_ts_poll(struct file *filp, struct poll_table_struct *wait)
{
poll_wait(filp, &(tsdev.wq), wait);
return (tsdev.head == tsdev.tail) ? 0 : (POLLIN | POLLRDNORM);
}
static inline void start_ts_adc(void)
{
adc_state = 0;
mode_x_axis();
start_adc_x();
}
static inline void s3c2410_get_XY(void)
{
if (adc_state == 0) {
adc_state = 1;
disable_ts_adc();
y = (ADCDAT0 & 0x3ff);
mode_y_axis();
start_adc_y();
} else if (adc_state == 1) {
adc_state = 0;
disable_ts_adc();
x = (ADCDAT1 & 0x3ff);
tsdev.penStatus = PEN_DOWN;
DPRINTK("PEN DOWN: x: %08d, y: %08d\n", x, y);
wait_up_int();
tsEvent();
}
}
static void s3c2410_isr_adc(int irq, void *dev_id, struct pt_regs *reg)
{
#if 0
DPRINTK("Occured Touch Screen Interrupt\n");
DPRINTK("SUBSRCPND = 0x%08lx\n", SUBSRCPND);
#endif
spin_lock_irq(&(tsdev.lock));
if (tsdev.penStatus == PEN_UP)
s3c2410_get_XY();
#ifdef HOOK_FOR_DRAG
else
s3c2410_get_XY();
#endif
spin_unlock_irq(&(tsdev.lock));
}
static void s3c2410_isr_tc(int irq, void *dev_id, struct pt_regs *reg)
{
#if 0
DPRINTK("Occured Touch Screen Interrupt\n");
DPRINTK("SUBSRCPND = 0x%08lx\n", SUBSRCPND);
#endif
spin_lock_irq(&(tsdev.lock));
if (tsdev.penStatus == PEN_UP) {
start_ts_adc();
} else {
tsdev.penStatus = PEN_UP;
DPRINTK("PEN UP: x: %08d, y: %08d\n", x, y);
wait_down_int();
tsEvent();
}
spin_unlock_irq(&(tsdev.lock));
}
#ifdef HOOK_FOR_DRAG
static void ts_timer_handler(unsigned long data)
{
spin_lock_irq(&(tsdev.lock));
if (tsdev.penStatus == PEN_DOWN) {
start_ts_adc();
}
spin_unlock_irq(&(tsdev.lock));
}
#endif
static int s3c2410_ts_open(struct inode *inode, struct file *filp)
{
tsdev.head = tsdev.tail = 0;
tsdev.penStatus = PEN_UP;
#ifdef HOOK_FOR_DRAG
init_timer(&ts_timer);
ts_timer.function = ts_timer_handler;
#endif
tsEvent = tsEvent_raw;
init_waitqueue_head(&(tsdev.wq));
MOD_INC_USE_COUNT;
return 0;
}
static int s3c2410_ts_release(struct inode *inode, struct file *filp)
{
#ifdef HOOK_FOR_DRAG
del_timer(&ts_timer);
#endif
MOD_DEC_USE_COUNT;
return 0;
}
static struct file_operations s3c2410_fops = {
owner: THIS_MODULE,
open: s3c2410_ts_open,
read: s3c2410_ts_read,
release: s3c2410_ts_release,
#ifdef USE_ASYNC
fasync: s3c2410_ts_fasync,
#endif
poll: s3c2410_ts_poll,
};
void tsEvent_dummy(void) {}
#ifdef CONFIG_PM
static int s3c2410_ts_pm_callback(struct pm_dev *pm_dev, pm_request_t req,
void *data)
{
switch (req) {
case PM_SUSPEND:
tsEvent = tsEvent_dummy;
break;
case PM_RESUME:
tsEvent = tsEvent_raw;
wait_down_int();
break;
}
return 0;
}
#endif
#ifdef CONFIG_DEVFS_FS
static devfs_handle_t devfs_ts_dir, devfs_tsraw;
#endif
static int __init s3c2410_ts_init(void)
{
int ret;
tsEvent = tsEvent_dummy;
ret = register_chrdev(0, DEVICE_NAME, &s3c2410_fops);
if (ret < 0) {
printk(DEVICE_NAME " can't get major number\n");
return ret;
}
tsMajor = ret;
/* set gpio to XP, YM, YP and YM */
#if 0
set_GPIO_mode(GPIO106_nYPON_MD);
set_GPIO_mode(GPIO105_YMON_MD);
set_GPIO_mode(GPIO104_nXPON_MD);
set_GPIO_mode(GPIO103_XMON_MD);
GPUP(GPIO106_nYPON) |= GPIO_bit(GPIO106_nYPON);
GPUP(GPIO105_YMON) &= GPIO_bit(GPIO105_YMON);
GPUP(GPIO104_nXPON) |= GPIO_bit(GPIO104_nXPON);
GPUP(GPIO103_XMON) &= GPIO_bit(GPIO103_XMON);
#else
set_gpio_ctrl(GPIO_YPON);
set_gpio_ctrl(GPIO_YMON);
set_gpio_ctrl(GPIO_XPON);
set_gpio_ctrl(GPIO_XMON);
#endif
/* Enable touch interrupt */
ret = request_irq(IRQ_ADC_DONE, s3c2410_isr_adc, SA_INTERRUPT,
DEVICE_NAME, s3c2410_isr_adc);
if (ret) goto adc_failed;
ret = request_irq(IRQ_TC, s3c2410_isr_tc, SA_INTERRUPT,
DEVICE_NAME, s3c2410_isr_tc);
if (ret) goto tc_failed;
/* Wait for touch screen interrupts */
wait_down_int();
#ifdef CONFIG_DEVFS_FS
devfs_ts_dir = devfs_mk_dir(NULL, "touchscreen", NULL);
devfs_tsraw = devfs_register(devfs_ts_dir, "0raw", DEVFS_FL_DEFAULT,
tsMajor, TSRAW_MINOR, S_IFCHR | S_IRUSR | S_IWUSR,
&s3c2410_fops, NULL);
#endif
#ifdef CONFIG_PM
#if 0
tsdev.pm_dev = pm_register(PM_GP_DEV, PM_USER_INPUT,
s3c2410_ts_pm_callback);
#endif
tsdev.pm_dev = pm_register(PM_DEBUG_DEV, PM_USER_INPUT,
s3c2410_ts_pm_callback);
#endif
printk(DEVICE_NAME " initialized\n");
return 0;
tc_failed:
free_irq(IRQ_ADC_DONE, s3c2410_isr_adc);
adc_failed:
return ret;
}
static void __exit s3c2410_ts_exit(void)
{
#ifdef CONFIG_DEVFS_FS
devfs_unregister(devfs_tsraw);
devfs_unregister(devfs_ts_dir);
#endif
unregister_chrdev(tsMajor, DEVICE_NAME);
#ifdef CONFIG_PM
pm_unregister(tsdev.pm_dev);
#endif
free_irq(IRQ_ADC_DONE, s3c2410_isr_adc);
free_irq(IRQ_TC, s3c2410_isr_tc);
}
module_init(s3c2410_ts_init);
module_exit(s3c2410_ts_exit);
触摸屏应用程序
#include <stdio.h>
#include <unistd.h>
#include <fcntl.h> /* 文件操作 */
#define PEN_UP 0 /* 触摸笔抬笔,即触摸屏不被压下 */
#define PEN_DOWN 1 /* 触摸笔下笔,即触摸屏被压下 */
#define PEN_FLEETING 2 /* 触摸笔拖动 */
typedef struct {
unsigned short pressure; /* 触摸笔动作 */
unsigned short x; /* 触点x座标值 */
unsigned short y; /* 触点y座标值 */
unsigned short pad;
}TS_RET;
int main()
{
int fd,ret,i;
unsigned char suba;
TS_RET tsret;
fd = open("/dev/touchscreen/0raw", O_RDWR); /* 打开设备 */
if(fd == -1)
{
printf("\nCan't open I2C device!\n");
exit(-1);
}
while(1)
{
ret = read(fd, (char *)&tsret, sizeof(TS_RET));
if (ret != sizeof(TS_RET))
{
printf("read touch screen error!");
close(fd);
exit(-1);
}
else
{
printf("pressure is: %d\n", tsret.pressure);
printf("x is: %d\n", tsret.x);
printf("y is: %d\n", tsret.y);
}
}
close(fd);
return 0;
}
3.3.应用程序的调试
使用s3c2410_ts.c触摸屏驱动编写应用程序,读取触摸屏的触点坐标值及动作信息(触点x坐标值,y坐标及是否有压力值press),并在串口中断打印出来
对触摸屏设别的操作有打开设备,关闭设备,读操作等。编写应用程序读取触摸屏的触点坐标值及动作信息时,只需利用触摸屏驱动程序便可实现,先打开触摸屏设备,然后调用读函数即可。
其中,触摸笔动作取值如下:
#define PEN_UP 0 /* 触摸笔抬笔,即触摸屏不被压下 */
#define PEN_DOWN 1 /* 触摸笔下笔,即触摸屏被压下 */
#define PEN_FLEETING 2 /* 触摸笔拖动 */
结构体定义如下:
typedef struct {
unsigned short pressure; /* 触摸笔动作 */
unsigned short x; /* 触点x座标值 */
unsigned short y; /* 触点y座标值 */
unsigned short pad;
}TS_RET
打开应用程序:
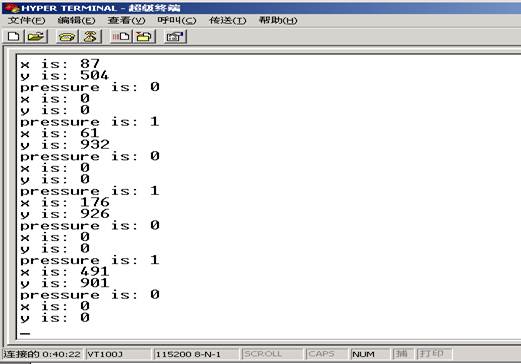 3.2.6、实验结果显示:
3.2.6、实验结果显示:
第四部分感想
第四部分 心得
4.1 课程设计心得体会:
为期几天的课程设计结束了,再次期间我积极亲自实验,用的目标板是s3c2410核心子板,用JTAG仿真器,用Cygwin模拟软件来学习触摸板的设计。我学会了很多,学会了很多。
首先我扪主要了解整个设计过程,以及实验环境的建立,这次用的是交叉编译环境,通过这次课设我更清楚搭建嵌入式系统的开发平台,我们用的目标板是s3c2410核心子板,用JTAG仿真器,用Cygwin模拟软件,课设的这几天我学会了熟练的使用Cygwin软件,掌握了一些常用的命令,加上研究生学长给我们的指导,知道了如何学习,如何思考,知道了运linux操作系统开发嵌入式与wince操作系统开发嵌入式的区别。
其次是学会vivi,内核,根文件系统的编译与移植(烧写),通过这个过程我熟悉了怎么把软件固化到硬件上,知道了软件怎么控制硬件,这个步骤很重要,要烧写不成功,目标板系统就运行不起来,实验就失败了,这个过程我们练习了好多变呢,大家都很累哦!
再次我们就开始写我们的应用程序,通过以上步骤实验系统搭建好了,只要调试好应用程序,然后再运行成功就行了,为此我又把课本上讲得触摸屏原理那章认真看了,又看了实验指导书,查资料,上网搜索,终于编出应用程序,经过不断的调试才编译成功,这个过程太辛苦了,加上实验板不太好,真是对我们的挑战,不过看到运行的结果,大家都很高兴,也很有成就感啊!还看懂了一些s3c2410的驱动程序的源代码,了解了s3c2410一些控制器的使用,以及s3c2410A的一些接口原理与应用。
我明白了只有不断的努力,不断的学习,才能在将来遇到的问题中能够游刃有余,才能够不会捉襟见肘。
第五部分 参考文献
5.1【参考文献】
1 程昌南,方强等.《ARM Linux入门与实践 》【M】.北京:北京航空航天大学出版社,2008.10
2 张晓林等.《嵌入式系统设计与实践》【M】.北京:北京航空航天大学出版社,2006.1
3 李俊等.《嵌入式Linux设备驱动开发详解》【M】.北京:北京人民邮电出版社,2008.3
4 黄智伟,邓月明,王彦.《ARM9嵌入式系统设计基础教程》.北京:北京航空航天大学出版社,2008.8
5 [美]Wayne Wolf. 嵌入式计算系统设计原理. 孙玉芳, 梁彬 罗保国 等译. 北京: 机械工业出版社, 20##
6 李剑, 赵鹏程, 汤建彬. 32位ARM嵌入式处理器的调试技术. 电子技术应用, 2003, (3)
7 钟汉如, 王创生. 嵌入式Linux的中断处理与实时调度的实现机制. 计算机工程, 2002, 28(10)
8 Arnold Berger. 嵌入式系统设计. 吕骏 译. 北京: 电子工业出版社, 20##
软件流程图:
-
嵌入式课程设计心得体会
本学期为期一周的嵌入式课程设计在不知不觉中结束了,虽说这次课程设计时间不是很长,但是感觉自己收获颇丰,不仅学习到了一些新知识,回顾…
-
嵌入式课程设计报告
福建工程学院嵌入式系统课程设计报告书题目基于S3C2440设备驱动及其界面设计班级姓名学号指导老师陈靖张平均李光炀2目录一设计课题…
-
嵌入式课程设计报告
信息技术学院嵌入式操作系统课程综合设计报告书姓名班级B0905学号XXXX题目嵌入式文件锁应用时间20xx年6月指导教师摘要随着P…
-
嵌入式课程设计报告
中南大学嵌入式课程设计基于ARM平台的打地鼠游戏姓名董嘉伟学号0909103303班级物联网1002时间20xx913目录课程设计…
-
嵌入式系统课程设计报告
嵌入式系统课程设计报告基于ARM的楼宇对讲系统设计摘要采用模块化设计方法设计出一款基于ARM微控制芯片和Linux操作系统的楼宇对…
-
嵌入式课程设计心得体会
本学期为期一周的嵌入式课程设计在不知不觉中结束了,虽说这次课程设计时间不是很长,但是感觉自己收获颇丰,不仅学习到了一些新知识,回顾…
-
课程设计心得体会大全
DSP作为嵌入式处理器家族的一大类其结构特点决定了它尤其适合做数字信号处理的应用而学好数字信号处理对日后的信息处理的深入学习和应用…
-
单片机课程设计及个人心得感受
本科课程设计(论文)单片机控制流水灯的正常工作及外部中断控制灯的亮灭学院名称:汽车与交通工程学院专业:汽车服务工程班级:13汽服B…
-
嵌入式课程设计报告
福建工程学院嵌入式系统课程设计报告书题目基于S3C2440设备驱动及其界面设计班级姓名学号指导老师陈靖张平均李光炀2目录一设计课题…
-
嵌入式系统课程设计报告
嵌入式系统课程设计报告基于ARM的楼宇对讲系统设计摘要采用模块化设计方法设计出一款基于ARM微控制芯片和Linux操作系统的楼宇对…