�Զ�����ԭ���γ����
����һ����?����һ��ѧ��� һ ѧ��
��Ϣ��ѧ�빤��ѧԺ
�γ���Ʊ�����
�γ����ƣ� �Զ�����ԭ���γ����?
�� ���� �Զ���1001
ѧ �ţ�
�� ����
ָ����ʦ�� �⻳��
����##�� һ ��
һ�� ���Ŀ��
1���˽����ϵͳ��Ƶ�һ�㷽�������衣
2�����ն�ϵͳ�����ȶ��Է�������̬�������Լ���̬���Է����ķ����������ն�ϵͳ����У���ķ�����
3����������MATLAB�Կ����������ݽ��з������о��ļ��ܡ�
4��߷������⼰��������������
���� �����Ŀ��Ҫ��
��Ŀ����֪��λ����I��ϵͳԭ�в��ֵĿ������ݺ���Ϊ�� ����Bodeͼ��Ʒ�����ϵͳ���г�ǰ����У����ơ�
����Bodeͼ��Ʒ�����ϵͳ���г�ǰ����У����ơ�
������Bodeͼ��Ʒ�����ϵͳ���г�ǰ����У����ƣ�ʹϵͳ���㶯̬����̬��ָ�ꡣ�磺
��1��Ҫ��ϵͳ�ľ�̬�ٶ����ϵ�� ��
��
��2��ϵͳУ��������ȶ�ԣ�� ��
��
��3��ϵͳУ��������ԣ�� ��
��
���� ԭʼϵͳ�ķ���
1��ϵͳ�����������ȡ
�����Զ�����ԭ���ͱ����Ҫ����Ŀ�и���Ϊһ������ϵͳ��������Ϊ��λ�ٶ��ź�ʱ���� ,���ٶ����ϵ��Ϊ��
,���ٶ����ϵ��Ϊ��

����ϵͳ����̬��
��K 16
16 ��ȡK=16
��ȡK=16
2���ջ�ʱ����Ӧ
��Matlab �����½���M-File �ļ���
num1= [16]
den1= [0.02,1.02,1,0]
[num,den]=cloop(num1,den1)
tf(num,den) %������λ�������ıջ�����ģ��
t=[0:0.1:10]
[y,x,t]=step(num,den)
plot(t,y) %�����ջ�������ʱ����Ӧ����
grid on
xlabel('Time:t/sec')
ylabel('y')

3������Ƶ����ͼ
��Matlab �Ļ����½���M-File��
num=[16]
den=conv([1,0],conv([1,1],[0.02,1]))
G=tf(num,den) %�����������ݺ�����ģ��
bode(G) %�����������ݺ���Bodeͼ
grid on
[Gm,Pm,Wcg,Wcp]=margin(G) %PmΪ��λԣ��
gm=20*log10(Gm) %gmΪ����ԣ��
���ֵԣ�ȣ���λԣ�ȣ���ֵ��ԽƵ�ʣ���Ǵ�ԽƵ�ʣ�
Gm =3.1875����ֵԣ����
Pm =9.7739����λԣ���ȣ�
Wcg =7.0711����ֵ��ԽƵ�ʣ�
Wcp =3.9317����λ��ԽƵ�ʣ�
gm =10.0690 ������ԣ�ȣ�
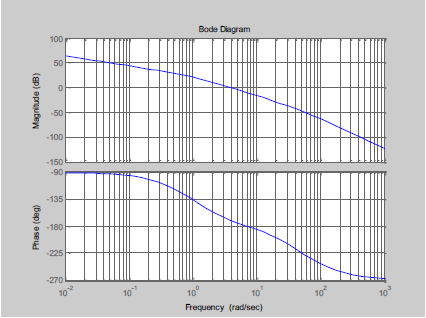
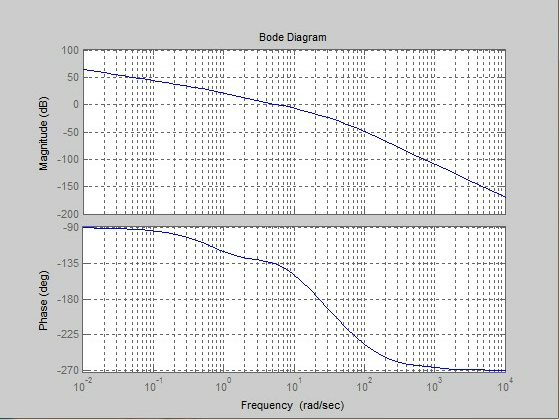
��Bodeͼ���£�
 ��
��
������Matlab �����ͼ�߿�֪����ʱ����Ӧ�����ڽ�Ծ�źŵ������£�ϵͳ�ij������ﵽ80%������ʱ��ﵽ10s ���ϣ�ϵͳ�������ࣨ����˥�������������ȶ���Ҫʱ�䳤��ϵͳ���ȶ��ԡ������ԡ�ȷ���������涼�ﲻ��Ҫ��
����Ƶ����Ӧ��Bode ͼ�ɼ���
�����ԣ��PM=
������ԣ��gm=10.0690d��>2.3d��
�ɼ�����λԣ�Ȳ���Ҫ��.�ۺ����Ϸ���,����ϵͳ���ڹ���ȱ�ݱ����ϵͳ����У��.
�ġ� ϵͳУ����Ʒ���
����һ?���ô�����ǰУ��װ�á�
��ǰУ��װ�õ�ԭ�������ó�ǰУ�����ڵ��������λ��ǰ�����������ص㣬��ϵͳ����λԣ�Ȳ���Ҫ����ͨ������һ����ǰУ��װ�ã�ʹϵͳ�ڼ���Ƶ�ʴ�����λԣ���㹻���ɳ�ǰУ��װ�õ�bode ͼ��֪����ʵ������һ����ͨ�˲�����������ת��Ƶ�ʰ�����ԭʼϵͳ�ļ���Ƶ�ʣ����ʹ��ԭʼϵͳ�Ĵ������ӣ�ͬʱ�ڼ���Ƶ
�ʴ�Ҳ�и������λԣ�ȡ�
������ĿҪ�� Ϊ�˲�����ǰУ��װ�õļ���Ƶ�ʣ�ʹ�ü���Ƶ�ʺ��ƣ�ȡ��
Ϊ�˲�����ǰУ��װ�õļ���Ƶ�ʣ�ʹ�ü���Ƶ�ʺ��ƣ�ȡ��

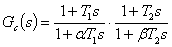
��ǰУ���Ĵ��ݺ���������
�ǰУ��װ�õ����ǰ�� ���ɼ������
���ɼ������

��
��У����ϵͳ����Ƶ�ʴ� ����У�����������ӦΪ
����У�����������ӦΪ
 lg(1/0.217)=6.64dB
lg(1/0.217)=6.64dB
����ǰ�����  ��ԭ�������Լ����δУ��ϵͳ����Ϊ -6.64 dB����Ƶ�ʼ�ΪУ����ϵͳ�ļ���Ƶ��
��ԭ�������Լ����δУ��ϵͳ����Ϊ -6.64 dB����Ƶ�ʼ�ΪУ����ϵͳ�ļ���Ƶ�� ����
����
 =40 ��
=40 �� 
�������
 =
=
У���������������Ƶ�ʷֱ�Ϊ

�Գ�ǰУ����������в������ٰѷŴ������ 
У�����ڵĴ��ݺ�����
������У��װ��������ϵͳ��Bodeͼ��Matlab���������������£�
n1=[16]
d1=conv(conv([1,0],[1,1]),[0.02,1])
s1=tf(n1,d1)
n2=[0.372,1]
d2=[0.081,1]
s2=tf(n2,d2)
sope=s1*s2; %������������
bode(sope); %�����£���ͼ
grid on %���У����ϵͳ�IJ���
[Gm,Pm,Wcg,Wcp]=margin(sope) %Pm��λԣ�ȣ�Gm��ֵԣ��
gm=20*log10(Gm) %��Gm��ΪdB��λ
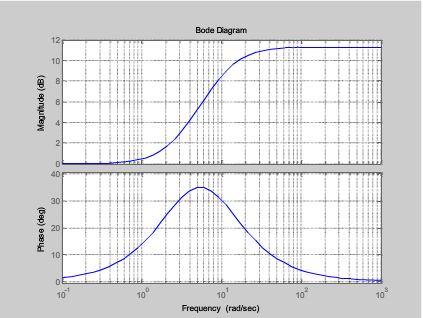
Bodeͼ���£�
Matlab����ֵ��
Gm= 8.6692 %��ֵԣ��
Pm= 43.1091 %��λԣ��
Wcg= 22.6398 %��Ǵ�ԽƵ��
Wcp= 5.8092 %����Ƶ��
gm=18.760 %����ԣ��
�����������ݣ�����У�����ϵͳ��
��̬���ϵ���� ������Ҫ��
������Ҫ��
��λ�ȶ�ԣ�ȣ� ������Ҫ��
������Ҫ��
����ԣ�ȣ� ������Ҫ��
������Ҫ��
���Ը�У�������Ƿ���ϵͳҪ���У����
�������������ͺ�У��װ��
�ͺ�У��װ�õ�ԭ�����������Ƶ��ֵ����˥���������λ�ͺ����������λ���Դ�������ϵͳ���ȶ��ԡ�����Ϊ�����ϵͳ�ĵ�Ƶ��Ӧ����С��̬��ͬʱ��֤ϵͳ����̬���ܲ��䣬�ͺ�װ�õĵ�ͨ�˲�������ʹ��ϵͳ�ĸ�Ƶ����˥��������ϵͳ�ļ���Ƶ�ʣ����ϵͳ���ȶ�ԣ�ȣ��Ը���ϵͳ����̬���ܡ�
��������ƺͷ�����֪��ԭʼϵͳ��
��λԣ�ȣ��У���������������
��ֵԣ�ȣ��ǣ��������������������
����Ƶ�ʣ��ף�𣽣�����������
ȡ��̬���ϵ���ǣ�������ϵͳҪ��
ȡУ������λԣ�ȣ�
��ȡУ����ļ���Ƶ�ʣ�δ����У����ϵͳ�ϣ����ԣ���� ����
���� �õ���
�õ���
ԭʼ�£���ͼ���� ���Ŀ�������
���Ŀ������� ������ã�
������ã�

ѡ���ͺڵĽ���Ƶ�ʣ�
�ͺڵĴ��ݺ���Ϊ����
���ãͣ�����⽫������У�����ڵģ£���ͼ���������������£�
n1=[16]
d1=conv(conv([1,0],[1,1]),[0.02,1])
s1=tf(n1,d1)
n2=[4.21,1]
d2=[70.91,1]
s2=tf(n2,d2)
sope=s1*s2; %������������
bode(sope); %����Bodeͼ
grid on
[Gm,Pm,Wcg,Wcp]=margin(sope)
gm=20*log10(Gm) %����Bodeͼ
�£���ͼ���£�
Matlab����ֵ����:
Gm= 41.4497 %��ֵԣ��
Pm= 35.2177 %��λԣ��
Wcg= 6.2133 %��Ǵ�ԽƵ��
Wcp= 0.7819 %����Ƶ��
gm= 32.3504 %����ԣ��
���Ϸ�����֪�ͺڽ���ֵԣ���ᵽ�ܸߣ�˵���Աջ��ĵ�Ƶ��Ӧ����ǿ�ҵ�˥�����ã���������Ӱ�쵽ϵͳ����Ӧ�ٶȣ�Ϊ����ͼ�� ���ұ��ƶ�����С�ͺڵ�Ƶ˥�����öԿ�����ϵͳ��Ӱ�죬������Mtlab���棺
���ұ��ƶ�����С�ͺڵ�Ƶ˥�����öԿ�����ϵͳ��Ӱ�죬������Mtlab���棺

Bodeͼ�ߣ�

��������
Matlab ����ֵ��
Gm = 37.4014 %��ֵԣ��
Pm = 30.2335 %��λԣ��
Wcg = 5.9025 %��Ǵ�ԽƵ��
Wcp = 0.7982 %����Ƶ��
gm = 31.4577 %����ԣ��
�ɼ���������Ƶ���Ժ�ֵԣ�ȱ仯��С����λԣ�����½����ƣ����������ƶ�������λԣ�ȼ���˥����ʹ�����ﵽϵͳ��Ҫ���ͺڵĵ������þͲ�����ʾ��������
��ֻ��ȡ��һ����������ܷ������⡣
�������������ͺ���ǰУ��װ��
�ͺ�-��ǰУ����ƵĻ���ԭ������������ij�ǰ����������ϵͳ�����ԣ�Ȫ�ͬʱ�����ͺ�������ϵͳ����̬���ܡ�����У�����������ͺ�У���ͳ�ǰУ�����ŵ㪥����У��ϵͳ��Ӧ�ٶȽϿ쪥��������С�����Ƹ�Ƶ����������Ҳ�Ϻá�����У��ϵͳ���ȶ�����Ҫ��У����ϵͳ����Ӧ�ٶȡ����ԣ�Ⱥ���̬���Ƚϸ�ʱ�������ͺ�-��ǰУ���Ƚ��ʺϡ� �ͺ�-��ǰУ�����Ĵ��ݺ����ɱ�ʾΪ:
�塢 ��ѷ������
1�����������ַ����ķ�����������ƾ��������ϵͳ���ܵĻ���Ҫ��ϵͳ���ȡ�����ľ���������滹��һ������������жϺ�ѡ��ϵͳУ�����װ�õı�ߡ�
���潫����Matlab �������������ϵͳ�����ܽ��з�����
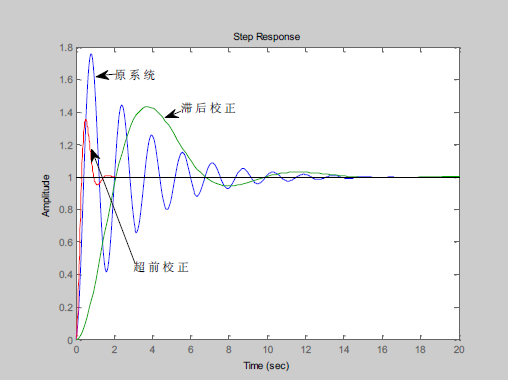
����ͼ�ɼ������ԭʼϵͳ������У�����������õ����ã����Է�����ĿҪ���ԣ��
���ȶ����ܣ��������ǵ��������ԡ�
������Ʒ���
ϵͳ�Ĵ���У���ṹͼ��

ͼ��ԭʼϵͳ�������ݺ�����
��ǰУ�����ڵĴ��ݺ�����
�����ϲ��ֿ�֪��ǰ���ڴ��ڳ������Ӵ����⣬��������Ҫ����С�ڣ����������ż�С��ǰУ����������в�������
�ãͣ�����⻭��ʱ��ͼ��
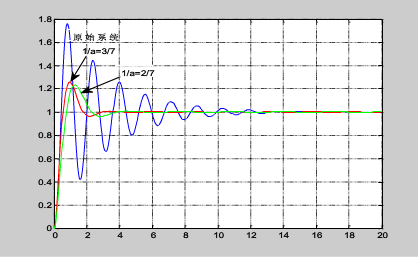
����ͼ�ɼ�������С�˶Կ�������ı��������������½����ƣ�����ͬʱϵͳ�ĵ���ʱ�䡢����ʱ��Ҳ�������������ֵ���Ҳ������������Ӧ�ٶ����ﵽ���ͳ�����Ч������˲����ѿ������潵��̫�࣬ȡͼ�� Ϊ���յ�У���������油��������
Ϊ���յ�У���������油��������
ͨ��������Ѳ���Ϊ����֤�˾�̬������ǰ������С�IJ���ֵ���õ�У�����ڵĴ��ݺ���
У��װ�õģ£���ͼ���£�
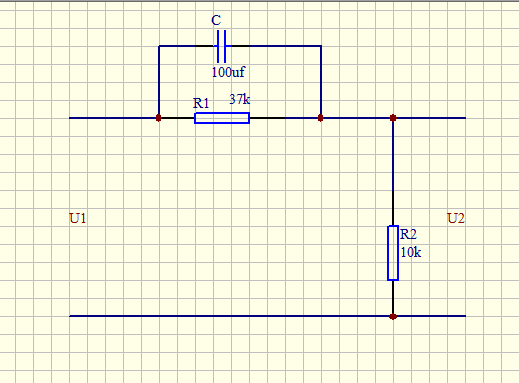
����ʵ�ֵ�У��װ�����ܵĵ�·ͼ��
 ������
������
�����
��·ͼ���£�
��̬���ϵ����������Ҫ��
��λ�ȶ�ԣ�ȣ�������Ҫ��
����ԣ�ȣ� ������Ҫ��
������Ҫ��
У����ϵͳ��ʱ����Ӧ��ԭʼϵͳ��ʱ����Ӧ�Աȣ�

����ͼ��֪�ھ���У����
ϵͳ�ij�����������Ϊ�� ��������ϵͳҪ��
��������ϵͳҪ��
��ֵʱ��
����ʱ��
����ʱ��
���� �ĵ����
��ογ���ƾ����˺ܳ�һ��ʱ��ѧϰ�����Ƕ��Զ��������۵������Matlab ����ʵ������ö��в�С���ջ���Ҫ�ǹ��ڿ���ϵͳ��У�������Լ��ļ��⡣�������õ��ij�ǰУ�����ͺ�У�����ڣ������и��Ե��ŵ��ȱ�㡣�ڹ��������ϣ����Ƕ��ܹ����϶�ϵͳ���ܽ���У����Ҫ��
��������ƹ�������������������⣬���ͺ���ǰУ���������ر����⣬���������Ū�IJ��Ǻܺã���ͨ�����ĸ������ϣ�ͬѧ֮��Ľ������ۣ����ǽ���˺ܶ�����⡣
��֮�����ογ���Ƶ��ջ��Ǻܶ�ġ����������ջ��˿α�����û�е�֪ʶ��������������֣��������Ҫ�ԣ�ϣ�����Ժ��ʱ�����ܹ���ǿ����������ѧ�����ã�
�ڶ�ƪ���Զ�����ԭ���γ���Ʊ���-��

Ŀ ¼
һ�������Ŀ����������������������������������������������3
�������Ŀ�ĺ�Ҫ��������������������������������������3
1�����Ŀ�ġ�����������������������������������������3
2�����Ҫ����������������������������������������3
�����������˼·������������������������������������������4
�ġ���ϸ��Ʋ��衭����������������������������������������4
�塢����ܽᡭ��������������������������������������������12
�����ο����ס���������������������������������������������12
һ�������Ŀ
�赥λ������ϵͳ�Ŀ������ݺ���Ϊ

����Ӧ��Ƶ����У��������ϵͳ����У����ƣ�ʹϵͳ�������¶�̬�;�̬���ܣ�
(1) ���ԣ�� ��
��
(2) �ڵ�λб�������µ���̬���Ϊ ��
��
(3) ϵͳ�ļ���Ƶ��С��7.5rad/s��
Ҫ��
��1�� �������Ҫ��˵��У�������˼·����ǰУ�����ͺ�У�����ͺ�ǰУ������
��2�� ��ϸ��ƣ�������ͼ���У�У���ṹͼ��У��ǰϵͳ��Bodeͼ��У��װ�õ�Bodeͼ��У����ϵͳ��Bodeͼ����
��3�� ��MATLAB��̴��뼰���н��������ͼ�Ρ�����������
��4�� У��ǰ��ϵͳ�ĵ�λ��Ծ��Ӧͼ��
�������Ŀ�ĺ�Ҫ��
1�����Ŀ��
��1����ͨ���γ���ƽ�һ�������Զ�����ԭ���γ̵��й�֪ʶ���������ѧ���ݵ����⣬��߽��ʵ�������������
��2�����������Զ�����ϵͳ�жԲ�ͬ��ϵͳѡ�ò�ͬ��У����ʽ���Ա�֤�õ���ѵ�ϵͳ��
��3�����������ԣ�ȣ���̬������Ƶ�ʵȲ����ĺ��塣
��4����ѧϰMATLAB���Զ������е�Ӧ�ã�������MATLAB�ṩ�ĺ����������Ҫ�õ���ʵ������
��5�����������ϰ��ն�ϵͳ����У����˼·���ܹ�������������ʵ�ʡ�
2�����Ҫ��
��1��������MATLAB�⸴�ӵ��Զ�����������Ŀ��
��2��������MATLAB��ƿ���ϵͳ��������������ָ�ꡣ
��3���������Ӧ��MATLAB����ϵͳ�����ܡ�
�����������˼·
��1����������̬��� ��ֵ��ȷ����������K��
��ֵ��ȷ����������K��
��2����������ȷ���Ŀ�������K��ȷ��У��ǰϵͳ�Ĵ��ݺ�����������bodeͼ����ͼ�Ͽ���У��ǰϵͳ����λԣ�� �ͼ���Ƶ��
�ͼ���Ƶ�� ��
��
��3����������λԣ����Ҫ�������ǰУ��װ�õIJ���a��T������У��װ�õĴ��ݺ�����Ȼ��õ�У����ϵͳ�Ŀ������ݺ�����
��4������֤��У��ϵͳ����λԣ���ͼ���Ƶ����
�ġ���ϸ��Ʋ���
��һ�����������֪���������ݺ����ڵ�λб���ź�r(t)= t�����£�Ҫ����ϵͳ����̬��� ��������̬��ʽ��
��������̬��ʽ�� ��
�� ����
����
 =
= =
=
 =
=
��ʱϵͳ����̬��



����У��ǰϵͳ�������ݺ���Ϊ����ϵͳ�ṹ��ͼ��ͼ1����

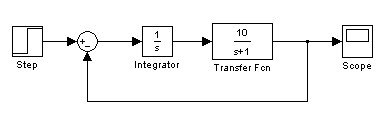
ͼ1 У��ǰϵͳ�Ľṹ��ͼ
�ڶ�����ͨ��MATLAB���Ƴ�У��ǰϵͳ��bodeͼ��У��ǰϵͳ�ĵ�λ��Ծ��Ӧͼ�ֱ���ͼ2��ͼ3��
Դ����������£�
G=tf([10],[1 1 0]);
figure(1);
margin(G);
grid on
hold on
figure(2);
sys=feedback(G,1);
step(sys)
grid on
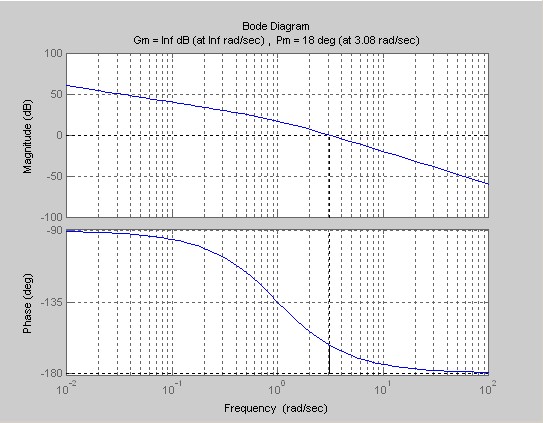
ͼ2 У��ǰϵͳ��bodeͼ
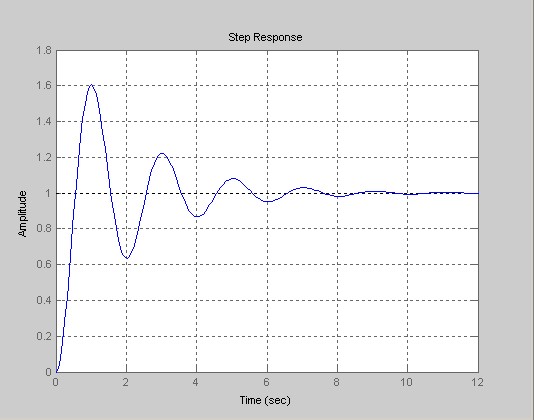
ͼ3 У��ǰϵͳ�ĵ�λ��Ծ��Ӧͼ
��ͼ2��ͼ3��֪У��ǰϵͳ��Ƶ������ָ�����£�
��ֵԣ�� =+
=+
 �� ��ԽƵ��
�� ��ԽƵ�� =+
=+ ;
;
���ԣ�� �� ����Ƶ��=3.08��
�� ����Ƶ��=3.08��
�����ϵõ������ݿ�֪������Ƶ��=3.08 7.5��У�����Ҫ�����ԣ�Ȳ�����
7.5��У�����Ҫ�����ԣ�Ȳ����� ��Ҫ����ҪУ����
��Ҫ����ҪУ����
��������ȷ��Ϊ�ﵽ���ԣ��Ҫ�������ӵij�ǰ��ǣ����ɴ˹����Ҫ������ǰ��λ ��
��
�����ӵij�ǰ���Ϊ��
Ӧ��ע�⣬��ǰУ��װ�ò����ı���bodeͼ�е�������ߣ�Ҳ�ı��˷�ֵ���ߣ���ʹ��ֵ��ԽƵ���������ƣ��ο�ͼ2�������µķ�ֵ��ԽƵ�� �ϣ�
�ϣ� ������ͺ������ˣ������dz�ǰװ�ñ��벹������һ����ͺ�������Ϊ����dz�ǰУ��װ�ò��������ǰ���ԼΪ
������ͺ������ˣ������dz�ǰװ�ñ��벹������һ����ͺ�������Ϊ����dz�ǰУ��װ�ò��������ǰ���ԼΪ

���IJ���Ȼ�����ɹ�ʽ �ã�
�ã�

Ȼ��a��ֵ���빫ʽ ��ó�ǰУ��װ����Ǵﵽ���ʱ��Ƶ��Ϊ��
��ó�ǰУ��װ����Ǵﵽ���ʱ��Ƶ��Ϊ��
��ʱ��ǰװ�õķ�ֵΪ


�������������� ʱ����ǰУ��װ��ʹϵͳ�ķ�ֵ������
ʱ����ǰУ��װ��ʹϵͳ�ķ�ֵ������ ��Ϊ��ȡ�ýϺõ���dz�ǰЧ����ѡȡУ����ϵͳ�µ����潻��Ƶ��
��Ϊ��ȡ�ýϺõ���dz�ǰЧ����ѡȡУ����ϵͳ�µ����潻��Ƶ�� ���ڴ�Ƶ���ϳ�ǰװ��Ӧ��ԭϵͳδ
���ڴ�Ƶ���ϳ�ǰװ��Ӧ��ԭϵͳδ �ķ�ֵ���Բ�������ͼ2�ж�����ֵ���߲��ԭϵͳ��ֵ
�ķ�ֵ���Բ�������ͼ2�ж�����ֵ���߲��ԭϵͳ��ֵ ʱ��Ƶ��Ϊ
ʱ��Ƶ��Ϊ ����˿ɵã�
����˿ɵã�

���岽���ٽ� ���빫ʽ
���빫ʽ ���ó�ǰУ��װ�ô��ݺ�������ṹͼ��ͼ4����
���ó�ǰУ��װ�ô��ݺ�������ṹͼ��ͼ4����


ͼ4 ��ǰУ��װ�ýṹͼ
��ǰУ��װ�õ�Bodeͼ��Դ�������£�(У��װ�õ�Bodeͼ��ͼ5)
num=[0.4306,1];
den=[0.1323,1];
G=tf(num,den);
margin(G);
grid on
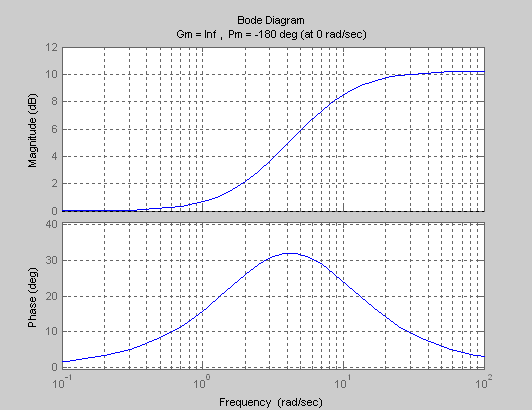
ͼ5 У��װ�õ�Bodeͼ
����������ǰУ��װ�ò���ȷ����У����ϵͳ�Ŀ������ݺ���Ϊ����ṹͼ��ͼ6��
 =
=
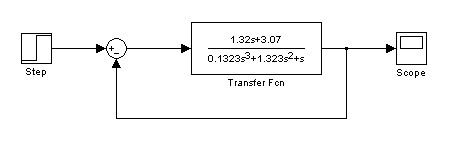
ͼ6 У����ϵͳ�Ľṹͼ
ͨ��MATLAB���Ƴ�У����ϵͳ��bodeͼ��У��ǰ��ϵͳ�ĵ�λ��Ծ��Ӧͼ�ֱ���ͼ7��ͼ8��
Դ����������£�
������
G=tf([10],[1 1 0]);
phim=8*pi/45
a=(1+sin(phim))/(1-sin(phim))
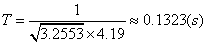
wc=4.19
T=1/(wc*sqrt(a))
Gc=(1/a)*tf([a*T 1],[T 1])
G0=Gc*G
Gc=a*Gc;
G0=Gc*G;
figure(1);margin(G0);
grid on
hold on
figure(2);sys=feedback(G0,1);
step(sys)
grid on
phim =
0.5585
a =
3.2546
wc =
4.1900
T =
0.1323
Transfer function:
0.1323 s + 0.3073
-----------------
0.1323 s + 1
Transfer function:
1.323 s + 3.073
--------------------------
0.1323 s^3 + 1.132 s^2 + s
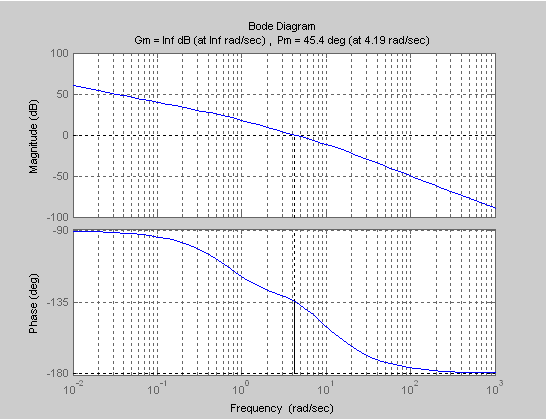
ͼ7 У����ϵͳ��bodeͼ
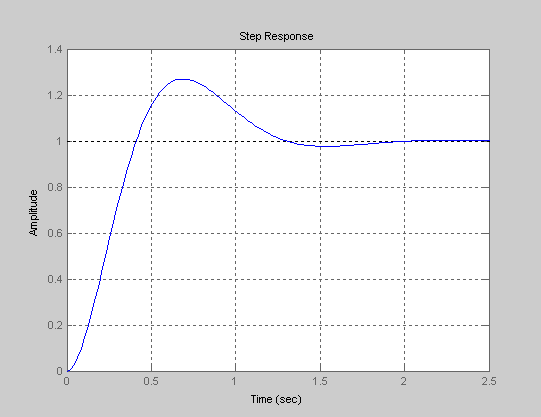
ͼ8 У����ϵͳ�Ľ�Ծ��Ӧͼ
���߲�����֤У����ϵͳ�ĸ�������ָ���Ƿ�����Ҫ���о���У��ϵͳ��bodeͼ����ͼ7�п��Կ�������ǰװ�ü���ϵͳ��ʹϵͳ�ļ���Ƶ�����Ƶ� ������˵��ϵͳ��Ƶ���������ӣ���Ӧ�ٶ��������ͬʱ�����ԣ��Ϊ
������˵��ϵͳ��Ƶ���������ӣ���Ӧ�ٶ��������ͬʱ�����ԣ��Ϊ ��ϵͳ��������Ŀ������̬�;�̬�ĸ�������ָ�꣬��ˣ�����˵У�����ϵͳ����ָ��ﵽ�˹涨��Ҫ��У��ǰ��ϵͳbode ͼ�ĶԱ���ͼ9��
��ϵͳ��������Ŀ������̬�;�̬�ĸ�������ָ�꣬��ˣ�����˵У�����ϵͳ����ָ��ﵽ�˹涨��Ҫ��У��ǰ��ϵͳbode ͼ�ĶԱ���ͼ9��
G=tf([10],[1 1 0]);
phim=8*pi/45;
a=(1+sin(phim))/(1-sin(phim));
wc=4.19;T=1/(wc*sqrt(a));
Gc=(1/a)*tf([a*T 1],[T 1]);
Gc=a*Gc;G0=Gc*G;
bode(G,'b--',G0,'r');
grid on

ͼ9 У��ǰ��ϵͳ��bode ͼ�Ա�
�����ߡ���У��ǰ��ʵ�ߡ���У����
�塢����ܽ�
ÿһ���γ���ƶ���һ����ս��
��εĿγ����Ҳ�����⡣��Ȼ������ǰѧ��һ��MATLAB�����ٿα���Ҳ���ᵽ�� MATLAB���������ǻ��Dz���ô������ͨ������Զ�����ԭ���γ����Ҹ��õ�ѧ�������ȥʹ������������Զ�����ԭ����֪ʶ�ڿ��������յ�Ҳ���Ǻܺã�������ογ���ƶ�������˵�����ѶȲ�С�����ںܶ�������Ϊ�����ܵĿγ���ƻ�����һ�ּ尾�����ǿ�������ģ��������ܵ��У����Dz���Ҫ�������γ���ƣ����һ�Ҫѧϰ����רҵ�Ρ�
����MATLAB ��ѧϰ�������ȴ���ǰ�̲��з�����ص����ݣ���Ϊ��Щ���Ͻ��ıȽϾ�����������֮����MATLAB ���˸�����˽�Ͷ�����һЩ��̣�����������ȥͼ��ݽ���ص��鼮���н���Ͳο�����Ҫ��ʲô����ʱ���������Ϸ�����Ӧ���ֵ����ݣ�����MATLAB��Ӧ�������ˡ�
�����Զ�����ԭ�������֪ʶ�������·����ü���̲ģ��ر��ǵ�����������ϸ���˽⣬��У�����˽Ϻõ���ʶ֮��ſ�ʼ���е�λ������ϵͳ��ơ�У�����ʱ������ȡֵʱ��Ҫ��У��ԭ���нϺõ��������ȡ�����ʵIJ������ڼ���Ҳ����һ�ξͳɹ���ѡ�˼��β�ѡ���ȽϺ��ʵIJ��������ֲ��ϳ��Եľ�������������һ�ֲ���̽���Ŀ�ѧ�о� ����������ڽ�������¼�����ҵ��ѧ����˵���Ǻ���Ҫ�ġ�
ÿһ�ογ���ƶ���ѧ�����ٶ�������ε�ȻҲ�����⡣�������Զ�����ԭ����֪ʶ�����ˣ�Ҳ��ǿ��MATLAB ���ǿ������ʹ�õ�ѧϰ����ογ��������˳������ˣ�������������˺ܶ������⣬������Լ���ͬѧ�Э���£�����ӭ�ж����ˡ�
���������
[1] �����.�Զ�����ԭ��.�������ӿƼ���ѧ������.1994.4
[2] ����.MATLAB���Լ�ʵ���̳�(�ڶ���).�廪��ѧ������.2009.8
[3] �ž�.MATLAB�ڿ���ϵͳ�е�Ӧ��.���ӹ�ҵ������.2007
-
�Զ�����ԭ���γ���Ʊ���
�Զ�����ԭ���γ����רҵ�����Ŀ����ϵͳ���ۺ���ư༶�Զ���0943ѧ������XXXѧ��ָ����ʦ��ԺԺ��XXX����������XX�������̡�
-
�Զ�����ԭ���γ����
�γ�ʵϰ����γ̱�ſγ�����ѧ���������ڰ༶��ϵ�绰��ֹʱ��ָ����ʦj1630122�Զ�����ԭ���γ�ʵϰ���˵���112xxxxx��
-
�Զ�����ԭ���γ����
����Ƽ�ѧԺ�γ����Ŀ¼Ŀ¼����1һ�γ���Ƶ�Ŀ�ļ���Ŀ211�γ���Ƶ�Ŀ��212�γ���Ƶ���Ŀ2���γ���Ƶ�����Ҫ��321�γ̡�
-
�Զ�����ԭ���γ����
�Զ�����ԭ���γ���Ʊ���γ������Զ�����ԭ�������Ŀ�Զ�����ԭ��MATLAB����Ժϵ�Ի�ѧԺ�༶����1�������ѧ��00417021��
-
�Զ�����ԭ���γ���Ʊ���
1������ݿ������ݺ���GsKs001s1s1�Դ��ݺ������з�������ʱ��Ƶ����켣����Ҫ��У����ϵͳ������ָ��Ϊ45ess0052�衭
-
���Զ�����ԭ�����γ�ѧϰ�ĵ����
���Զ�����ԭ�����γ�ѧϰ�ĵ����***��***��20xx�����ӿ�ѧ�뼼������һ�����ӿ�ѧ���ѧ����רҵ������Ŀ�����Ҫ���������ڵ硭
-
�Զ�����ԭ���γ���Ʊ���
�Զ�����ԭ���γ����רҵ�����Ŀ����ϵͳ���ۺ���ư༶�Զ���0943ѧ������XXXѧ��ָ����ʦ��ԺԺ��XXX����������XX�������̡�
-
�Զ�����ԭ���γ����
�γ�ʵϰ����γ̱�ſγ�����ѧ���������ڰ༶��ϵ�绰��ֹʱ��ָ����ʦj1630122�Զ�����ԭ���γ�ʵϰ���˵���112xxxxx��
-
�Զ�����ԭ���γ����
����Ƽ�ѧԺ�γ����Ŀ¼Ŀ¼����1һ�γ���Ƶ�Ŀ�ļ���Ŀ211�γ���Ƶ�Ŀ��212�γ���Ƶ���Ŀ2���γ���Ƶ�����Ҫ��321�γ̡�
-
�Զ�����ԭ���γ����
�Զ�����ԭ���γ���Ʊ���γ������Զ�����ԭ�������Ŀ�Զ�����ԭ��MATLAB����Ժϵ�Ի�ѧԺ�༶����1�������ѧ��00417021��