JBoss不能加载struts2-core-2.2.3.1.jar,提示:Could not create JarEntryRevision for……
JBoss不能加载struts2-core-2.2.3.1.jar
——提示:Could not create JarEntryRevision for……
学习Eclipse(Kepler)时,使用struts2 2.2.3.1和JBoss EAP 6.02.GA,在启动JBoss时,提示:Could not create JarEntryRevision for……\struts2-core-2.2.3.1 (文件名、目录名或卷标语法不正确。)
在网上查找很长时间才找到一个相关的帖(/topics/380025531),提供了解决办法,为了节省后来学习者的时间,特意写此文档。
原因:这是struts2在jboss下的bug问题,是xwork-core-2.2.3.1.jar的问题。
解决方案:
方法1、(https:///thread/160683)
修改xwork-core的jar包文件com.opensymphony.xwork2.util.URLUtil
//--------------------------------old code----------------------------------------------------
public static final String JBOSS5_VFSZIP = "vfszip";
public static final String JBOSS5_VFSMEMORY = "vfsmemory";
public static boolean isJBoss5Url(URL fileUrl) {
final String protocol = fileUrl.getProtocol();
return JBOSS5_VFSZIP.equals(protocol) || JBOSS5_VFSMEMORY.equals(fileUrl.getProtocol()); }
//--------------------------------end of old code-------------------------------------------
and change it to:
//--------------------------------fixed code----------------------------------------------------
public static final String JBOSS5_VFS = "vfs";
public static final String JBOSS5_VFSZIP = "vfszip";
public static final String JBOSS5_VFSMEMORY = "vfsmemory";
public static boolean isJBoss5Url(URL fileUrl) {
final String protocol = fileUrl.getProtocol();
return JBOSS5_VFS.equals(protocol) || JBOSS5_VFSZIP.equals(protocol) ||
JBOSS5_VFSMEMORY.equals(fileUrl.getProtocol());
}
方法2、
下载修正的包"xwork-core-2.3.1-SNAPSHOT.jar"替换xwork-core-2.2.3.1.jar。
根据上面的链接,找到此方法,但下载地址是错误的,就转到回复中的另一个链接:,再转到链接:,终于找到相应包的下载地址。
xwork-core-2.3.1-SNAPSHOT.jar下载地址:
张家恺2014-11-24
第二篇:Conformance Testing of Soft-Core CAN Controllers
ConformanceTestingofSoft-CoreCanControllers:
ALow-CostandPracticalApproach
ImranSheikh1andMichaelShort2
1EmbeddedSystemsLaboratory,UniversityofLeicester
UniversityRoad,LE17RH,UK
si52@le.ac.uk
2Electroincs&ControlGroup,TeessideUniversity
BoroughRoad,Middlesbrough,UK
m.short@tees.ac.uk
Abstract.Sinceitsintroductionintheearly1980’s,CANhasbecomethede-factocommunicationsprotocolemployedinvehicleandindustrialcontrolap-plications.BeforeanynewdevicecanclaimtosupportCAN-connectivity,exten-siveconformancetestingisnormallyrequiredtodemonstratecompliancewiththeprotocolatthephysicalanddatalinklayers.Tohelpstandardizethenatureofthespeci?ctestplansanddocumentationrequiredforthistesting,theISOhaspublishedasetofdraftstandardsspeci?callyforCANconformancetesting.Todate,mostcommercialCANcontrollersandtransceivershavebeenimplementedatthesiliconlevel,eitherintheformofdedicatedIC’sorason-chipperipheralsofembeddeddevices.ThepracticalimplementationofCANconformancetestershasbeenrealisedusingdedicatedhardwareandspeciallywrittenanalysissoft-ware;thisisapracticalapproachwhentestingandverifyingconformancepriortohigh-volumeICmanufacture.However,recentyearshaveseenanincreasedin-terestintheemploymentofprogrammablelogicdevicessuchasFPGA’sfortheimplementationofCANcontrollersandCAN-enableddevices.Such‘softcore’implementationsareoftenrealisedinsmall-volume(orsometimesevenone-off)batches;insuchcircumstances,costandavailabilityreasonsmaydictatethatde-veloperssimplycannotemploytraditionalCAN-conformancetestingequipment.Tohelpalleviatethisproblem,thispaperproposesalow-costandeasilyimple-mentedmethodwhichwillallowdeveloperstofullytestaCANsoftcoreim-plementation.ThemethodallowsdeveloperstoverifyaCANcoreagainsttherelevantISOstandardsusingonly(low-cost)off-the-shelfdevelopmentboards,coupledwithasimpleanalysistoolsuchasChipscope.Finally,thepaperexten-sivelydescribestheuseofthetestbedintheveri?cationofanopen-sourceCANsoftcoreimplementation.
Keywords:Controllerareanetwork,Conformancetesting,Softcore,Networkprotocolveri?cation.
1Introduction
Conformancetestingisanintegralpartofthedevelopmentstageofanynetworkpro-tocolimplementation.Whenperformedcorrectlyconformancetestingveri?es,toanJ.A.Cettoetal.(Eds.):InformaticsinControlAutomationandRobotics,LNEE85,pp.129–141.
cSpringer-VerlagBerlinHeidelberg2011springerlink.com??
130I.SheikhandM.Short
acceptabledegreeofcon?dence,thattheimplementationofgivensetofprotocolspec-i?cationshasbeencorrectlyinterpretedbythedesignersandhasbeeninstantiatedinaformthatisfreefromerrors.
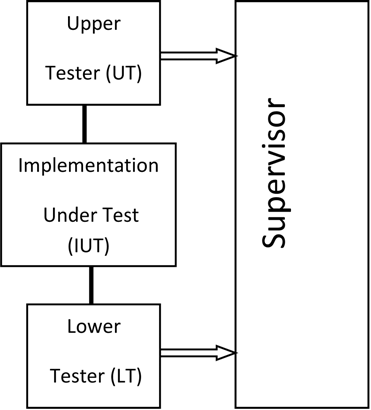
Sinceitsintroductionintheearly1980’s,theControllerAreaNetwork(CAN)pro-tocolhasbecomethede-factocommunicationsprotocolemployedinvehicleandin-dustrialcontrolapplications.InlightofthepopularityofCAN,theISOhasdevelopedastandardexclusivelyaimedatCANconformancetesting.BeforeanynewequipmentdesigncanclaimtobeCANconformant[1],evidenceisrequiredthatshowsthatthetestingproceduresoutlinedin[2]standardhavebeenperformedandpassedwithoutproblem.TheISOdocumentnotonlyspeci?esdifferenttypesofteststhatmustbeper-formedforconformancetesting,butalsospeci?esaTestPlan(TP)architecturebasedonthe[3].TherequiredTPisshownin?gure.1.Ascanbeseenfromthis?gure,theTParchitectureindicatesthatthetestershouldbedividedintotwoparts.The?rstcompo-nentistheLowerTester(LT)whichprovidesthetestpatterngenerationandanalysis.ThesecondistermedtheUpperTester(UT),whichisrequiredtocontainthesoftwaretocontroltheCANImplementationUnderTest(IUT).TheUTisnormallyahostpro-cessororprogrammabledeviceofsomekind,andalsoprovidescoordinationtoconductthetestsbetweentheLTandtheIUT[4].TheUTreceivesstimulus(withdetailsofthetestbeingperformed)fromtheLT,andgeneratesmessagespassedontotheIUT.TheIUTthenprocessesthesemessages,andboththeUTandLTcomponentsmonitoritsbehaviourforconsistencywiththeCANprotocol.Iftheresultissatisfactory,thetestisconsideredpassedandtestingproceedstothenextconformancetest.Itshouldbenotedthatthetestingproceduresthatarerequiredtobeimplementedincludecoverageofcommonerrorconditions,randomizedtestsandalsobittimingtests.Mosttestsarecritical,andthelattercategorybittimingcontainsanumberofteststhatcanbedif?-culttolocalize,andasuitablemeansisrequiredtocaptureanddisplaymultiplelogicsignalsoveranappropriatetimescale.Thistypicallyrequirestheuseofdedicatedhard-wareandLogicanalysers[5].
Traditionally,CANcontrollersandtransceivershavebeenimplementedatthesil-iconlevel,eitherbydedicatedIC’sorason-chipperipheralsofembeddeddevices.Practically,theimplementationofCANconformancetestershasbeendoneusingded-icatedhardwareandspeciallywrittenanalysissoftware,whichisapracticalapproachwhentestingandverifyingconformancepriortohigh-volumeICmanufacture.Themo-tivationforthecurrentworkisasfollows.RecentyearshaveseenanincreasedinterestintheemploymentofCAN-enableddevicesimplementedbyprogrammablehardwaredevicessuchasFPGA’s.Bytheirverynature,such‘softcore’implementationsareoftenneededinsmall-volume(orevenone-off)batches.Inthesecircumstances,costandavailabilityreasonsoftendictatethatitisnotpracticalfordeveloperstousetradi-tionalCAN-conformancetestingequipment.AnongoingprojectwithintheEmbeddedSystemsLaboratory(ESL)attheUniversityofLeicesterrequirestheuseofsuchaCANsoftcore[6].Tohelpalleviatethisproblem,thispaperproposesalow-costandeasilyimplementedmethodwhichwillallowdeveloperstotestaCANsoftcoreimple-mentationforconformancetotherelevantstandardwithouttheneedforexpensiveorproprietaryhardwareinterfacesandlogicanalysers.
ConformanceTestingofSoft-CoreCanControllers
131
Fig.1.ISO9646-1TestPlanArchitecture
Theremainderofthepaperisorganizedasfollows:InthenextSection,wewilldescribetheControllerAreaNetworkinbriefandthenwillpresentareviewofdif-ferentCANconformancetestingimplementationsofthebeforeandafterISOstandardevolved.Section3describestheformationofthecurrenttestbedforCANconformancetesting.Section4presentsthecasestudiesinvolvingtwoofthetestsbeingcarriedoutbytheproposedapproachtoCANconformance.Section5willpresenttheanalyti-calcomparisonofourapproachtotheothertechniquesusedforconformancetesting.Section6presentsourinitialconclusions.
2ControllerAreaNetwork
2.1Protocol
TheControllerAreaNetwork(orsimplyCAN)isoneofthemostwidelyemployedprotocolsforcreatingdistributedembeddedsystems,withapplicationsasfarrangingasvehicleelectronics,processcontrolandmanyotherimportantindustrialapplica-tions[1].SomeofthekeyfeaturesofCANthathaveledtoitswidespreadusein-cludelowoverheads,non-destructivebitwisemessagearbitration,lowmessagelatencyandgooderrordetectingabilities;allfeatureswhicharerequiredforcontrolapplica-tionsrunningonembeddedprocessors[7,8].Asmentioned,theprotocolemploysauniquenon-destructivepriority-basedarbitrationscheme;whenmultiplenodesattempttotransmitmessagessimultaneouslythismechanismensuresthatthehighestprioritymessagegains?rstaccesstothebus.Ifprioritiesarecarefullyassignedtothemessages,andappropriatetiminganalysisisperformed,CANmaybeusedtoimplementseveraldifferenttypesoftime-criticalsystems(e.g.see[7,8,9]).
132I.SheikhandM.Short
Thewired-ANDnatureofthephysicallayer,whichisusedtoachievetheaforemen-tionedpriority-drivenarbitration,requiresthatallnodesinthenetworkachievealogicalconsensusontheinstantaneousbit-patternsappearingonthebuslines.ThisparticularrequirementoftheprotocolactstoseverelylimitboththemaximumtransmissionspeedandbuslengthofagivenCANnetwork;themaximumtransmissionrateisinverselyproportionaltothelengthofthebus,andhasanupperlimitof1MBit/s;duetoitsdesignaCANframemaycarryuptoamaximumof8databytes.Inaddition,thismechanismplacesextremelyspeci?crequirementsonthenatureoftheconformancetestingthatmustplaceforaCANenableddevice;asigni?cantproportionoftheISOteststandardisdevotedtothissingle,criticalaspectoftheprotocol.
2.2CANConformanceTesting
OneoftheearliestCANprototypecontrollerswasnamedDBCAN[10].Thisimple-mentationwastestedusingalogicanalyserandapatterngeneratorcircuit.Astherewasnostandardforconformancetestingatthetimetheprototypewasdeveloped,acommer-cialbasic(asopposedtofull)CANcontrollerwasusedasbenchmarkforveri?cation.Amajordisadvantageofthisschemewastheuseofexternalinterfacemodulestovisu-alizethestateofdifferentDBCANregisters,andthetestingprocedurewassomewhatlimitedinthenumberofsignalchannelsthatcouldbesimultaneouslyanalysed.SincethisisaneededrequirementinthecaseofISOstandardconformancetestingtheabilitytovisualizethestateoflargenumbersofCANregisterssimultaneouslyisaprerequisitesuchasetupislimitedinthisrespect.
AHardwareemulationtechniquewasusedtoverifyaCANsoftcorein[11];?rstly,thesynthesizednetlistisdownloadedintoahardwareemulator.Thisemulatoriscon?g-uredbyaPCandthecommunicationbetweenthetwoiscarriedviaaspeciallydesignedinterfacecardconnectedtotheEISAbus;thisemulatorisalsoconnectedto2commer-ciallyavailableCANchips.Thedrawbackwiththistechniqueisthatagain,customizedhardwarealongwithsoftwareespeciallywrittentocarryouttheconformancetestingisrequired.Additionally,toemulatethebusfailuresandpotentialerrorconditionsonthebusamanualtechniqueofconnectingCANbustotheoutputofindividualnodesisemployed,whichlacksef?ciencyandisnotrobustenoughtocoverallthescenariosgivenwithinISODIS16845.
Aslightlydifferentveri?cationtechniquewasreportedby[12].Theirtechniqueemployedcustomdesignboardswith8051microcontrollersandSJA1000CANcon-trollers,butthismethodinvolvedthedesignofspecializedinterfacehardwareandboardstoassistwiththetestingplan.Specialisedveri?cationarchitecturefortestingautomotiveprotocols(includingCAN)atboththemoduleandchiplevelwasproposedby[13].Again,thisworkrequiresaspeciallydesignedCANveri?cationcomponentaspartofthesilicon,whiletheselectionandimplementationofactualtestsequences,alongwiththeselectionofasuitablemeanstomonitoringbussignals,isleftopenforthetester.
WithrespecttosoftcoreCANimplementations,theCANe-Veri?cation(CANeVC)testbenchhaspreviouslybeendescribed[14].ThiscommercialtestfacilityrequiresaCANspeci?cationcoretobeembeddedinthenetlist;thiscorethenrunsspeci?cteststoverifythebehaviouroftheCANsoftcore.Again,thistechniqueinvolvesa
ConformanceTestingofSoft-CoreCanControllers133
timeconsumingdevelopmentofatestbenchusinganexpensivecommerciallyavail-ableveri?cationIP;additionally,compatibilityissuesoftenarisewhenusingCANimplementationsotherthantheproprietaryimplementationandonlyalimitednumberofprogrammablelogicdevicesaresupported.
Finally,severalexperimentalimplementations(suchasthatreportedby[15]tomea-suresingleparameters-suchasCANbiterrors-ratherthanperformcompletecon-formancetestinghavebeendescribedintheliterature.Suchimplementationshavetypi-callyusedcomplexandnon-trivialmeans,requiringcustomizedhardwareandsoftware.Insummarythen,itcanbeobservedthat-todatespecialisedhardwareand/orsoft-warehasbeenrequiredtoassistwithCANtestingplans.InthefollowingSection,anoveltestingapproachthatreliesonlyupontheuseoflow-cost,standardoff-the-shelfhardwareandsoftwareisdescribed.
2.3ProtocolLimitation
However,theCANprotocolitselfisnotwithoutitsdrawbacks;althoughthebasicrawprotocolissuitableforuseinmanysoftreal-timesystems,itsuffersfromseveralsig-ni?cantproblemswithrespecttohardreal-timesystems,forexampleinsafety-criticaldistributedbrake-by-wiresystems.Thesedrawbacksincluderedundancyissues,atomicbroadcastproblems,lackofprotectionfrombabblingidiotfailuresandinformationthroughputrestrictions.Althoughresearchhasshownthatmanyoftheseissuescanbedealtwithbythecreationofhigher-level,software-basedprotocolextensions(e.g.see[7,8,16]),someproposedsolutionsareeithercomplextoimplementplacingasig-ni?cantcomputationaloverheadonthehostCPUorsimplycannotbeimplementedinsoftwareandahardwaresolutionmustbeadopted[17].Althoughtheproposedchangesareconceptuallyquitestraightforward,implementingthemdirectlyinsiliconiscostlyandhasprovedtobeproblematicforsmall-volumerequirements.AworkablesolutiontothisproblemistoimplementtheprotocolonaPLD;therequiredmodi?cationsmaythenbeachievedwithrelativeease.Thissolutionbringswithitanother,relatedprob-lem;beforeveri?cationofanymodi?cationscantakeplace,itmustbeshownthatthebasicsoftcoreCANimplementationisfullyconformanttotheprotocol,apotentiallycostlyandtime-consumingprocedureinitsownright.
Tohelpalleviatethisproblem,thecurrentauthorshavepreviouslyproposedalow-costandeasilyimplementedmethodinatechnicalreport[18].ThisreportessentiallydescribetheapplicationofthetechniquesdescribedinthepreviousSectiontothecon-formanceofaCANsoftcore.ThefollowingSectioncontainsadescriptionofthetestfacilitythatwasemployedinthesestudies.
3TestBed
Real-timetestingofaCANimplementationisquiteacomplicatedprocedure,andinthiscaseforpracticalreasons,nospecializedhardwareandsoftwarewasavailabletogeneratetherequiredtestingpatternsandmonitorthebehaviouroftheCANsoftcore.Forthisreason,itwasdecidedtouseonlylow-costofftheshelfcomponents.
Inadditiontothesestandardhardwareparts,theChipscopeanalysistool[19]wasusedtovisualizeandcapturethebehaviourofthesoftcore,allowingveri?cationofthe
134I.SheikhandM.

Short
Fig.2.ConformanceTestBed
testingresults.ChipscopeisaXilinxtestingtoolwhichisimplementedbyinsertingasmallcoreontothedevicetobemonitored,allowingmultiplesignalchannelstobecapturedviaaJTAGinterface.Upto16internalsignalportscanbeanalysedinasinglecore,andeachportcanhaveupto256signals.MultiplecorescanbeattachedinaFPGAtoincreasethenumberofsignals[20].IncomparisontoothermeansforcapturingmultipleFPGAsignals,Chipscoperetainsthekeyfeaturesrequiredbutisafractionofthecost.Additionally,tosupportone-offconformancetestingplanswithoutcausingexcessivecosts,afully-featuredevaluationversionisavailablefora60dayperiodafulltestingplancanbeperformedinsuchatimeframe.HencethesefeaturesofChipscopemadeitanobviouschoiceforourCANconformancetestbed.Thenewtestfacilityisshownschematicallyin?gure2.InthenextparagraphswegiveafulllistofthehardwareandsoftwarecomponentsandtoolsusedinbuildingtheTestBed.
3.1Hardware
1.TwoIntegratedboardswithFPGA’s(programmedwithCANsoftcore)andanARM7workingasaHostcontroller.TheseboardsarenamedasSC1andSC2.ThepurposeofusingtwosoftcoresistoverifysimultaneousbehaviourasaCANTransmitter/ReceiveraswellastogeneratespecialpatternsontheCANbususingVIOandadditionalsoftmodulesembeddedwiththesoftcore.
2.TwoARM7MicrocontrollerboardswithIntegratedCANcontrollerandtrans-ceivers(NodeKEandOLin?gure2).TheseboardsareusedasCANReceiverNodesforfurtherveri?cationofthemessagessentbytheCANsoftcore.Theother
ConformanceTestingofSoft-CoreCanControllers135
utilityoftheseCANnodesaretoinduceextraorerroneousbitswhichisarequire-mentoffewtestcasesasmentionedin[2].
The?gure2demonstratea2nodeSoftCore,itcaneasilybeextendedtonnumberofnodesconsideringtheprotocollimitations.
3.2Software
1.XilinxISE[21]forsoft-coreprogramming,synthesis,routingandprogrammingtheFPGA.TheISEisacompleteIDEforFPGAdevelopmentandcontainssomeextrafeatureslikepoweranalysis,optimalroutingandtiminganalysistonameafew.
2.ChipscopeProisusedasanalysistool.TheVIOcoreisusedtogenerateandcontroldifferentbitpatterns.Thesebitpatternscanbesynchronousorasynchronous.
3.TheKeiluVision3IDE[22]withfreeARMtoolsCcompilerwaschosenforprogramminganddebuggingtheMicrocontrollerboards.
Ascanbeseen,thetestbedhasbeenmadeusingCOTShardwareandalsotakingincarethestructureoftheTestPlangivenintheISO9646-1.TheTestBedconsistsoftwoinstancesoftheIUT,themainpurposeofusingthesecondIUTistogenerateerrorsontheCANbusandspecialconditionswhichwereeitherthepre-requisiteforatestcaseorgeneratingspecialbitstreamduringatestforverifyingthebehavioroftheIUT,hencethesecondinstanceofIUTismoreoverworkingastheLTinreferencetotheISO9646-1TP.
TheARMboardswithintegratedCANControllerswereusedeitherasreceivers/transmitterstoverifytheconformanceoftheIUTwithwidelyusedCANcontrollers,andwerealsoemployedtogeneratebiterrorsontheCANbususinganinterruptgen-erationmechanism.Thisschemeishighlysynchronizedasthebitinversionsweredoneatthespeci?cpointwhereitwasrequired;themethodologyemployedfortestpatterngenerationisdescribedinthenextSection.
3.3TestPatternGeneration
Whenusingpatterngeneratorstestvectorsarerequiredtobe?rststored,andaresentontheCANbusonlywhenrequiredthusputtingtheIUTindifferentstatesandallowingitsbehaviourandresponsestobeanalysed.InourproposedtestbedwehaveusedFPGAbasedpatterngeneration,whichisnotonlyeconomicalasnoextrapricewasaddedtothetestsetupbutalsoitisaddedasaseparateVerilog[23]moduletothemainCANCoreanditwillworknon-intrusivelyasthiscodispartoftheCANcorewhichistakingtheroleofanLT.Thishelpedustoaccuratelyproducespecialconditions;forexampleinatestcaseitwasneededtoproduceextradominantbitsontheCANbusafteranIUTworkingasatransmittersendanErrorFrame[2].ThistestpatternwaseasilyachievedbymodifyingtheVerilogmoduleforErrorFlaggenerationtoproduceextradominantbits,asillustratedbythecodefragment:
136I.SheikhandM.
Short
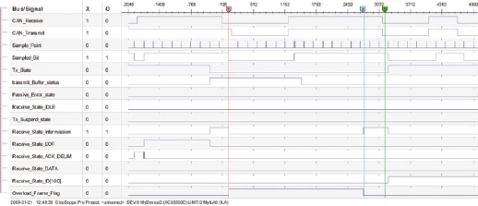
Fig.3.TransmittersnapshotforOverloadframetestcase
reg[3:0]Error_Flag_Counter;//changedfromreg[2:0]
always@(posedgeClockorposedgeReset)
begin
if(rst)
Error_Flag_Counter<=4’d0;
elseif(Error_Frame_End|Error_frame_Start)
Error_Flag_Counter<=#delay4’d0;//changedfrom3’d7
elseif(Error_Frame&Transmit_Instance&Error_Flag_Counter<4’d11))Error_Flag_Counter<=#delayError_Flag_Counter+1’b1;
end
always@(Error_frameorError_Flag_Counter)
begin
if(Error_frame)
begin
if(Error_Flag_Counter<4’d11)//changedfrom3’d7
begin
if(Node_Error_Passive)
Tx_CAN=1’b1;
else
Tx_CAN=1’b0;
end
end
end
4TestCases
TheproposedtestfacilitywasemployedtotesttheCANconformanceofthecustomcre-atedCANsoftcore,writteninVerilog.AsthenumberoftotalnumberoftestcasestoconsiderinanysingleCANconformancetestplanisnumerous,itisbeyondthescopeof
ConformanceTestingofSoft-CoreCanControllers137
thecurrentpapertopresentcomprehensivetestresults;suchtestresultsareavailableintheformoftechnicalreport[18].However,inthisSectionwewillpresenttwotestcasesthathelphighlightthemainfeaturesoftheproposedfacility.Bothtestswerecarriedoutsuccessfully,andaredescribedinthefollowingtwoSections.
4.1OverloadFrameManagement
ThistestisapartoftheOverloadFrameManagementclass[2].Thistestveri?esthatanIUTwillbeabletotransmitadataframestartingwiththeidenti?erandwithouttransmittingSOF,whendetectingadominantbitonthethirdbitoftheintermission?eld.ThistestinvolvestwoinstancesoftheIUTandtheARM7Microcontrollerboards.Thetestwillbesetupusingthefollowingorganization:
1.BothoftheIUT’smustbeindefaultstatereadyfortransmissionorreceptionaccordingtothesetupsentbytheHostController.
2.TheIUTactingastheTransmitterissettotransmittwodataframesasprogrammedintheHostprocessor.
3.TheReceiverIUTwillbesettorequestanOverloadframeafterreceptionofthe?rstframe.
4.AfterthecompletionoftheOverloadFrameonthethirdbitoftheIntermission?eld(NormallytheIntermission?eldisasequenceofthreeRecessivebits)issettodomi-nantbytheFaultinjectornodei.e.K.E.
5.Thetransmittermustnotconsideritasabiterrorandshouldn’tsendaDominantlevelSOFandconsiderthedominantbitoftheIntermission?eldastheSOF.
6.Normalreceptionofthemessageshouldtakeplace.
Thistestwassuccessfulwithdesiredresultsasstatedinthepurposeofthetest;theobser-vationonthetransmitternodefromtheChipscope-shownin?gure3isasfollows:
1.LeftofMarker‘T’TheTxstate?agishighindicatingongoingtransmission,ReceivestateDataandACKDELIMindicatingasuccessfultransmissionwhilethenodeiserroractive.
2.AtMarker‘T’thereisanerrorontheReceivestateintermission?eldgeneratinganoverloadframewithOverloadFlagofsixdominantandOverloaddelimiterof8bitsascanbeseenbythecountofsamplepoint.
3.AftertheOverloadframeanintermission?eldsignalcanbeseenattheMarker‘X’.
4.Thethirdbitofintermission?eldisisadominantbitascanbecountedbetweenMark-ers‘X’and‘O’thenumberofsamplepointsis2andthethirdsamplepointisadominantbit.
5.JustaftertheMarker‘O’wecanseetheReceiveStateID[10:0]goinghighwithoutanySOF.TheIdenti?er?rst4bitsaredominantasrequiredbytheTestcase.
4.2SuspendedTransmissionFieldTest
ThepurposeofthistestistoverifythataPassivestateIUTactingasatransmitterdoesn’ttransmitanyframebeforetheendofasuspendedTransmission?eldfollowinganErrorFrame.
138I.SheikhandM.
Short
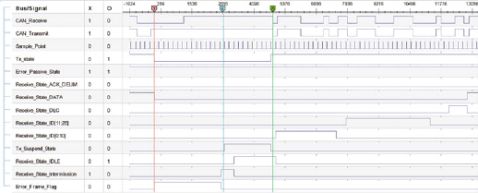
Fig.4.Transmittersnapshotforsuspendedtransmissiontestcase
ThesetupforthistestistoputtheTransmitterIUTintoErrorPassivestateandthenintroduceabiterrorduringtransmission.TheIUTwillsendaPassiveErrorFlagwhichisoverwrittenbyActiveErrorFlagfromparticipatingCANnodes,theIUTwillreceive7dominantbitsastheErrordelimiter.AfterthecompletionoftheErrorFlag,theIUTwillsendthependingdataframeoncetheSuspendedTransmissionFieldisover.
Thistestwassuccessfulwithdesiredresultsasstatedinthepurposeofthetest;theobservationonthetransmitternodefromtheChipscope-shownin?gure4isasfollows:
1.LeftofMarker‘T’TheTxstateFlagishighindicatingongoingtransmissionwhenabiterrorsetthenodetosendanErrorFrame,thenodeisErrorPassive.
2.BetweenMarker‘X’and‘O’thereisnotransmissionwhentheTxSuspendstateishighwhichisindicatedbytheTXStatelowstatusalthoughincaseoferrorrecoverythere-transmissionofthemessageiscarriedsoonaftertheintermission?eld.
3.AstheTxSuspendstateissettolowafter8bittimesthentheSOFisindicatedbyCANReceiveandCANTransmitsignalswhichchangestodominantstate.
4.RestoftheReceivestatesignalsindicatesthere-transmission.
5ComparativeStudy
ThisSectionpresentsacostand?exibilitycomparisonbetweenconventionalCANcon-formancetestinghardwareandsoftwarewiththeapproachthathasbeendiscussedinthispaper.The?rstobservationisthatthenextfacilitydoesnotrequireexpensiveCANPCinterfacecards[24,25]whicharenormallyrequiredforCANconformancetesting[26].ThesecardsareusedtocaptureCANbusdatatoanalysetheinternalstatusofdifferentreg-istersandtologtheevents;thesecardsnotonlyrequiredthehardwarebutalsospecializedsoftware[27]alongwithinterfacecableswhichcanalsoaddtothecostandcomplexityofthesetup.InourproposedimplementationwecananalysetheinternalstateofCANIUTdirectlyusingChipscope,andalsobyusingtheKeiluVision3IDE.ThisIDEcanrunanonlinedebugontheCOTSARMboards,whicharesigni?cantlycheaperincomparisontospecialisedCANinterfaceCards.TheKeilIDEcandisplaythestatusofalltheCAN
ConformanceTestingofSoft-CoreCanControllers139
registershenceprovidingususefulinformationinveri?cationofthestatusoftheCANbusandthedatabeingtransmittedandreceived.Inaddition,thereareseveralkeyadvantagesofourproposedtestbedusingChipscopeoverhardwarelogicanalysersystems:
1.Thestandardbenchanalysersdoesn’tshowenoughsignalsasrequiredincaseofCANconformanceasillustratedinsection4.ThereareLogicanalysersystemswhichcanshowlargenumberofsignalssimultaneouslywithlargedatawidths[28]buttherepricesare10timesmorethanIntegratedLogicanalyser.
2.NormalBenchanalyserscanshowMegasamples[29,28],whiletheChipscopeislim-itedtoaSamplewidthof16K,weovercomethisproblembyusingDigitalclockMan-ager[30]whichcandivideormultiplythesystemclockby‘n’times,theboardweusedinoursystemcandividethesystemclockby16timeshencewewereabletocapture16timesmoresamplethanonsystemclockwhichcaneasilycapture3to4completeCANmessagesinasingletrigger.
3.AdditionalprobeswithwidenumbersofI/OpinsarerequiredtointerfacewiththeLogicanalyserswhileChipscopecancarrymagnitudeofthesesignalsusingasimpleJTAGcable,althoughtherearefewsolutionlikeAgilent’sFPGAtraceport[31]whichuseasimpleinterfacetoanalysemultiplesignalsbutitalsorequiresaspecializedhardwareandChipscopeprotool.
4.NotonlyallI/OsignalsareaccessiblethroughChipscopebutalsointernalwirescanbetraced[32]whicharereallyhelpfulinConformancetestingspeciallywhensettinguptriggeringconditionswehavelotmoreoptionstosetupatriggerconditionforexampleinthetestcasesdiscusseditisreallyeasytosetupatriggerconditiontowaitforanErrorFrame?agsignalgoestohightoanalyseanerrorcondition,whileforexternalLogicanalysersonlyI/Osignalsareavailable.
6ConclusionsandFutureWork
InthispaperwehavepresentedanapproachtoutilizeVirtualI/OsandIntegratedLogicAnalyserstoperformCANconformancetestinginaccordancewiththeISOstandards.IthasbeenshownthatthefacilityiscapableofperformingthefullrangeoftestrequiredandspeciallyrelatedtoCANbittimingtestsconformingtotherelevantCANstandard.Inconclusion,thisfacilitycanbeassembledandusedforafractionofthecostofaregu-lartestfacilityforCANconformance.Afulllistofthehoweachindividualtestmaybeimplementedwhenusingafacilitysuchasthishasbeendescribedin[18].
Asa?nalnote,itcanbeseenthattestfacilitythathasbeendescribedisnotrestrictedtotheCANprotocol,andwithsuitablemodi?cationscanbeusedtotestconformanceofmanyalternatenetworkprotocols,forexample[33].
Acknowledgements.TheworkinthispaperissupportedbytheawardofaPhDscholar-shiptoSheikhImranfromtheNWFPUniversityofEngineering&Technology,Peshawar,PakistanthroughtheHigherEducationCommissionofPakistan.
140I.SheikhandM.Short
References
1.11898:1993(E),I.:Roadvehiclesinterchangeofdigitalinformationcontrollerareanetwork(can)forhighspeedcommunication(November1993)
2.ISO16845.Roadvehicles-controllerareanetwork(can)-conformancetestplan
3.ISO9646-1.Informationtechnology-ISO-conformancetestingmethodologyandframework-part1:Generalconcepts
4.Carmes,E.,Junier,C.,Aussedat,F.:Canconformance:Methodologyandtools,keynotespeech.In:CANinAutomationProceedingsof3rdiCC,Paris(October1996)
5.Lawrenz,W.,Kinowski,P.,Kircher,G.:Canconformancetesting-thedevelopingisostandardandnecessaryextensions.In:ProceedingsofInternationalTruckandBusMeetingandExpo-sition,Indianapolis,Indiana(November1998)
6.Sheikh,I.,Pont,M.J.,Short,M.:Hardwareimplementationofashared-clockschedulingproto-colforcan:Apilotstudy.In:4thUKEmbeddedForum,UniversityofSouthampton(September2008)
7.Short,M.,Pont,M.:Fault-toleranttime-triggeredcommunicationusingcan.IEEETransactionsonIndustrialInformatics3(2),131–142(2007)
8.Broster,I.,Burns,A.:Timelyuseofthecanprotocolincriticalhardreal-timesystemswithfaults.In:13thEuromicroConferenceonReal-TimeSystems,pp.95–102(2001)
9.Pedreiras,P.,Almeida,P.:Edfmessageschedulingoncontrollerareanetwork.ComputingandControlEngineering13(4),163–170(2002)
10.Kirschbaum,A.,Renner,F.M.,Wilmes,A.,Glesner,M.:Rapid-prototypingofacan-buscon-
troller:acasestudy.In:proceedingsofSeventhIEEEInternationalWorkshoponRapidSystemPrototyping,June1996,pp.146–151(1996)
11.Winter,A.,Bittruf,D.,Tanurhan,Y.,Muller-Glaser,K.D.:Rapidprototypingofacommuni-
cationcontrollerforthecanbus.In:ProceedingsofSeventhIEEEInternationalWorkshoponRapidSystemPrototyping,pp.152–157(1996)
12.Nimsub,K.,Dawi,K.,Kyuhyung,C.,Jinsang,K.,Wonkyung,C.:Designandveri?cationofa
cancontrollerforcustomasic.In:CANinAutomationProceedingsof10thiCC(2005)
13.Zarri,G.,Colucci,F.,Dupuis,F.,Mariani,R.,Pasquariello,M.,Risaliti,G.,Tibaldi,C.:On
theveri?cationofautomotiveprotocols.In:ProceedingsofDesign,AutomationandTestinEurope,March2006,vol.2,pp.6–10(2006)
14.DiBlasi,A.,Colucci,F.,Mariani,R.:Y-canplatform:Are-usableplatformfordesign,veri?-
cationandvalidationofcan-basedsystemsonachip.In:ETS2003Symposium(2003)
15.Ferreira,J.,Oliveira,A.,Fonseca,P.,Fonseca,J.A.:Anexperimenttoassessbiterrorratein
can.In:3rdinternationalworkshoponreal-timenetworksRTN2004,Proceedings(June2004)
16.Ayavoo,D.,Pont,M.J.,Short,M.,Parker,S.:Twonovelshared-clockschedulingalgorithmsfor
usewith’controllerareanetwork’andrelatedprotocols.MicroprocessandMicrosyst.31(5),326–334(2007)
17.Sheikh,I.,Short,M.:Improvinginformationthroughputincontrollerareanetworks:Imple-
mentingthedual-speedapproach.In:Proceedings8thInternationalWorkshoponReal-TimeNetworks,Dublin,Ireland(June2009)
18.Sheikh,I.,Short,M.:Canconformancetesting-anewapproach.In:TechnicalReporttech-
reportESL-09-01,ESL,EngineeringDepartment,UniversityofLeicester(February2009)
19.Xilinx.ChipscopeProSoftwareandCores(January2007)
20.Oltu,O.,Milea,P.,Simion,A.:Testingofdigitalcircuitryusingxilinxchipscopelogicana-
lyzer.In:ProceedingsInternationalSemiconductorConference,CAS2005,vol.2,pp.471–474(2005)
21.Xilinx.Isefoundation,/ise
22.Keil.uvisionidetool(2008),/uvision
ConformanceTestingofSoft-CoreCanControllers141
23.IEEE.IEEEstandardforveriloghardwaredescriptionlanguage.IEEEStd1364-2005(Revision
ofIEEEStd1364-2001),1–560(2006)
24.NationalInstruments.1Port,HighSpeedCAN,USBInterface(2008)
25.Softing,A.G.:CAN/CANopen/DeviceNetInterfaceboards(2007)
26.Lawrenz,W.,Kinowski,P.,Kircher,G.:Canconformancetesting-stateoftheartandtestexpe-
rience.In:Proceedingsof5thInternationalCANConference,ICC1998,SanJose,California(1998)
27.NI.Labview8.6(2009)
28.Agilent.Serieslogicanalysissystem16900mainframes(2008)
29.Tektronics.Tla5000blogicanalyzers(2009)
30.XilinxInc.UsingDigitalClockManagers(DCMs)inSpartan-3FPGAs,ApplicationNote
(2003)
31.Agilent.Deepstoragewithxilinxchipscopeproandagilenttechnologiesfpgatraceportana-
lyzer
32.Lee,T.,Fan,Y.,Yen,S.,Tsai,C.,Hsiao,R.:Anintegratedfunctionalveri?cationtoolforfpga
systems.In:SecondInternationalConferenceonInnovativeComputing,InformationandCon-trol,ICICIC2007,p.203(September2007)
33.Fuhrer,T.,Muller,B.,Dieterle,W.,Hartwich,F.:Time-triggeredcommunicationoncan(time-
triggeredcanttcan).In:ProceedingsofiCC2000,Amsterdam,TheNetherlands(2000)
-
自我评价总结
尊敬的领导,您好,我叫XXX,我于20xx年x月1号来公司报到,经过七天培训,一年的车间实习,对公司有了一定的了解,也对自己有了一…
-
供热工作总结表彰大会
20xx—20xx年度供热工作总结表彰大会同志们:大家好!春回大地、万象更新。我们告别了成绩斐然的20xx年,迎来了充满希望的20…
-
市场营销学生座谈会总结
市场营销教研室学生座谈会总结本次座谈会主要是通过学生代表,听取学生对课堂教学、教学管理、教师授课等问题的意见与建议。大部分同学通过…
-
毕业生实习总结
河南科技学院新科学院毕业生实习总结院系:经济与管理系专业:信息管理与信息系统班级:061班姓名:王蕊实习单位:新乡市政法委职位:文…
-
20xx年计免工作总结
计免工作总结一年的工作接近尾声,我院的计划免疫工作在县疾控中心和上级主管部门的正确领导下,全体职工团结一致,共同努力,圆满完成预期…