大学物理实验报告
大学物理实验报告
专业班级:自动化0222
姓 名: *******
学 号:
日 期:20##.11.28
实验设计思想和实现方法
(1)基本原理
转动惯量的测量,基本实验方法是转换测量,使物体以一定的形式运动,通过表征这种运动特征的物理量与转动惯量的关系,进行转换测量。
实验中采用扭摆法测量不同形状物体的转动惯量,就是使物体摆动,测量摆动周期,通过物体摆动周期T与转动惯量I的关系 来测量转动惯量。
来测量转动惯量。
(2)间接比较法测量,确定扭转常数K
已知标准物体的转动惯量I1,被测物体的转动惯量I0;被测物体的摆动周期T0,标准物体的摆动周期T1。通过间接比较法可测得
也可以确定出扭转常数K
定出仪器的扭转常数k值,测出物体的摆动周期T,就可计算出转动惯量I。
(3)“对称法”验证平行轴定理
平行轴定理:若质量为m的物体(小金属滑块)绕通过质心轴的转动惯量为I0时,当转轴平行移动距离x时,则此物体的转动惯量变为I0+mx2。为了避免相对转轴出现非对称情况,由于重力矩的作用使摆轴不垂直而增大测量误差。实验中采用两个金属滑块辅助金属杆的对称测量法,验证金属滑块的平行轴定理。这样,I0为两个金属滑块绕通过质心轴的转动惯量,m为两个金属滑块的质量,杆绕摆轴的转动惯量I杆,当转轴平行移动距离x时(实际上移动的是通过质心的轴),测得的转动惯量
I=I杆+I0+mx2
两个金属滑块的转动惯量
Ix=I-I杆=I0+mx2
(4)光电转换测量周期
光电门和电脑计数器组成光电计时系统,测量摆动周期。光电门(光电传感器)由红外发射管和红外接受管构成,将光信号转换为脉冲电信号,送入电脑计数器测量周期(计数测量时间)。

一.实验目的
1. 学习用扭矩摆法测定物体转动惯量的基本原理。
2. 熟悉掌握TH-I型智能转动惯量实验仪的原理、使用方法。
二.实验仪器
扭摆、转动惯量测试仪、金属载物盘、塑料圆柱体、金属细杆、天平、砝码、游标卡尺、钢尺。
1.扭摆及几种有规则的待测转动惯量的物体
实心塑料圆柱体、验证转动惯量平行轴定理用的金属细杆,杆上有两块可以自由移动的金属滑块。
2.转动惯量测试仪
由主机和光电传感器两部分组成。
主机采用新型的单片机作控制系统,用于测量物体转动和摆动的周期,以及旋转体的转速,能自动记录、存贮多组实验数据并能够精确地计算多组实验数据的平均值。

光电传感器主要由红外发射管和红外接收管组成,将光信号转换为脉冲电信号,送入主机工作。因人眼无法直接观察仪器工作是否正常,但可用遮光物体往返遮挡光电探头发射光束通路,检查计时器是否开始计时和到预定周期数时,是否停止计时。为防止过强光线对光探头的影响,光电探头不能置放在强光下,实验时采用窗帘遮光,确保计时的准确。
TH-I型智能转动惯量实验仪的使用方法:
(1)调节光电传感器在固定支架上的高度,使被测物体上的挡光杆能自由地通过光电门,再将光电传感器的信号传输线插入主机输入端(位于测试仪背面)。
(2)开启主机电源,“摆动”指示灯亮,参量指示“P1”、数据显示为“一―――”。
(3)本机默认设定扭摆的周期数为10,如要更改,按“置数”键,显示“n=10”,按“上调”键,周期数依次加1,按“下调”键,周期数依次减1,周期数只能在1~20范围内任意设定,再按“置数”键确认,显示“F1 end”,周期数一旦予置完毕,除复位和再次置数外,其它操作均不改变予置的周期数,但更改后的周期数不具有记忆功能,一旦切断电源或按“复位”键,便恢复原来的默认周期数。
(4)按“执行”键,数据显示为“000.0”,表示仪器己处在等待测量状态,此时,当被测的往复摆动物体上的挡光杆第一次通过光电门时,仪器即开始连续计时,直至仪器所设定的周期数时,便自动停止计时,由“数据显示”给出累计的时间,同时仪器自行计算周期C1予以存贮,以供查询和作多次测量求平均值,至此,P1(第一次测量)测量完毕。
(5)按“执行”键,“P1”变为“P2”,数据显示又回至“000.0”,仪器处在第二次待测状态,本机设定重复测量的最多次数为5次,即(P1,P2…P5)。通过“查询”键可知多次测量的周期值Ci,(i=1,2…5)以及它的平均值“CA”。
3. 数字式电子台秤

数字式电子台秤是利用数字电路和压力传感器组成的一种台秤。本实验所用的台秤,称量为1.999kg,分度值为1g,仪器误差为1g。使用前应检查零读数是否为“0”。若显示值在空载时不是“0”值,可以调节台秤右侧方的手轮,使显示值为“0”。物体放在称盘上即可从显示窗直接读出该物体的重量(近似看作质量m),最后一位出现±1的跳动属正常现象。
4.游标卡尺
三.实验原理
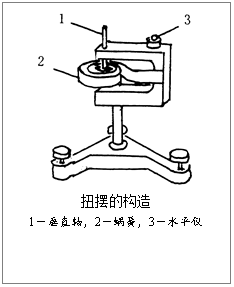
扭摆的构造如图(1)所示,在垂直轴1上装有一根薄片状的螺旋弹簧2,用以产生恢复力矩。在轴的上方可以装上各种待测物体。垂直轴与支座间装有轴承,以降低磨擦力矩。3为水平仪,用来调整系统平衡。
将物体在水平面内转过一角度θ后,在弹簧的恢
复力矩作用下物体就开始绕垂直轴作往返扭转运动。
根据虎克定律,弹簧受扭转而产生的恢复力矩M与所
转过的角度θ成正比,即
M=-Kθ (1)
式中,K为弹簧的扭转常数,根据转动定律
M=Iβ
式中,I为物体绕转轴的转动惯量,β为
角加速度,由上式得
 (2) 图 (1)
(2) 图 (1)

 令 ,忽略轴承的磨擦阻力矩,由式(1)、(2)得
令 ,忽略轴承的磨擦阻力矩,由式(1)、(2)得
上述方程表示扭摆运动具有角简谐振动的特性,角加速度与角位移成正比,且方向相反。此方程的解为:
θ=Acos(ωt+φ)
式中,A为谐振动的角振幅,φ为初相位角,ω为角速度,此谐振动的周期为

(3)
由式(3)可知,只要实验测得物体扭摆的摆动周期,并在I和K中任何一个量已知时即可计算出另一个量。
本实验用一个几何形状规则的物体,它的转动惯量可以根据它的质量和几何尺寸用理论公式直接计算得到,再算出本仪器弹簧的扭转常数K值。若要测定其它形状物体的转动惯量,只需将待测物体安放在本仪器顶部的各种夹具上,测定其摆动周期,由公式(3)即可算出该物体绕转动轴的转动惯量。

理论分析证明,若质量为m的物体绕通过质心轴的转动惯量为IO时,当转轴平行移动距离x时,则此物体对新轴线的转动惯量变为IO+mx2。这称为转动惯量的平行轴定理。
四.实验内容
1.熟悉扭摆的构造及使用方法,以及转动惯量测试仪的使用方法。
2.测定扭摆的扭转常数(弹簧的扭转常数)K。
3.测定塑料圆柱体与金属细杆的转动惯量。并与理论值比较,求百分误差。
4. 改变滑块在金属细杆上的位置,验证转动惯量平行轴定理。
四.实验步骤
1.用游标卡尺测出实心塑料圆柱体的外径D1、金属细杆长度L;用数字式电子台秤测出各物体质量m。
2.调整扭摆基座底脚螺丝,使水平仪的气泡位于中心。
3.在转轴上装上对此轴的转动惯量为IO的金属载物圆盘,并调整光电探头的位置使载物圆盘上的挡光杆处于其缺口中央且能遮住发射、接收红外光线的小孔,并能自由往返的通过光电门。测量10个摆动周期所需要的时间10T0。
4. 将转动惯量为I1的塑料圆柱体放在金属载物圆盘上,则总的转动惯量为IO+I1。
测量10个摆动周期所需要的时间10T1。
 由式(3)可得出 或
由式(3)可得出 或
则弹簧的扭转常数
 (4)
(4)
在SI制中K的单位为kg·m2·s-2(或N·m)。
5.取下塑料圆柱体,装上金属细杆,使金属细杆中央的凹槽对准夹具上的固定螺丝,并保持水平。测量10 个摆动周期需要的时间10T4。(在计算金属细杆的转动惯量时,应扣除夹具的转动惯量I夹具)。
6.验证转动惯量平衡轴定理
将金属滑块对称放置在金属细杆两边的凹槽内,如图(2)所示,此时滑块质心与转轴的距离x分别为5.00cm,10.00cm,15.00cm,20.00cm,25.00cm,测量对应于不同距离时的5个摆动周期所需要的时间10T。验证转动惯量平行轴定理。
(在计算转动惯量时,应扣除夹具的转动惯量I夹具)。
五.数据记录与处理
1.弹簧扭转常数K和各物体转动惯量I的确定,数据记录,弹簧扭转常数







2.金属载物圆盘的转动惯量

3.塑料圆柱的转动惯量

4.金属细杆的转动惯量


5.转动惯量平衡轴定理的验证,数据记录。


六.实验注意事项
1.弹簧的扭转常数K值不是固定常数,它与摆动角度略有关系,摆角在90o右基本相同,在小角度时变小。
2.弹簧有一定的使用寿命和强度,千万不要随意玩弄弹簧,为了降低实验时由于摆动角度变化过大带来的系统误差,在测定各种物体的摆动周期时,摆角不宜过小,也不宜过大,摆幅也不宜变化过大。
3.光电探头宜放置在挡光杆平衡位置处,挡光杆不能和它相接触,以免增大摩擦力矩。
4.机座应保持水平状态。
5.安装待测物体时,其支架必须全部套入扭摆主轴,并将止动螺丝旋紧,否则扭摆不能正常工作。
6.在称木球与金属细杆的质量时,必须分别将支座和夹具取下,否则将带来极大误差。
附 录
金属细杆夹具转动惯量实验值

二滑块绕通过滑块质心转轴的转动惯量理论值


测单个滑块与载物盘转动周期T=0.767S可得到:


数据记录与处理
1.弹簧扭转常数K和各物体转动惯量I的确定,数据记录,弹簧扭转常数










2.金属载物圆盘的转动惯量

3.塑料圆柱的转动惯量

4.金属细杆的转动惯量


5.转动惯量平衡轴定理的验证。
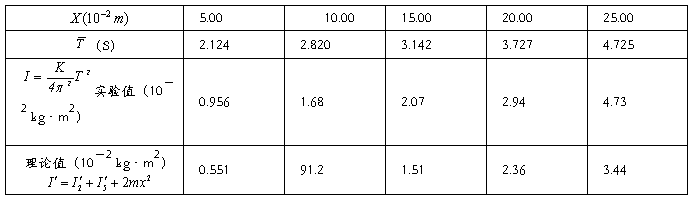
作Ix~x2图线,如下图所示。
Ix与x2的线性拟合关系为
Ix=0.0482x2+4.30
其中单位的Ix为10-3kg.m2;x2的为10-4m2。

根据图线可知,Ix与x2成线性关系,实验结果与平行轴定理相符,验证了平行轴定理。
实验总结
现在,学生的动手能力越来越被人们重视,这次设计性实验恰好给了我们锻炼的机会。实验是检验理论正确与否的试金石。为了要使你的理论被人接受,你必须用事实(实验)来证明,让那些怀疑的人哑口无言。虽说我们的物理实验只是对前人的经典实验的重复,但是对于一个知识尚浅、探索能力还不够的人来说,这些探索也非一件易事。物理实验都是一些经典的给人类带来了难以想象的便利与财富。对于这次实验,我在探索中学习、在模仿中理解、在实践中掌握。物理实验让我慢慢开始“摸着石头过河”。学习就是为了能自我学习,这正是实验课的核心,它让我在探索、自我学习中获得知识。物理实验教会了我处理数据的能力。实验就有数据,有数据就得处理,这些数据处理的是否得当将直接影响你的实验成功与否。
在物理实验中,影响物理实验现象的因素很多,产生的物理实验现象也错综复杂。我们小组通过精心设计实验方案,严格控制实验条件等多种途径,以最佳的实验方式呈现物理问题,使我们通过努力能够顺利地解决物理实验呈现的问题,考验了我们的实际动手能力和分析解决问题的综合能力,加深了我们对有关物理知识的理解。
在这次转动惯量测定的实验中,由于测量仪器、实验条件、测量方法以及人为因素的局限,测量是不可能无限精确的,测量结果与客观存在的真值之间总是存在着测量误差。误差来源是多方面的。实验中直接测的物理量有金属载物盘、塑料圆柱体、金属细杆的质量、几何尺寸和相应的周期,通过多次测量求平均值的方法来减小误差。塑料圆柱体、金属细杆的转动惯量的实验值与理论值比较,计算得到百分误差来衡量测量结果的优劣。
实验过程中,弹簧的扭转常数K值不是固定常数,它与摆动角度略有关系,摆角在90o右基本相同,在小角度时变小。为了降低实验时由于摆动角度变化过大带来的系统误差,在测定各种物体的摆动周期时,摆角不宜过小,也不宜过大,摆幅也不宜变化过大。光电探头宜放置在挡光杆平衡位置处,挡光杆不能和它相接触,以免增大摩擦力矩。机座应保持水平状态。安装待测物体时,其支架必须全部套入扭摆主轴,并将止动螺丝旋紧,否则扭摆不能正常工作。
总之,这次物理设计性实验让我收获颇丰,同时也让我发现了自身的不足。在实验课上学得的,我将发挥到其它中去,也将在今后的学习中不断提高、完善;在此间发现的不足,我将努力改善,通过学习、实践等方,克服那些不应成为学习、获得知识的障碍。在今后的学习中有更大的收获!
-
大连理工大学实验报告模版
【大物实验】拉伸法测弹性模量http://hi.baidu.com/%CE%D2%B5%C4%D3%EE%D6%AE%D6%E6/…
- RLC电流研究实验报告-大连理工大物实验
-
大连理工大学 大物实验报告 温度传感技术
这个实验操作步骤比较简单,实验过程中主要就是等待,不难。老师是武震林,人特别好。报告为什么扣分,我也不太清楚,可能是数据点没用X表…
-
大连理工大学盘锦校区大学物理实验报告页
大连理工大学大学物理实验报告实验报告完成日期学号姓名班级实验准备时间第周周第节实验完成时间第周周第节实验名称大连理工大学大学物理实…
-
大工大物实验报告——低压气体直流击穿特性
低压气体直流击穿特性实验目的1研究低气压的实验和维持方法了解气压的测量原理2观测直流暗放电的脉冲现象研究电子碰撞引起雪崩电离的过程…
-
大学物理实验——长度密度的测量心得体会1
长度与密度实验测量心得此次预约实验我们小组做的是长度与密度测量的实验这个实验看似比较简单其实却更加的需要耐心与细心因为为了保证实验…
- 大学物理实验预习报告(力学基本测量)
-
大学物理实验超声波速测量实验报告
大学物理实验超声波速测量实验报告一实验目的1.了解超声波的物理特性及其产生机制;2.学会用相位法测超声波声速并学会用逐差法处理数据…
-
实验报告长度测量
肇庆学院电子信息与机电工程学院普通物理实验课实验报告姓名王英学号25号老师评定实验题目1实验目的学习米尺游标卡尺螺旋测微计和移测显…
-
大学物理实验报告范例长度和质量的测量
实验项目长度和质量的测量实验题目长度和质量的测量实验目的1掌握米尺游标卡尺螺旋测微计等几种常用测长仪器的读数原理和使用方法2学会物…
-
大学物理实验报告模板
实验报告一.预习报告1.简要原理2.注意事项二.实验目的三.实验器材四.实验原理五.实验内容、步骤六.实验数据记录与处理七.实验结…