理论力学实验报告
刚性转子动平衡实验报告
水工91 高晨 2009010215
一、实验目的
1. 掌握刚性转子动平衡的基本原理和步骤;
2. 掌握虚拟基频检测仪和相关测试仪器的使用;
3. 了解动静法的工程应用。
二、实验内容
采用两平面影响系数法对一多圆盘刚性转子进行动平衡
三、实验原理
工作转速低于最低阶临界转速的转子称为刚性转子,反之称为柔性转子。本实验采取一种刚性转子动平衡常用的方法—两平面影响系数法。该方法可以不使用专用平衡机,只要求一般的振动测量,适合在转子工作现场进行平衡作业。
根据理论力学的动静法原理,一匀速旋转的长转子,其连续分布的离心惯性力系,可向质心C简化为过质心的一个力 (大小和方向同力系的主向量
(大小和方向同力系的主向量 )和一个力偶
)和一个力偶 (等于力系对质心
(等于力系对质心 的主矩
的主矩 ),见图一。如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力
),见图一。如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力 和力偶矩M的值均为零。这种情况称转子是平衡的。
和力偶矩M的值均为零。这种情况称转子是平衡的。
刚性转子动平衡的目标是使离心惯性力系的主向量和主矩的值同时趋近于零。为此,先在转子上任意选定两个截面I、II(称校正平面),在离轴线一定距离 、
、 (称校正半径),与转子上某一参考标记成夹角
(称校正半径),与转子上某一参考标记成夹角 、
、 处,分别附加一块质量为
处,分别附加一块质量为 、
、 的重块(称校正质量)。如能使两质量和的离心惯性力(其大小分别为
的重块(称校正质量)。如能使两质量和的离心惯性力(其大小分别为 和
和 ,
, 为转动角速度)正好与原不平衡转子的离心惯性力系相平衡,那么就实现了刚性转子的动平衡。
为转动角速度)正好与原不平衡转子的离心惯性力系相平衡,那么就实现了刚性转子的动平衡。
两平面影响系数法的过程如下;
(1)在额定的工作转速或任选的平衡转速下,检测原始不平衡引起的轴承或轴颈A、B在某方位的振动量 和
和 ,其中
,其中 和
和 是振动位移(也可以是速度或加速度)的幅值,
是振动位移(也可以是速度或加速度)的幅值, 和
和 是振动信号对于转子上参考标记有关的参考脉冲的相位角。
是振动信号对于转子上参考标记有关的参考脉冲的相位角。
(2)根据转子的结构,选定两个校正面I、II并确定校正半径、。先在平面I上加一“试重”(试质量) ,其中
,其中 为试重质量,
为试重质量, 为试重相对参考标记的方位角,以顺转向为正。在相同转速下测量轴承A、B的振动量
为试重相对参考标记的方位角,以顺转向为正。在相同转速下测量轴承A、B的振动量 和
和 。
。
(3)取走 ,在平面II上加试重
,在平面II上加试重 ,
, 为试重质量,
为试重质量, 为试重方位角。同样测得轴承A、B的振动量
为试重方位角。同样测得轴承A、B的振动量 和
和 。
。
(4)校正平面I、II上所需的校正质量 和
和 ,可通过解下列矢量方程组求得:
,可通过解下列矢量方程组求得:
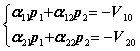
求解矢量方程最好能使用计算机.
(5)根据计算结果,在转子上安装校正质量,重新起动转子,如振动已减小到满意程度,则平衡结束,否则可重复上面步骤,再进行一次修正平衡。
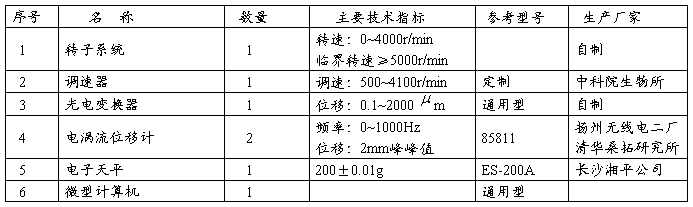
四、实验装置
测试系统部分仪器如下:
五、实验步骤
(1)左键连接虚拟测试仪器,如连线错误,可将鼠标放在该连线上,双击鼠标右键删除。确认无误后,用鼠标左键单击工具栏上▲(Show all display windows)按钮,可获得虚拟动平衡仪应用程序界面;单击▼(Hide all display windows)按钮则可回到连接画面。鼠标左键双击“812PG:A1 A/D”模块,用左键双击“1”按钮使该按钮被按下,并用右键双击“2”按钮使该按钮被弹起,然后按下“OK”,此时请确认模块右端显示的是0、1,此时代表系统0、1通道工作,测试的是A轴承座的振动。如要选择0、2,可采用上述操作方法,测试的是B轴承座的振动。
(2)将转速控制器转速 设定为1500r/min,起动转子3至5分钟使转速保持稳定。在虚拟动平衡仪应用程序界面下,用鼠标左键按下工具栏左边第一个按钮“Start”启动虚拟动平衡仪,待读数基本稳定后,记录转子原始不平衡引起左(A)轴承座振动位移的幅值和相位角
设定为1500r/min,起动转子3至5分钟使转速保持稳定。在虚拟动平衡仪应用程序界面下,用鼠标左键按下工具栏左边第一个按钮“Start”启动虚拟动平衡仪,待读数基本稳定后,记录转子原始不平衡引起左(A)轴承座振动位移的幅值和相位角 。然后用鼠标左键按下工具栏左边第三个按钮“Stop”停止虚拟动平衡仪的测试工作,设置0、2通道工作,再启动虚拟动平衡仪,待读数基本稳定后,记录转子原始不平衡引起右(B)轴承座振动位移的幅值和相位角
。然后用鼠标左键按下工具栏左边第三个按钮“Stop”停止虚拟动平衡仪的测试工作,设置0、2通道工作,再启动虚拟动平衡仪,待读数基本稳定后,记录转子原始不平衡引起右(B)轴承座振动位移的幅值和相位角 。
。
注意:此过程系统如弹出对话框,均可按“确定”按钮继续试验,如发现工具栏上左边第二个按钮处于按下状态则表明系统处于停止测试状态,必须用鼠标左键单击它使该按钮弹起,使系统激活。
(3)转速回零。在I平面(1号圆盘)上任选方位加一试重 ,记录
,记录 的值(用天平测量,可取其在6~10克间)及固定的相位角。启动转子,重新调到平衡转速,测出I平面加重后,两个轴承座振动位移的幅值和相位角(和)。
的值(用天平测量,可取其在6~10克间)及固定的相位角。启动转子,重新调到平衡转速,测出I平面加重后,两个轴承座振动位移的幅值和相位角(和)。
注意:在加试重时,不要触碰参考面(2号圆盘)上的探头,启动转子之前先用手慢慢转动圆盘,确认转子与探头没有碰触现象,间隙在1mm左右,否则报告教师重新调整探头位置。
(4)转速回零。拆除,在II平面(4号圆盘)上任选方位加一试重 。测量记录的值及其固定方位角。转速重新调到。测出II平面加试重后,两个轴承座振动位移的幅值和相位角(
。测量记录的值及其固定方位角。转速重新调到。测出II平面加试重后,两个轴承座振动位移的幅值和相位角( 和
和 )。
)。
(5)转速回零。取走,在计算机上调出已装在机内的动平衡计算程序dynbalance ,根据程序运行过程的提示,输入上述测量记录的数据。在CRT显示计算结果后,抄录有关数据及运算结果。
(6)根据求出的校正质量(平衡质量)、及校正质量的相位角、 ,在校正平面I、II重新加重。然后将转速重新调到,再测量记录两个轴承座振动的幅值和相位角。
(7)转速回零。计算平衡率(即平衡前后振动幅值的差与未平衡振幅的百分比),如高于70%,实验可结束。否则应寻找平衡效果不良原因重做。
(8)停机、关仪器电源、拉电闸。拆除平衡质量,使转子系统复原。
六、实验数据纪录及分析
平衡转速 = 1500 r/min 实验日期: 2010.11.23
= 1500 r/min 实验日期: 2010.11.23
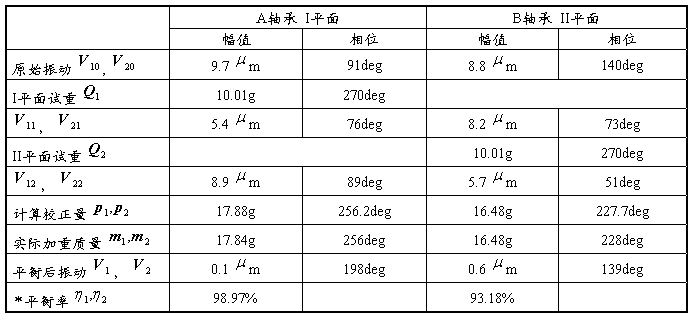
实验总结:本实验有三名同学合作完成,如果看实验中的平衡率还是相对比较好的,经过我们的思考,主要的误差产生原因有:实验中增加重量的角度是估读出来的,误差较大;实验读取计算机显示的数据时读书在不断跳动,只能根据大致波动范围读出大致数值;电子天平使用中的误差;增加的重量同计算重量有一定的差距;计算机虚拟计算产生的误差等等。
本次实验中,两个质体与计算质量仅差0.04g,对结果影响不大,而结果的平衡率为98.97%及93.18%,
矢量关系图见下页,数据记录见最后一页
关系图
第二篇:理论力学摩擦实验报告
理论力学摩擦实验报告
姓名:赵杨舒琦
学号:1151122
实验日期:20xx年5月18日
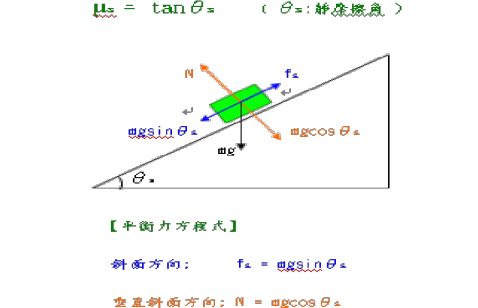
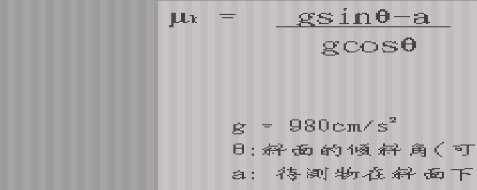
1.静摩擦系数
度数(°)
16.44 15.76 15.28 13.70 14.30
15.09 静摩擦系数 0.30 0.28 0.27 0.24 0.25 0.27
14.49
13.03
13.55
12.28
平均值
2.动摩擦系数 0.26 0.23 0.24 0.22 0.255
倾斜角度:25.00°
加速度(m/s^2)
0.486
0.469
动摩擦系数 0.41 0.41
0.341 0.408 0.381 0.310 0.371 0.330 0.265 0.298 平均值
0.43 0.42 0.42 0.43 0.43 0.43 0.44 0.43 0.425
3.翻倒与滑动问题 托盘的质量:30g 物块的质量:680g
物块的尺寸:30*30*100(mm) 倾斜角度:25度 一:翻倒
∑MA=0;
二:滑动问题
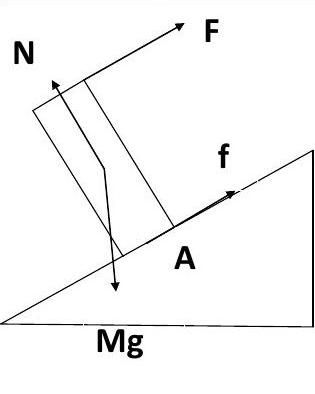
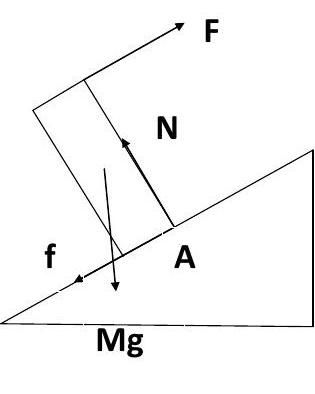
∑Ax=0;
∑Ay=0;

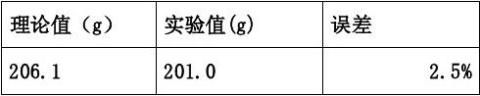
误差分析:
1.
2. 由于操作的不熟练,缺乏经验,导致部分实验数据误差比较大。 斜坡表面有损耗,导致各部分粗糙程度不完全一致 思考与总结:
1. 注重团队合作才能做好实验,本次实验培养了与合作者的团队
协作能力。
2. 在测定静摩擦系数时,对坡度的调节要尽量小心,防止因抖动
产生的实验误差。
3.
4. 做实验要实事求是,尊重事实,尊重数据。 做实验时应胆大心细,此次试验时动作不够迅速是一个缺点,
但得到的数据也较为准确,在以后的实验中将逐步改进薄弱之处。
5. 实验时要专心致志,同时应尽量保证每一次实验条件相同,减
少外因变化带来的影响,同时尽量减少人为误差。
-
工程力学 实验力学 实验报告
实验一金属试件打磨以及贴片和焊线实验目的1掌握金属试件打磨方法2初步掌握电阻应变片的粘贴技术3初步掌握焊接和检查实验设备和器材1电…
-
南理工实验力学实验报告
一实验一材料循环应力应变曲线的探究实验目的通过对材料进行循环加载并利用所获取数据绘出材料的循环应力应变曲线认识与分析材料的循环特性…
-
实验力学实验报告
纯弯曲梁正应力电测实验一实验目的1电测法测定纯弯曲梁正应力分布规律2验证纯弯曲梁正应力计算公式3计算弹性模量E二实验装置与仪器1纯…
-
材料力学实验报告答案
材料力学实验报告评分标准拉伸实验报告一、实验目的(1分)1.测定低碳钢的强度指标(s、b)和塑性指标(、)。2.测定铸铁的强度极限…
-
材料力学实验报告
实验一拉伸实验一实验目的1测定低碳钢Q235的屈服点s强度极限b延伸率断面收缩率2测定铸铁的强度极限b3观察低碳钢拉伸过程中的各种…
-
20xx年司法所工作总结
王村司法所20xx年工作总结今年以来,王村司法所在乡党委、政府的正确领导下和市局的关心指导下,以邓小平理论和“三个代表”重要思想、…
-
20xx电力职工个人工作总结
回首过去一年,工作时所发生的风风雨雨时时在眼前若隐若现,但是现实是要去面对的,在工作的时候达到忘我的境界,从不怠慢工作上的每一个细…
-
市场部员工上半年工作总结
转眼间来到市场部快半年了,在这半年中从各方面严格要求自己,时刻要有一种危机感。深深了解与市场“共存共亡”的重要性,如果不尽心尽力地…
-
函授学习总结
三年的函授学习和社会实践是我不断的挑战自我、充实自己的一个过程,本人在思想认识、业务知识和专业技能方面都有了很大的提高。现总结如下…
-
企业实践总结
中职学前教育专业骨干教师国家级培训企业实践总结在参加20xx年河北科技师范学院学前教育骨干教师国家级培训中,我们有幸去幼儿园、中专…