篇一 :运动控制系统实验报告
实验一 晶闸管直流调速系统电流-转速调节器调试
一.实验目的
1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。
2.掌握直流调速系统主要单元部件的调试步骤和方法。
二.实验内容
1.调节器的调试
三.实验设备及仪器
1.教学实验台主控制屏。
2.MEL—11组件
3.MCL—18组件
4.双踪示波器
5.万用表
四.实验方法
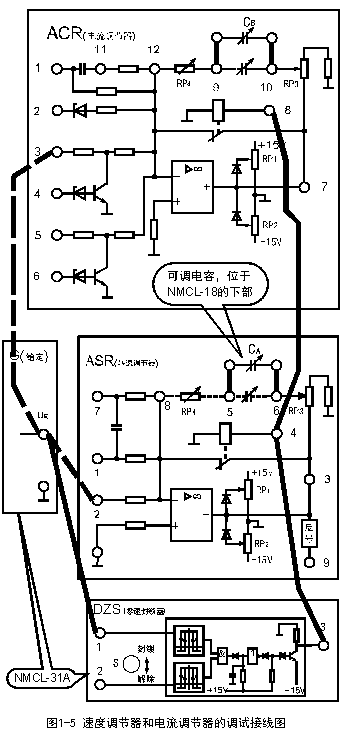
1.速度调节器(ASR)的调试
按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。
(1)调整输出正、负限幅值
“5”、“6”端 接可调电容,使ASR调节器为PI调节器,加入一定的输入电压(由MCL—18的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于±5V。
(2)测定输入输出特性
将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
(3)观察PI特性
…… …… 余下全文
篇二 :运动控制系统实验报告
运动控制系统实验报告
运动控制仿真实验报告
一、实验内容与要求
1.单闭环转速负反馈
2.转速电流双闭环负反馈
3.晶闸管相控整流双闭环直流调速系统仿真模型搭建
具体要求:针对1 2
(1)仿真各环节参数
(2)仿真模型的建立
(3)仿真结果,分为空载还是负载,有无扰动
(4)仿真结果分析
二、Simulink环境下的仿真
1.单闭环转速负反馈
1.1转速负反馈闭环调速系统仿真各环节参数
直流电动机:额定电压 =220V,额定电流
=220V,额定电流 =55A,额定
=55A,额定 =1000r/min ,电动机电动 势系数
=1000r/min ,电动机电动 势系数 =0.192V·min/r。
=0.192V·min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数 =44,滞后时间常数
=44,滞后时间常数  =0.00167s。
=0.00167s。
电枢回路总电阻R=1.0Ω,电枢回路电磁时间常 =0.00167s,电力拖动统机电时间 常数
=0.00167s,电力拖动统机电时间 常数 =0.075s。
=0.075s。
转速反馈系数α=0.01V·min/r。
对应额定转速是的给定电压 =10V。
=10V。
 1.2仿真模型的建立
1.2仿真模型的建立
图1-1单闭环转速负反馈直流调速系统的仿真模型
…… …… 余下全文


篇五 :电力系统远动原理实验报告
电力系统远动原理
实验报告
实验名称:厂站终端特性分析
电气信息学院 级
任课教师:
一. 实验名称
厂站终端特性分析
二.实验目的
1. 了解厂站终端的作用:厂站终端RTU是调度自动化系统中一个重要的组成部分,它能提供给调度主机关于电网的遥测和遥信信息,并能执行有调度主机发出的遥控和遥调命令;此外,还完成与主机间的通信功能。
2. 了解厂站终端的结构和特点;
3. 了解厂站终端的主要功能;
4. 了解厂站终端与当地监控主机通信过程和规约。
三.实验要求
1. 已对调度教材中有关调度自动化系统的结构和功能章节进行了学习,已对远动教材中有关远动系统的结构和功能章节进行了学习,建立了基本概念。
2. 实验前认真阅读实验指导书;实验中,根据实验内容,做好实验记录;实验后,写出实验报告。
3. 严格按照教师的指导进行操作。
4. 认真上机操作,建立感性认识。
四.系统结构:
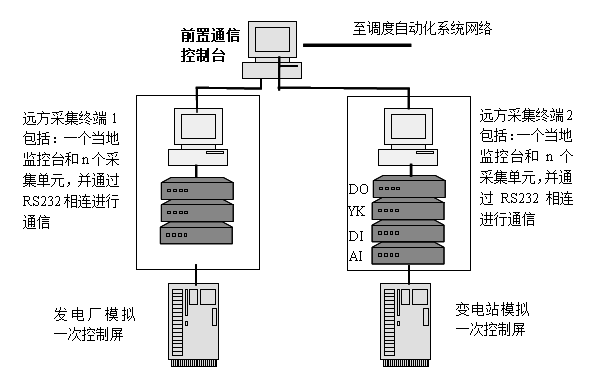
图6-1 系统结构
…… …… 余下全文
篇六 :电机与运动控制系统_实验报告2
实验报告
课程名称:《电机与运动控制系统》实验 第3次实验
实验名称:直流他励电动机在各种运行状态下的机械特性
实验时间:2015年xx月xx日
实验地点:xxxxxxxxxx组号__________
学号:xxxxxxxxxx
姓名:xxxxx
指导老师:xxxxxx 评定成绩:___________
实验三 直流他励电动机在各种运行状态下的机械特性
一、实验目的
了解直流他励电动机的各种运转状态时的机械特性。
二、预习要点
1. 改变直流电动机机械特性有哪些方法。
2. 直流电动机回馈制动及反接制动时,能量传递关系、电势平衡方程式以及机械特性。
三、实验项目
1.直流电动机电动及回馈制动特性
2.直流电动机电动及反接制动特性
3.直流电动机能耗制动特性
四、实验线路及操作步骤
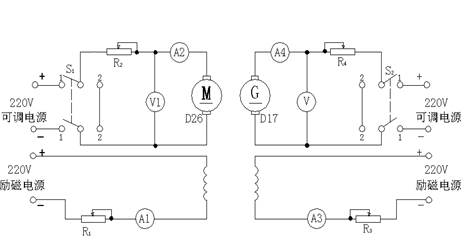
图3-1 直流他励电动机机械特性实验
实验线路如图3-1所示。图中被试直流他励电动机选用D26。其额定点为UN=220V、IN=0.55A、nN=1500r/min、PN=80W;励磁电流If<0.13A。
…… …… 余下全文
篇七 :逻辑无环流控制系统(运动控制系统)实验报告
逻辑无环流系统实验报告
一、实验目的
1.理论联系实际,把“运动控制系统”、“电力电子技术”等课程所学的理论应用于实际,掌握和巩固逻辑无环流可逆系统的组成原理和主要优缺点。
2.熟悉和掌握逻辑无环流可逆系统的调试方法和步骤。
3.通过实验,分析和研究系统的静态堵转特性及动态特性,并研究调节器参数对动态品质的影响。
4.通过实验,使同学提高实际操作能力,并在实验中培养分析和解决问题的能力。
二、实验要求与内容
2、1 预习实验
(1) 实验前必须掌握实验系统方框原理图,系统图及实验系统各个单元的工作原理。
(2) 熟悉MPD-08实验装置的结构,面板布置及系统主要设备的参数。
(3) 实验前必须认真阅读实验指导书,拟定实验的具体操作步骤,列出所需记录的数据表格,实验前由教师进行抽查,如发现末预习者,不得参加实验。
2、2 实验指标要求
(1) 电流超调量 ,并记录有关参数对
,并记录有关参数对 的影响,用理论计算并分析误差的原因。
的影响,用理论计算并分析误差的原因。
(2) 由突加给定到稳态的过渡过程中,转速超调量 ,并记录波形,用理论计算分析误差原因。
,并记录波形,用理论计算分析误差原因。
(3) 用示波器测定系统起动、制动、由正转稳态运行到反转稳态运行的过渡过程时间。
…… …… 余下全文
篇八 :运动控制实验报告 双回路闭环系统
四川大学电气信息学院
目录
? 单回路控制系统及调节器参数整定实验
实验目的………………………………………………………………….…1 实验仪器及设备…………………………………………………………….1 实验原理图……….…………………………………………………………1 实验内容和步骤………….…………………………………………………1
? 实验一:响应曲线法整定参数
实验步骤……………………………………………………………3 实验数据采集及分析..……………………………………………3
? 实验二:临界比例度法参数整定
实验步骤…………………………………………………………….7 实验数据采集及分析..……………………………………………7
? 实验三:实验参数的在线修改
实验步骤…………………………………………………………….10 实验数据采集及分析……………………………………………10
实验总结与思考…………………………………………………………10 实验心得…………………………………………………………………11
四川大学电气信息学院
运动控制系统实验
一、 实验项目名称
带电流截止负反馈的电流调速系统
…… …… 余下全文