运动控制系统专题实验报告表格
“运动控制系统”专题实验
实验报告
第二篇:运动控制系统实验报告
运动控制系统实验
一、实验目的:
1) 熟悉和掌握逻辑无环流可逆调速系统的调试方法和步骤;
2) 通过实验,分析和研究系统的动、静态特性,并研究调节的参数对动态品质的影响;
3) 通过实验,提高自身实际操作技能,培养分析和解决问题的能力。
二、实验内容:
(2)各控制单元调试;
(3)整定电流反馈系数β,转速反馈系数α,整定电流保护动作值;
(4)测定开环机械特性及高、低时速的静特性n?f(Id);
(5)闭环控制特性n?f(Id)的测定;
(6)改变调节器参数,观察、记录电流和速度走动、制动时的动态波形。
三、实验调节步骤:
1 双闭环可逆调速系统调试原则:
① 先单元,后系统;
② 先开环,后闭环;
③ 先内环,后外环
④ 先单向(不可逆),后双向(可逆)。
2 系统开环调试
(1) 系统开环调试整定:
定相分析:定相目的是根据各相晶闸管在各自的导电范围,触发器能给出触发脉冲,也就是确定触发器的同步电压与其对应的主回路电压之间的正确相位关系,因此必须根据触发器结构原理,主变压器的接线组别来确定同步变压器的接线组别。
(2) Α=90°的整定
(3) 制定移相特性
(4) 带动电机整定α和β
3 系统的单元调试
(1) ASR、ACR和反相器的调零、限幅等
(2) 逻辑单元(DLC)的转矩特性和零电流检测的调试
4 电流闭环调试(Ri,Ci,Coi等相关参数的整定)
5 转速闭环调试(Rn,Cn,Con等相关参数的整定)
四、触发器的整定
(1) 先将DJK02的触发脉冲指示开关拨至窄脉冲位置,合DJK02中的电源开关,用 示波器观察A相、B相、C相的三相锯齿波,分别调节所对应的斜率调节器,使三相锯齿波的斜率一致。
(2) 观察DJK02中VT1~VT6孔的六个双窄脉冲,使间隔均匀,相位间隔60度。
(3) 触发器移相控制特性的整定;
如图6-1所示,系统要求当Uct?0V时,??90?,电机应停止不动。因此要调
整偏移电阻Up,使??90?。
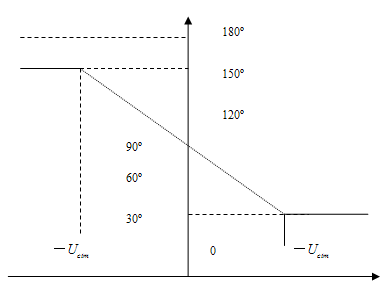
图6-2-1触发器移相控制特性
测得当??时所对应的值?,该值将作为整定ACR输U??4.02V??30?ctmmin
出
最大正限幅值的依据;测得当?时所对应的值?,U??3.17V?150?(????30?)ctmmin
该值将作为整定ACR输出最大负限幅值的依据。
五、系统的开环运行及特性测试
(1) 高速特性的测试:
逐步增加给定电压,使电动机启动、升速。调节Ug(Uct)和滑动变阻器的阻值,
?I?1.2A?1600rpm使电机电流I,转速n?n。给定Uct保持不变,做得高速特deded
性如表6-1所示。
改变滑动变阻器,使负载电流Id由1.2A下降,并记录所对应的转速和整流电压U
即可测出高速时的开环机械特性n?f(Id)。
表6-3-1 电机高速特性

d,
(2) 低速特性的测试:
调节Ug(Uct)和滑动变阻器的阻值,使电机电流Id?IN?,电机仍然旋转,0.2A转速n?100左右。测得低速特性如表6-3-2所示。 rpm
表6-3-2 电机低速特性
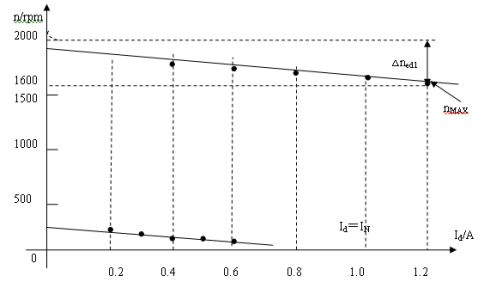


图6-3-3 电机高低速开环特性图
速度反馈特性的测试:
改变uct,使电动机的转速分别为下列表中所示,读出所对应的反馈电压ufn的大小,作出u=f(n)特性,并检查其反馈的线性度
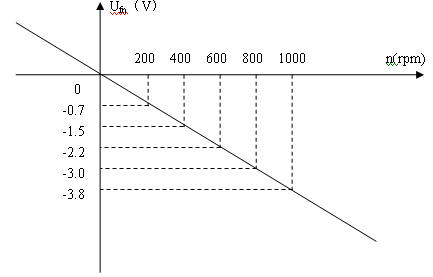
图6-3-5 电机转速反馈的线性度
六、系统单元调试
1、 电流调节器ACR的调试
先切断主电路和励磁电源开关,切断DJK02中的电源开关;合电源总开关和DJK04 中的电源控制开关,DJK04中的电源控制开关,DJK04中的给定电位器逆时针调至零位,使给定Uct为0V。
将ACR接成比例调节器,给定Uct为0V,调节放大器调零电位器RP4,使其输出为 0V。给定Ug 为正信号,其输出应为负,调节负限幅电位器RP2,使给定Ug继续增大,其值不变。给定Ug为负信号,其输出应为正,调节负限幅值=3V。当给定Ug继续增大,其值不变。
2、 速度调节器ASR的调试
调试方法同ACR的调试方法,但输出的正负限幅值为?5V。
3、 反相器AR的调试
将输出给定单元输出直接输入AR的输入端,用万用表测量输入与输出,特性就满足式(6-1)。
??U U (6-1) outin
4、 逻辑控制单元的调试
①电平检测器的调试
a) 转矩极性鉴别器DPT的调试
将输入给定单元输出直接接到DPT的输入端,用万用表或示波器观察其输出。先检测回环宽度(为0.5V左右),调节电位器RP1,使回环宽度对称纵坐标,如特性图。
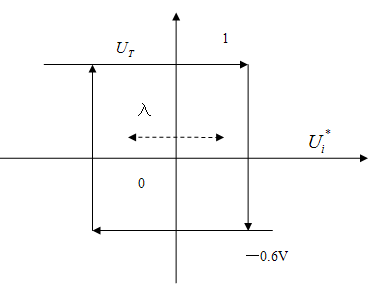
图6-4-1 入—回环特性图
b) 零电平监测器DPZ的调试
将输入给定单元输出直接接到DPZ的输入端,用万用表或示波器观察其输出。 先检测回环宽度(为0.4V左右);调节电位器RP3,使回环如图(6-4-2)所示。
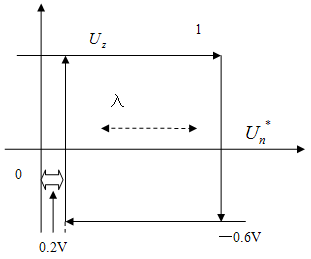
图6-4-2 DPZ特性
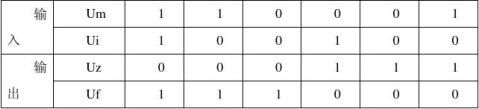
②逻辑控制器DLC的调试
DLC有两个输入端:vr和vz,若要求两个输入端同时为“1”态或“0”态,其信号可以直接从输入给定单元输出端获得;若一个为“1”态可从输入给定单元测试其逻辑功能,逻辑功真值表应如表6-4-3所示。
5、 系统整体调试
1)合保护电路开关K1→电动机励磁开关→控制电源开关→合直流高速主电源开关
K2。
2)系统动态波形的观察与性能指标分析。
① 闭环机械特性的测定n?f(Id):先将系统停下来,将发电机输出接滑动变阻器,
调节调动变阻器和速度给定,使n?n,Id?Ied?,给定不变,调节?1600rpm1.2Aed
滑动变阻器使Id下降,从而测出其高速机械特性。
低速机械特性仿照开环系统n?f(Id)方法进行。
② 调节活动变阻器,使Id?1A左右,观察系统从原始突加正向起动→正向运行→
突给正向停车的转速和电流的波形。
3)测试系统对扰动信号的抵抗能力。
电机起动后在稳态情况下,先使主回路电流Id?0.5A左右。
① 突加负载(使Id?1A),用示波器观察电动机转速变化情况;
② 突降负载(使Id?0.5A左右),同样用示波器观察电动机转速变化情况。
七、小结
在实验室模拟条件下,所设计的直流双闭环调速系统可以满足四辊冷轧机的卷取机所要求的性能指标:
%; (1)?i%?5%,?i%?10
(2)稳态时,转速无静差;
(3)能够快速起动、制动;
经过实验室的调试,系统最终能较好的运行,从灵素开始速度给定,以及突加速度给定信号,系统都能够正常地启动,升速至给定的速度值。
电动机在零速时出现蠕动,现象是左右转,这种现象有两种可能性,一是系统的晶闸管的触发的偏置电压未调整好,另外一种就是系统的回环比较整定不理想,但偏置电压已确认调整好,只有回环比较环节,因给定单元的旋钮有故障,无法比较为准确的调整回环比较参数,所以不是偏置电压的问题,而应该是回环比较的问题。而且调试中发现回环参数调整得电位器出现了误差较大,难以整定的。
系统突加给定时,开始这个速度给定难以调到很高,否则也同样出现过流跳闸报警,速度也只能在800左右突加速度给定,可能是系统的电流超调量过大,PI参数中,增大比较有利于系统的快速性,但与此同时也增加了系统的超调量,从而必须加大反馈的作用或者增加I的作用,稍微减少P的强度,按照这样,经过调试果然效果不一样,突加给定的信号可以给到很大,基本上是零至额定速度的给定范围,说明系统的参数经过整定后比较好,而且
系统在正反转情况下都可以突加给定,正常运行。
在试验中还出现了缺相的故障,导致系统转速无法升高以及出现较为明显的电流波动现象,并使电流调节器一直出去饱和输出限幅状态,使系统工作于开环状态,电流环不起作用,修股缺相故障后,系统可以正常运行。
通过本次实验,使自己加深了对电力电子技术中的三相整流、运动控制中的系统分析和验证的理解,并通过实际动手,将理论与实际相结合,提高了自己的设计和动手能力。
-
运动控制系统实验报告
实验一晶闸管直流调速系统电流转速调节器调试一实验目的1熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求2掌握直流调速…
-
运动控制系统实验报告
专业班级学号姓名学院名称运动控制仿真实验报告一实验内容与要求1单闭环转速负反馈2转速电流双闭环负反馈3晶闸管相控整流双闭环直流调速…
- 运动控制实验报告
- 运动控制系统专题实验报告表格
-
电力系统远动原理实验报告
电力系统远动原理实验报告实验名称厂站终端特性分析电气信息学院级任课教师一实验名称厂站终端特性分析二实验目的1了解厂站终端的作用厂站…
-
C++课程设计报告 运动会分数统计系统
C++课程设计报告运动会分数统计系统一.需求分析1问题描述运动会分数统计系统参加运动会有n个系,系编号为1n。比赛分成m个男子项目…
-
电机与运动控制系统_实验报告2
实验报告课程名称电机与运动控制系统实验第3次实验实验名称直流他励电动机在各种运行状态下的机械特性实验时间20xx年xx月xx日实验…
- 管理信息系统实验报告
-
管理信息系统实验报告
实验项目企业信息化及实验地点经管系机房T301实验日期20xx年6月15日实验项目电子商务系统设计实验地点经管系机房T301实验日…
-
机电系统创新与实践实验报告
机电系统创新与实践实验报告班级01311001学号1120xx0151姓名刘峰慧鱼探索者机器人一实验目的1认识了解慧鱼探索者机器人…
-
运动会计分系统程实验设计报告
重庆文理学院计算机科学与技术专业数据结构课程设计报告题目运动会计分系统班级14级计算机科学与技术姓名张超学号21458274042…