过程控制实训报告
目录页
(此处省略 写完后面内容后自己再加上该页。)
一、 概述
随着计算机控制装置在控制仪表基础上发展起来以后,自动化控制手段也越来越丰富。其中有在工业领域有着广泛应用的智能数字仪表控制系统、智能仪表加计算机组态软件控制系统、计算机DDC控制系统、PLC控制系统、DCS分布式集散控制系统、有FCS现场总线控制系统等。在现代化工业生产中,过程控制技术正为实现各种最优的技术经济指标、提高经济效益和劳动生产效率、改善劳动条件、保护生态环境等方面起越来越大的作用。
二、实训目的和任务
通过对过程控制系统与仪表的学习,再结合以前的传感与自动控制原理, 加深我们对过程控制在连续生 产过程中的自动控制.本学期我们在老师的带领下,在过程实验室进行实训.希望能够通过实训对过程控 制有更深刻的了解. 本次实训的主要内容过程控制的基本实验,由于时间和能力有限,我们只选做了其中的四个实验作为实训 的内容,并且在MATLAB环境下对其进行软件仿真。以下是一些在实训过程中需掌握的基本内容:
1)传感器特性的认识和零点迁移;
2)自动化仪表的初步使用;
3)变频器的基本原理和初步使用;
4)电动调节阀的调节特性和原理;
5)测定被控对象特性的方法;
6)单回路控制系统的参数整定;
7)串级控制系统的参数整定;
8)控制参数对控制系统的品质指标的要求;
9)控制系统的设计,计算,分析,接线,投运等综合能力;
10)各种控制方案的生成过程及控制算法程序的编制方法;
三、各仪器仪表的工作原理和使用
1、温度传感器
Pt100热电阻
工作原理:
接线说明:连接两端元件热电阻采用的是三线制接法。采用三线制接法是为了减少测量误差。因为在多数测量中,热电阻远离测量电桥,因此与热电阻相连接的导线长,当环境温度变化时,连接导线的电阻值将有明显的变化,为了消除连接导线阻值的变化而产生的测量误差,就采用了三线制接法。即在两端元件的两端分别引出两条导线,这两条导线(材料相同、长度、粗细相等)又分别加在电桥相邻的两个桥臂上,经过温度变送器变送出4~20mA信号。
如图所示:

铂电阻:提供锅炉内胆、锅炉夹套,强制对流换热系统的冷水和热水温度信号。温度范围为(0~100℃)。
温度变送器:为各个电流信号转化成(1~5V、0.2~1V等)标准电压信号提供转化电路。(通过钮子开关切换可得到50欧姆或250欧姆电路,钮子开关打到ON为50欧姆,打到OFF为250欧姆)。
2、流量计
涡轮流量计:输出信号:4~20mA,测量范围:0~0.6m3/h
接线如图所示:

接线说明:传感器的端子位于中继箱内,电缆线从中继箱的引线口接入,直流电源12V+接中继箱内正(+),中继箱内负(—)接24V-,中继箱内负(—)作为涡轮流量计输出信号负端,中继箱内A为输出信号+(正)。负载电阻则把电流信号转换成电压信号。
流量变送器:涡轮流量计输出频率信号,分别为+,-两端输出。
3、电动调节阀
电动调节阀直接接220V交流电源,由电源开关控制电源的通断,控制信号4~20mA电流输入+端接调节器输出的(4~20mA)控制信号+端,控制信号4~20mA电流输入-端接调节器输出的(4~20mA)控制信号-端。
主要技术参数:
执行机构
型式:智能型直行程执行机构
输入信号:0~10mA/4~20mADC/0~5VDC/1~5VDC
输入阻抗:250Ω/500Ω
输出信号:4~20mADC
输出最大负载:<500Ω
断信号阀位置:可任意设置为保持/全开/全关/0~100%间的任意值
电源:220V±10%/50Hz
4、单相可控硅移相调压
通过4~20mA电流控制信号控制单相220V交流电源在0~220V之间根据控制电流的大小实现连续变化。
5、变频器
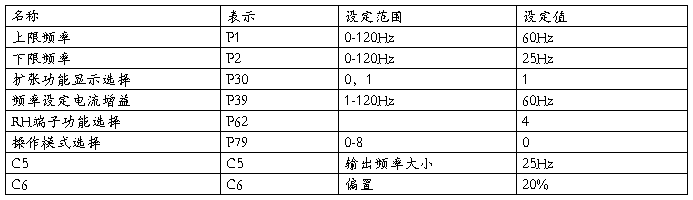
如图所示,变频器型号为三菱FR-S520S-0.4K型变频调速器,具体参数设置如下表:
 A 面板接线端子功能说明:
A 面板接线端子功能说明:
为了保护变频器各接线端子不因实验时
经常的装拆线而损坏或丢失,故将其常用的
端子引到面板上。
1、控制信号输入:可输入外部0~5V电
压,或4~20mA电流控制信号。
2、STF、STR:电机的正、反转控制端,SD与STF相连为正转,SD与STR相连时为反转。
B 本装置中变频器使用说明:
本装置中使用变频器时,主要有两种输出方式:一种是直接调面板旋钮输出频率,另一种是用外部输入控制信号使变频器输出频率。两种输出方式具体接线方法如下:
1、变频器面板旋钮输出接线方法:
SD与STF(或STR)短接,当需要改变输出频率时,旋动面板上的旋钮,顺时针旋可增大输出频率,逆时针旋可减小输出频率。待旋至所需要的频率时,按变频器上白色的SET键,即可完成面板旋钮改变输出频率。
2、变频器外部控制信号控制输出接线方法:
SD与STF(或STR)、RH两端都短接,在控制信号输入端接入控制信号(正极、负极应对应,不能接错)打开变频器的电源开关即可输出。通过改变控制信号的大小来改变输出的频率。
6、智能调节仪AI818A
如图所示
智能调节仪型号为上海万迅仪表有限公司AI818A,
 具备AI708A的全部功能特点外,还具备外给定、
具备AI708A的全部功能特点外,还具备外给定、
手动/自动切换操作、手动整定及显示输出值等功
能。具备能直接控制阀门的位置比例输出(伺服放
大器)功能,也可独立做手动操作器或伺服放大器用,此外还具备可控硅移相触发输出功能,可节省可控硅移相触发器,能精确控制温度、压力、流量、液位等各种物理量。
面板接线端子功能说明:
1、2端子:1-5V,0-5V信号输入端。(1端+,2端-)
2、3、4端子:2、3为0.2-1V信号输入端(注:0.2-1V信号必须从2、3端子输入,2端为-,3端为+);2、3、4为热电阻,热电偶信号输入端。
RSV(I/V转换):将测量或外部输入电流信号转换为电压信号后输入到1、2端或2、3端。
7、8:测量或控制电流信号输出端。
9、10:220V交流供电电源输入端。RS485通讯口:与上位机通讯接口。
智能调节仪使用参数设置:
 修改参数时,按住 键3秒,即可调出如下表第一个参数HIAL,用
修改参数时,按住 键3秒,即可调出如下表第一个参数HIAL,用 、
、 、
、 、修改参数的值。修改好第一个参数后,再按一下即可进入下一个参数的修改。
、修改参数的值。修改好第一个参数后,再按一下即可进入下一个参数的修改。
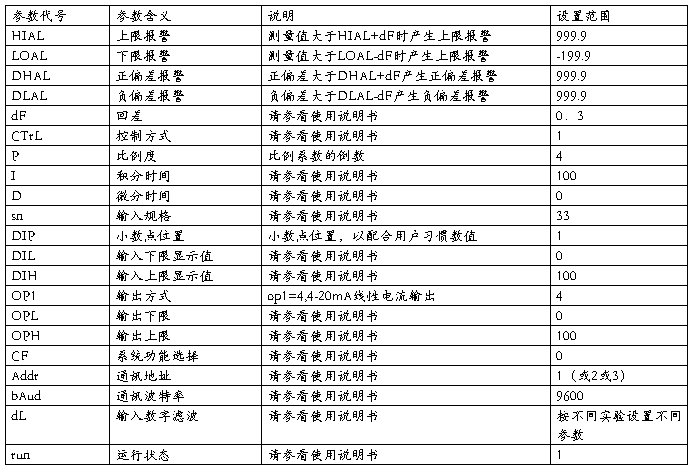
根据不同的实验,以上参数有所改变,请参看实验部分说明。
输入规格:根据实际所测的信号不同,sn=0~37之间选择

输入下限显示值DIL:用于定义线性输入信号下限刻度值,对外给定、变送输出、光柱显示均有效。例:上水箱液位传感器检测范围为0~100cm,则DIL=0,DIP=1
输入上限显示值DIH:用于定义线性输入信号上限刻度值,与DIL配合使用。例:上水箱液位传感器检测范围为0~100cm,则DIH=100,DIP=1
输出方式OP1:OP1=4,4-20mA线性电流输出。
输出下限值OPL:OPL=0 调节器输出最小值
输出上限值OPH:OPH=100 调节器输出最大值。
系统功能选择CF:CF=0 调节器为反作用;CF=1 调节器为正作用
通讯地址ADDR:ADDR=0-100 有效,作为辅助模块用于测量值变送输出时,ADDR及bAud定义对应测量值变送输出的线性电流大小,其中ADDR表示输出下限,bAud表示输出上限。单位为0.1mA。
 6、智能流量积算仪
6、智能流量积算仪
智能流量积算仪面板如右图所示:流量积算变送仪主要功能是将涡轮流量计输出的流量频率信号转换为4-20mA的电流信号输出。智能流量积算仪面板分:频率信号输入接口、变送信号输出接口、输出电流信号转换成电压信号电阻接口。(250Ω和50Ω)
流量积算仪参数设置如下:
一级参数:

具体操作方法,请查阅智能流量积算仪说明书。
四、实训实验
1、电磁流量计流量PID整定实验
(1)实验原理:
原理图如下:

(2)仪器仪表的使用
本实验主要用到的仪器仪表:智能调节仪AI88A调节仪表、电磁流量计、电动调节阀等
各仪器仪表的功能与工作过程:通过电磁流量计测量水的流速,将测得信号输入到智能调节仪,智能调节仪将测得的实际的流速、设定流速以及PID的设定参数对信号进行整定然后输出到电动调节阀,电动调节阀的开度变化会影响到水的流速,从而实现了对流速调节和整定,最终得到一个与设定流速相差不大并且稳定的实际流速。
(3)参数的调节
在进行参数调节过程中主要是对PID参数的调节,通过设定两个值不变化只变一个值的方法我们发现:比例参数Kp可以加快系统的响应速度,提高系统的调节精度,Kp增的响应速度会加快,但是会使系统产生超调,影响系统稳定性,Kp过小调节时间会加长。积分时间Ti的主要作用是消除系统的稳态误差,在控制系统中只要加了积分环节就能使系统无静差,但是积分时间过大有可能产生积分饱和。微分时间Td的主要作用是改善系统的动态性能,可以减少超调,提高系统的响应速度,但是如果Td过大的话会影响系统的抗干扰能力,影响系统的稳定性。
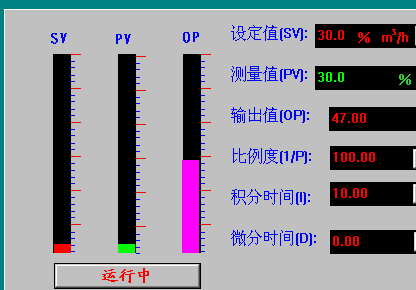
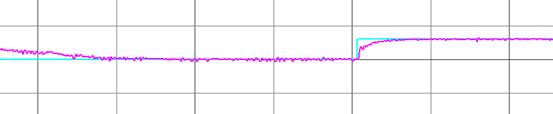
(4)最终调节结果
经过对PID参数的不断改变和调节,最终终于得到了一组比较理想的曲线!参数设置和曲线如下图:


2、涡轮流量计流量PID整定实验
(1)实验原理:
基本结构:
涡轮流量计可分为两部分:传感器部分和放大器部分。
传感器的基本结构组成由壳体、前导向架、轴、叶轮、后导向架、压紧圈等组成。
放大器主要由带磁电感应转换器的放大器组成。
前导向架和后导向架安装在壳体中,轴安装在导向架上,同时因导向架上有几片呈辐射形的整流片,还可以起一定的整流作用,使流体基本 上沿着平行于轴线的方向流动;前、后导向架是用压紧圈固定在壳体上的。
叶轮中有轴承、套在轴上,可以灵活地旋转。叶轮上均匀分布着叶片,液体流国时冲击叶片使叶轮产生转动。
工作原理:
当被测流体流经传感器时,传感器内的叶轮借助于流体的动能而产生旋转,周期性地改变磁电感应转换系统中的磁阻值,使通过线圈的磁通量周期性地发生变化而产生电脉冲信号。在一定的流量范围下,叶轮转速与流体流量成正比,即电脉冲数量与流量成正比。该脉冲信号经放大器放大后送至二次仪表进行流量和总量的显示或积算。
在测量范围内,传感器的输出脉冲总数与流过传感器的体积总量成正比,其比值称为仪表常数,以ξ(次/L)表示。每台传感器都过实际标定测得仪表常数值。当测出脉冲信号的频率f和某一段时间内的脉冲总数N后,分别除以仪表常数ξ(次/L)便可求得瞬时流量q(L/s)和累积流量Q(L)。即:q=f/ξ Q=N/ξ
(3)仪器仪表的使用
本实验主要用到的仪器仪表:流量积算变送仪、涡轮流量检测仪、智能调节仪AI88A调节仪表、变频器等
各仪器仪表的功能与工作过程:通过涡流流量计检测水的流速,送入流量积算变送仪,流量积算变送仪将测得的流量转换为4~20mA的电流信号送入智能调节仪,智能调节仪将所得的电流信号进行整定送入变频器,变频器通过改变输入频率可以改变电动机的转速,进而就可以控制水的流速,至此便实现了对于流速的调节和控制作用!最终得到一个与设定流速相差不大并且稳定的实际流速。
(4)参数的调节(由于参数整定过程基本相似,所以此处可以写“同上边一个实验”)
在进行参数调节过程中主要是对PID参数的调节,通过设定两个值不变化只变一个值的方法我们发现:比例参数Kp可以加快系统的响应速度,提高系统的调节精度,Kp增的响应速度会加快,但是会使系统产生超调,影响系统稳定性,Kp过小调节时间会加长。积分时间Ti的主要作用是消除系统的稳态误差,在控制系统中只要加了积分环节就能使系统无静差,但是积分时间过大有可能产生积分饱和。微分时间Td的主要作用是改善系统的动态性能,可以减少超调,提高系统的响应速度,但是如果Td过大的话会影响系统的抗干扰能力,影响系统的稳定性。
(4)最终调节结果
经过对PID参数的不断改变和调节,最终终于得到了一组比较理想的曲线!参数设置和曲线如下图:
参数设置
曲线
3、涡轮与电磁流量比值控制系统实验
1、 (1)实验原理:
原理图如下:

对于节流元件来说,压差与流量的平方成正比,即 ΔP∝Q2
对于图13-1单闭环比值调节系统,A,B 两个管路上的ΔP可分别写为
ΔPA=KAQA2 ΔPB=KBQB2
其中, KA、KB为放大系数。
变送器送出的信号为4-20mA电流信号,那么F1,FA有如下关系:
F1-4=CAΔPA FA-4=CBΔPB
式中CA、CB是变送器的放大系数, F1,FA是变送器的输出信号电流。比值器的输出关系为: F2-4=KC( F1-4) KC为比值器的放大系数。
则有:
F2-4=KCCB KBQB2 FA-4=CA KAQA2
由于调节器为比例积分调节,在稳态下他可保持FA =F2,故有
KCCB KBQB2 =CA KAQA2 即 (QA/QB)2=KCCB KB/CA KA
从上式可知,为使流量QA、QB的比值满足工艺要求,只要适当地调整比值器的放大系数KC即可。
(4)仪器仪表的使用
本实验主要用到的仪器仪表:智能调节仪AI88A调节仪表、电磁流量计、电动调节阀、流量积算变送仪、涡轮流量检测仪、变频器等
各仪器仪表的功能与工作过程:通过涡流流量计检测水的流速,送入流量积算变送仪,流量积算变送仪将测得的流量转换为4~20mA的电流信号送入智能调节仪,智能调节仪将所得的电流信号进行整定送入变频器,变频器通过改变输入频率可以改变电动机的转速,进而就可以控制水的流速;通过电磁流量计测量水的流速,将测得信号输入到智能调节仪,智能调节仪将测得的实际的流速、设定流速以及PID的设定参数对信号进行整定然后输出到电动调节阀,电动调节阀的开度变化会影响到水的流速。由于是比值控制所以通过设定变频器输出就可以间接的设定电磁输出的设定值,这样就可以同时控制电动机的输出和电动调节阀的输出,从而实现了对流速调节和整定,最终得到一个与两设定流速相差不大并且稳定的实际流速。
(5)参数的调节(由于参数整定过程基本相似,所以此处可以写“同上边一个实验”)
在进行参数调节过程中主要是对PID参数的调节,通过设定两个值不变化只变一个值的方法我们发现:比例参数Kp可以加快系统的响应速度,提高系统的调节精度,Kp增的响应速度会加快,但是会使系统产生超调,影响系统稳定性,Kp过小调节时间会加长。积分时间Ti的主要作用是消除系统的稳态误差,在控制系统中只要加了积分环节就能使系统无静差,但是积分时间过大有可能产生积分饱和。微分时间Td的主要作用是改善系统的动态性能,可以减少超调,提高系统的响应速度,但是如果Td过大的话会影响系统的抗干扰能力,影响系统的稳定性。
(4)最终调节结果
经过对PID参数的不断改变和调节,最终终于得到了一组比较理想的曲线!参数设置和曲线如下图
4、锅炉夹套和锅炉内胆温度串级控制系统
(1)实验原理:
1、串级控制系统的组成
2个调节器分别设置在主、副回路中,设在主回路的调节器称主调节器,设在副回路的调节器称为副调节器。两个调节器串联连接,主调节器的输出作为副回路的给定量,副调节器的输出去控制执行元件。主对象的输出为系统的被控制量锅炉夹套温度,副对象的输出是一个辅助控制变量。
2、串级系统的抗干扰能力
串级系统由于增加了副回路,对于进入副环内的干扰具有很强的抑制作用,因此作用于副环的干扰对主变量的影响就比较小,系统的主回路是定值控制,而副回环是一个随动控制。在设计串级控制系统时,要求系统副对象的时间常数要远小于主对象。此外,为了指示系统的控制精度,一般主调节器设计成PI或PID调节器,而副调节器一般设计为比例P控制,以提高副回路的快速响应。在搭实验线路时,要注意到两个调节器的极性(目的是保证主、副回路都是负反馈控制)。
3、串级控制系统与单回路的控制系统相比
串级控制系统由于副回路的存在,改善了对象的特性,使等效副对象的时间
常数减小,系统的工作频率提高,改善了系统的动态性能,使系统的响应加快,控制及时。同时,由于串级系统具有主副两只控制器的总放大倍数增大,系统的扰干扰能力的增强。因此,它的控制质量要比单回路控制系统高。
4、串级控制系统的投运和整定有一步整定法,也有两步整定法,即先整定副回路,后整定主回路。
(5)仪器仪表的使用
本实验主要用到的仪器仪表:智能调节仪AI88A调节仪表、温度测量仪、单机可控硅移相调压、变频器等
各仪器仪表的功能与工作过程:通过电磁流量计测量水的流速,将测得信号输入到智能调节仪,智能调节仪将测得的实际的流速、设定流速以及PID的设定参数对信号进行整定然后输出到电动调节阀,变频器调节电动机的频率,电动机控制另一个电动调节阀,电动调节阀的开度变化会影响到水的流速,从而实现了对流速调节和整定,进而影响温度,最终得到一个与设定温度相差不大并且稳定的实际温度。
(6)参数的调节(由于参数整定过程基本相似,所以此处可以写“同上边一个实验”)
在进行参数调节过程中主要是对PID参数的调节,通过设定两个值不变化只变一个值的方法我们发现:比例参数Kp可以加快系统的响应速度,提高系统的调节精度,Kp增的响应速度会加快,但是会使系统产生超调,影响系统稳定性,Kp过小调节时间会加长。积分时间Ti的主要作用是消除系统的稳态误差,在控制系统中只要加了积分环节就能使系统无静差,但是积分时间过大有可能产生积分饱和。微分时间Td的主要作用是改善系统的动态性能,可以减少超调,提高系统的响应速度,但是如果Td过大的话会影响系统的抗干扰能力,影响系统的稳定性。
(4)最终调节结果
经过对PID参数的不断改变和调节,最终终于得到了一组比较理想的曲线!参数设置和曲线如下图
五、软件(MATLAB)仿真
1、简单比值控制系统的仿真
(1)相关的传递函数
被控对象的数学模型为假设双闭环比值控制系统中的主动量控制系统的数学模型为式(1),从动量控制系统的数学模型为式(2)。
G(s)= (1) G(s)=
(1) G(s)=
(2)建立仿真模型及参数调节
在matlab的simulink环境中建立系统仿真模型,并进行参数调节。根据波形显示窗口所显示的波形,以及增加比例系数可加快系统的响应速度和减小系统误差,两者结合不断调试,最终调试出比较理想的波形。模型和波形图如下:
见附图1
2.温度单回路和串级控制系统的仿真
(1)数学模型
主被控对象的数学模型为 ,副被控对象的数学模型为
,副被控对象的数学模型为 ,主、副控制器的传递函数
,主、副控制器的传递函数 ,
, 。
。
(2)建立单回路和串级控制系统无干扰情况下的模型和参数调节
在matlab的simulink环境中建立系统仿真模型,根据比例调节具有提高系统响应速度和减小系统误差和积分调节具有减小和消除误差,但也会增加系统不稳定性的作用,我们采取尝试和经验法得到了比较理想的参数和波形。模型和波形图如下图:
见附图2
(3)建立单回路和串级控制系统有干扰情况下的模型和参数调节
在matlab的simulink环境中建立系统仿真模型,根据比例调节具有提高系统响应速度和减小系统误差和积分调节具有减小和消除误差,但也会增加系统不稳定性的作用,我们采取尝试和经验法得到了比较理想的参数和波形。我们在200s和500s各加一个干扰,对比单回路和串级控制系统波形,可见串级控制系统具有对于进入副回路的干扰有很强的抑制作用。所以串级控制系统的控制质量要比单回路控制系统高。模型和波形如下图:
见附图3
七 四,实训心得
本次过程控制的实训使我们受益匪浅,由于在课堂上所学得理论知识比较枯燥无味而且难懂,但在实 验中通过动手操作,使我们了解了一些在课堂上学不到的知识,也加强了对理论知识的了解.通过实训, 我们对实验设备有了深刻的了解,了解了连续生产过程的自动控制,可以说在实训中学到的知识比书本上 的更重要,因为很快就要参加工作,良好的动手能力对以后在工作岗位上还是很有好处的.但是实训的时 间比较短暂,只有一个星期,如果还有时间话,我们就可以完成更多的实验内容.当然在这里还要感谢老 师和同学们对我的帮助,有了大家齐心协力才能更好的完成任务.
八、参考文献
1、 过程控制与自动化仪表, 作者: 高志宏, 版本: 第1版, 浙江大学出版社
2、
微计算机信息 文献:基于组态软件和Matlab的PID控制
http://doc.51daifu.net/doc_pM6584116a8dff9f091e3849c69f6bd186115ac5f4d387cf4e73575862c9e70de1b0
3、过程控制及自动化仪表 作 者:武平丽出版社: 化学工业出版社出版时间: 2007ISBN:
第二篇:08自动化过程控制实训报告
综合实训报告书

备注:本报告书只给定报告内容的样式,学生撰写报告书时根据实际情况内容可以调整栏目大小
-
过程控制实训报告
1目录页此处省略写完后面内容后自己再加上该页2一概述随着计算机控制装置在控制仪表基础上发展起来以后自动化控制手段也越来越丰富其中有…
-
过程控制系统实习报告
目录1单容水箱设备组成及其工艺111单容水箱设备的组成112单容水箱设备的工作原理12单容水箱控制系统的硬件设计221电气原理图的…
-
过程控制实训报告总结
重庆科技学院学生实习(实训)总结报告院(系):电气与信息工程学院专业班级:测控普-07学生姓名:***学号:****实习(实训)地…
-
过程控制工程实习报告
过程控制工程实习报告指导老师:实习时间:小组成员:院系:班级:姓名:学号:年月日一、实习目的、意义过程控制工程实习的目的是培养我们…
-
过程控制实习报告
工厂生产实习报告学院:电气与控制工程学院班级:测控技术与仪器1002班姓名:孟庆峰学号:1006070233日期:20xx年x月x…
-
过程控制实习报告
工厂生产实习报告学院:电气与控制工程学院班级:测控技术与仪器1002班姓名:孟庆峰学号:1006070233日期:20xx年x月x…
-
过程控制专业实习报告
齐齐齐齐齐齐齐齐哈哈哈哈尔尔尔尔大大大大学学学学机机机机电电电电工程学院过程装备与控制工程专业工程学院过程装备与控制工程专业工程学…
-
过程控制实训报告总结
重庆科技学院学生实习(实训)总结报告院(系):电气与信息工程学院专业班级:测控普-07学生姓名:***学号:****实习(实训)地…
-
过程控制系统实习报告
目录1单容水箱设备组成及其工艺111单容水箱设备的组成112单容水箱设备的工作原理12单容水箱控制系统的硬件设计221电气原理图的…
-
过程控制工程实习报告
过程控制工程实习报告指导老师:实习时间:小组成员:院系:班级:姓名:学号:年月日一、实习目的、意义过程控制工程实习的目的是培养我们…
-
过程控制实验报告
过程控制实验姓名高鹏班级09自动化学号0953505028I实验项目实验一单容水箱对象特性的了解和测试实验二单回路控制系统的参数整…