工位机械手实训报告

机电一体化综合实训报告
2012/2013学年第一学期
班 级:
姓 名:
学 号: 1030320427 1030320410
1030320411 1030320425
1030320409 1030320418
1030320401
指导教师:
20##年 12月 14日
荣成学院机电一体化综合实训任务书
摘 要
近年来,随着科学技术的进步和微电子技术的迅速发展,可编程序控制技术已广泛应用于自动化控制领域,可编程序控制器(PLC)以其高可靠性和操作简便等特点,已经形成了一种工业趋势。
可编程控制器是一种新型的通用控制装置,它将传统的继电器-接触器控制技术、计算机技术和通讯技术融为一体,专门为工业控制而设计,这一新型的通用自动控制装置以其高可靠性、较强的工作环境适应性和极为方便的使用性能,深受自动化领域技术人员的普遍欢迎。
关键词:可编程控制器(PLC);自动控制;工位机械手;
目录
荣成学院学院机电一体化综合实训任务书........................................................................ I
摘要...................................................................................................................................... II
第1章 工位机械手设计..................................................................................................... 1
1.1 实训题目................................................................................................................ 1
1.2 实训目的................................................................................................................ 1
1.3 实训任务................................................................................................................ 1
第2章 机电综合实训的方案............................................................................................. 2
2.1 工位机械手的结构及动作.................................................................................... 2
2.2 控制工艺要求........................................................................................................ 2
2.3 控制系统................................................................................................................ 2
2.4 选择PLC................................................................................................................ 3
第3章 硬件设计................................................................................................................. 5
3.1 机械手传送工件系统............................................................................................ 5
3.2 I/O接口分配........................................................................................................ 5
3.3 PLC的外部接线图.............................................................................................. 6
3.4 实物搭建及连线图................................................................................................ 6
3.5 控制系统流程图.................................................................................................... 7
3.6 控制系统梯形图.................................................................................................... 7
第4章 软件设计................................................................................................................. 9
4.1 程序调试................................................................................................................ 9
4.2 实验结果................................................................................................................ 9
第5章 实习心得体会....................................................................................................... 10
参考文献.............................................................................................................................. 11
致谢..................................................................................................................................... 12
附录..................................................................................................................................... 12
第1章 工位机械手设计
1.1实训题目
基于PLC的工位机械手控制装置设计。
1.2实训目的
目的:机电一体化综合训练是一个阶段性的综合训练环节,大学三年级上学期开设。通过综合训练,首先让学生了解一般机电控制系统的组成和控制方法,建立机电一体化系统控制的概念;其次通过学生综合运用所学机电专业相关理论知识,根据机电一体化系统上的机械结构及控制部分的工作原理,自己动手设计各个机械部件的动作控制流程,最后在典型机电一体化系统仿真试验台上进行仿真实验,锻炼学生的理论联系实际能力及综合应用知识的能力。
1.3实训任务
任务:包括机电一体化系统电气控制系统搭建及PLC应用训练、设计PLC程序机电系统的过程控制、在仿真试验台上运行程序并进行仿真实验。任务分配如表1-1。
表1-1 任务分配表
第2章 实训主要内容
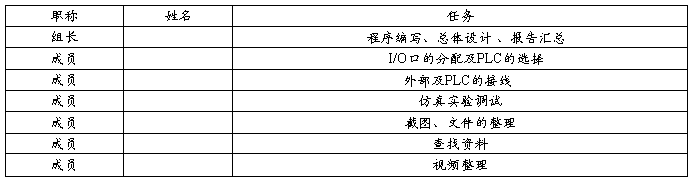
2.1工位机械手的结构及动作
本机械手为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。其动作过程如图2-1。
 原位 下降 夹紧 上升 右移
原位 下降 夹紧 上升 右移



 左移 上移 放松 下降
左移 上移 放松 下降
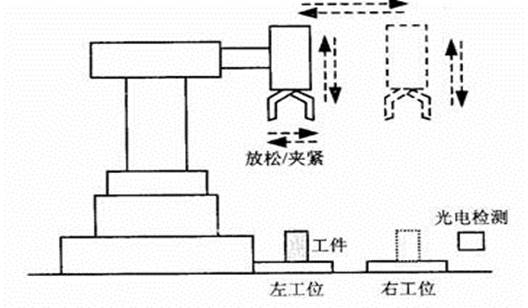
图2-1 机械手的结构及动作
2.2 控制工艺要求
机械手从原点开始,按一下启动按钮,机械手自动完成一个周期的动作后,自动进行下一个周期的动作。在工作中若按一下停止按钮,则机械手动作停止。重新启动时,须用手动操作将机械手移回到原点,然后按一下启动按钮,机械手重新开始周期操作。
2.3 控制系统
机械手控制系统如图2-2所示:
图2-2 机械手控制系统
2.4 选择PLC
可编程控制器(简称PLC):是一种数字运算操作的电子系统,专为在工业环境应用而设计的。它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
可编程序控制器实施控制,其实质就是按一定算法进行输入输出变换,并将这个变换与以物理实现。输入输出变换、物理实现可以说是PLC实施控制的两个基本点,同时物理实现也是PLC与普通微机相区别之处,其需要考虑实际控制的需要,应能排除干扰信号适应于工业现场,输出应放大到工业控制的水平,能为实际控制系统方便使用,所以PLC采用了典型的计算机结构,主要是由微处理器(CPU)、存储器(RAM/ROM)、输入输出接口(I/O)电路、通信接口及电源组成。PLC的基本结构和S7-200系列plc输入输出特性如图2-3、2-4所示。

图2-3 PLC的基本结构
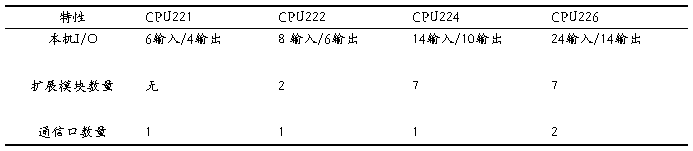
图2-4 S7-200系列plc输入输出特性
考虑经济性时,应同时考虑应用的可扩展性、可操作性、投入产出比等因素,进行比较和兼顾,最终选出较满意的产品。输入输出点数对价格有直接影响。每增加一块输入输出卡件就需增加一定的费用。当点数增加到某一数值后,相应的存储器容量、机架、母板等也要相应增加,估因此,点数的增加对CPU选用、存储器容量、控制功能范围等选择都有影响,在算和选用时应充分考虑,使整个控制系统有较合理的性能价格比。
本设计选取CPU224,它有14输入/10输出,I/O共计24点。和CPu222相比,存储容量扩大一倍,并且有7个扩展模块,有内置时钟,有更强的模拟量和高速计数以及处理能力,是应用最多的s7-200产品。
第3章 硬件设计
3.1 机械手传送工件系统
机械手的动作过程分解图如图3-1所示。从原点开始按下起动按钮时,机械手下降。下降到底时,碰到下限开关,机械手下降停止,机械手夹紧,碰到加紧限位开关后,机械手上升。上升到顶时,碰到上限开关,机械手上升停止,机械手右移,右移到位时,碰到右限开关,机械手右移停止。若此时工作台上无工件,则光电开关接通,机械手下降。下降到底时,碰到下限开关,机械手下降停止,机械手放松。放松后,到放松限位后,机械手上升。上升到顶时,碰到上限位开关,上升停止,机械手左移。左移到原点时,碰到左限位开关,左移停止。至此,机械手经过8步动作完成了一个周期。
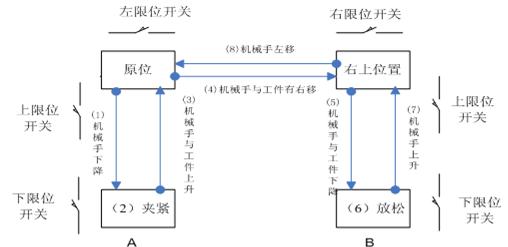
图3-1 机械手的动作过程分解图
3.2 I/O接口分配
从控制方式选择上需要2个按钮,分别完成启动 I0.0和停止I0.7。限位开关有6个,上升限位开关I0.1、下降限位开关I0.2、左移限位开关I0.3、右移限位开关I0.4、放松限位开关I0.5、夹紧限位开关I0.6,共八个输入信号。
输出信号有下降驱动Q0.0、夹紧驱动Q0.1、上升驱动Q0.2、右移驱动Q0.3、左移驱动Q0.4、松开驱动Q0.5,六个输出点 。如表3-1、表3-2。
表3-1 输入信号分配表

表3-2 输入信号分配表

3.3 PLC的外部接线图
1、一个刀开关,两个按钮开关
2、电源
3、六个行程开关
4、六个输出动作
PLC的外部接线图如图3-2所示。
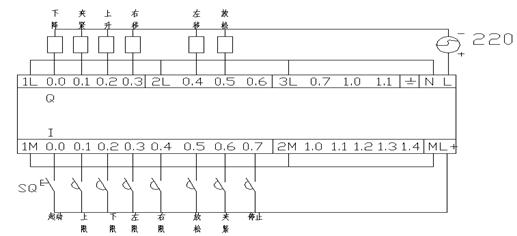
图3-2 PLC的外部接线图
3.4 实物搭建及连线图
系统实物搭建及连线图如图3-3所示。
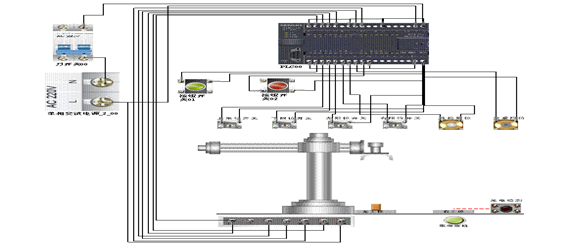
图3-3 系统实物搭建及连线图
3.5 控制系统流程图
流程图是编写程序的关键一步,能准确地反映出编程思路。控制系统流程图如图3-4所示。

图3-4 控制系统流程图
3.6 控制系统梯形图
梯形图是PLC使用得最多的图形编程语言,被称为PLC的第一编程语言,本工位机械手的系统梯形图如图3-5所示。
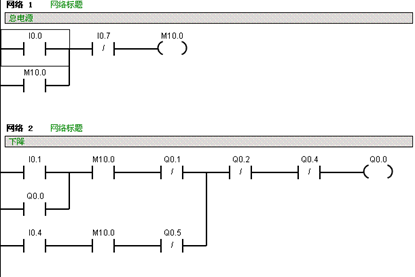
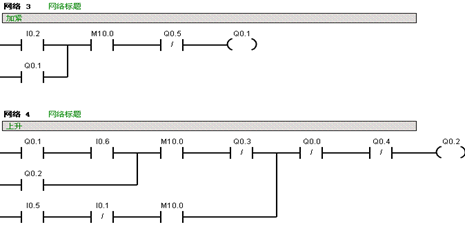
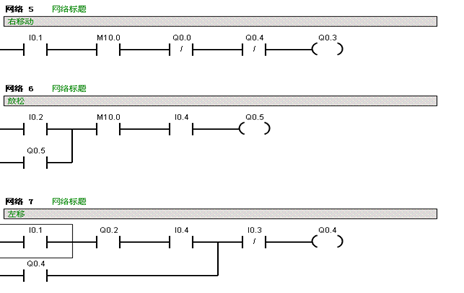
图3-5 控制系统梯形图
第四章 程序调试及运动仿真
4.1程序调试
1) 按照PLC图的I/O端对应的外部接线图连接硬件电路,检查无误后实验装置上电。
2) 打开SIEMENS S7-200PLCz编程软件,键入所编程序。经编译检查无误后,把编写好的程序下载到西门子S7-200的PLC中进行调试。
3)程序调试:打开总电源,闭合启动按钮I0.0,有输出点Q0.0变亮;断开启动按钮I0.0,闭合下降限位开关I0.2,有Q0.1输出变亮;闭合夹紧限位开关I0.6,有Q0.2输出变亮;闭合上升限位开关I0.1,有Q0.3输出变亮 ;闭合右移限位开关I0.4,有Q0.0输出变亮;闭合下降限位开关I0.2,有Q0.5输出变亮;闭合松开限位开关I0.5,有Q0.2输出变亮 ;再次闭合上升限位I0.1,有Q0.4输出变亮;当机械手回到原位时,左限位开关I0.3闭合,重复整个动作;整个过程中,当按下停止按钮I0.7时,机械手停止。
4)仿真分析:连接接线图,六个限位开关要接常开还是常闭需要经过分析和不断的调试分析。
4.2实验结果分析
以上程序经模拟调试和现场运行均达到了理想的效果,小车能够按照控制要求运行,实现了PLC对小车的控制要求。
第5章 实训心得体会
通过这次机电综合实训使我们收获颇多,让我们更加深刻了解机与电的结合,把日常所学的知识应用于这次实训中 ,更加拉近了理论和实际的距离,这次是很好的复习以前所学知识的机会,这次让我感受最深的能够把PLC真正的应用于工程实际中,更加了解PLC的强大功能及它带给我们的便利。让我更加熟知PLC程序的编制、调试、应用。
此次机电综合实训在宋鸣老师的指导下,我们收获颇多。在系统设计过程中,我们遇到了很多设计方面的问题。为了弄懂相关的知识,掌握相关技术,我们翻阅了大量的书籍和资料,并积极利用互联网丰富的资源找取答案。让我们对PLC梯形图、指令表、外部接线图有了更好的了解,也让我们了解了关于PLC设计原理。另外,我们还在宇龙仿真软件进行仿真模拟过程。
各组成员彼此还是脱离不了集体的力量,遇到问题和同学互相讨论交流。多和同学讨论。我们在做机电综合实训的过程中要不停的讨论问题,这样,我们可以尽可能的统一思想,这样就不会使自己在做的过程中没有方向,并且这样也是为了方便最后设计和在一起。讨论不仅是一些思想的问题,还可以深入的讨论一些技术上的问题,这样可以使自己的处理问题要快一些,少走弯路。多改变自己设计的方法,在设计的过程中最好要不停的改善自己解决问题的方法,这样可以方便自己解决问题。
我们的学习不但要立足于书本,以解决理论和实际教学中的实际问题为目的,还要以实践相结合,理论问题即实践课题,解决问题即课程研究,学生自己就是一个专家,通过自己的手来解决问题比用脑子解决问题更加深刻。学习就应该采取理论与实践结合的方式,理论的问题,也就是实践性的课题。这种做法既有助于完成理论知识的巩固,又有助于带动实践,解决实际问题,加强我们的动手能力和解决问题的能力。
在这次机电一体化综合实训之后我们更加了解所学专业,深知我们还有许多不足的地方需要改进和进步,以后会更加努力学习专业知识 ,增强专业技能能力。
参考文献
[1]《电器控制与PLC应用技术》 机械工业出版社 田效伍 主编
[2]《机电一体化控制技术》 高等教育出版社 陈瑞阳 主编
[3]《机械设备控制技术》 机械工业出版社 陈鼎宁 主编
[4]《电气控制技术[J]》 机械工业出版社 齐占庆 主编
[5]《电气控制与PLC应用[M]》 机械工业出版社 余雷声 主编
[6]《机电控制工程(第二版)[M]》 清华大学出版社 高钟毓 主编
[7]《现代电气控制及PLC应用技术[M]》 北京航空航天大学出版社
[8]《PLC应用开发技术与工程实践[M]》 人民邮电出版社
致 谢
首先衷心地感谢宋鸣老师。本文从选题到完成,从理论上的探讨到实际问题的解决,无处不饱含着老师的心血。老师的悉心指导和建议给了我极大的帮助和支持,使我受益匪浅,在此论文完成之际,谨向老师致以深深的谢意和崇高的敬意!
附 录
工位机械手仿真视频
-
工位机械手实训报告
哈尔滨理工大学机电一体化综合实训说明书机电一体化综合实训报告20xx20xx学年第一学期班级姓名学号指导教师20xx年12月14日…
-
机械手实习报告
毕业实习报告书系部专业班级学生姓名完成日期山东科技大学泰安校区山东科技大学泰安校区实习报告书实习报告一实习目的实习是理论与实际的体…
-
机械手实训报告
机械工程与电气自动化学院课程设计20xx20xx学年第一学期课程名称PLC实训题目机械手实训装置专业班级电气自动化2班学生姓名卢福…
-
机械手的控制实训报告
实训报告PLC对机械手的控制班级计控0802姓名李灵慧学号1514080216一课题的意义机械手的控制对于很多场合需求很大不论是机…
-
机械手实验报告
信息系统工程硬件基础综合实验报告机械手群控系统设计20xx年8月1日第一章信息系统工程硬件基础综合实验的目的意义311实验目的31…
-
机械类实习报告
毕业综合训练(实习形式用)课题名称:哈尔滨铁路局工业总公司内燃机械厂学院:机械工程专业:机械制造及自动化班级:机制专(1)班姓名:…
-
工程机械发动机拆装实训报告
一、实习目的与要求实习目的:⒈巩固和加强工程机械构造和原理课程的理论知识,为后续课程的学习奠定必要的基础。⒉使学生掌握工程机械总成…
-
长春理工大学机械专业实习报告
实习报告姓名:_____***______学号:____********____学院(系):__机电工程学院__专业:机械班级:_…
-
机械制图实训报告
姓名:李向东学号:1930101071班级:09机电(2)班专业:机电一体化一、了解机械制图的地位和任务机械制图是机械类设计人员必…
-
机械厂社会实践报告
实习目的将所学的理论知识与实践结合起来,培养勇于探索的创新精神、提高动手能力,加强社会活动能力,严肃认真的学习态度,为以后专业实习…
-
机械专业实习总结123
机械专业实习总结班级:学号:姓名:班号:5月14号始了我们为期两周的工厂实习,在陈宏斌老师的带领下,我们见习了长江动力机械厂,岳阳…