20xx电子设计大赛四旋翼测评标准




第二篇:20xx电子设计大赛四旋翼自主飞行器_(B1_题)
20xx年全国大学生电子设计竞赛
课题:四旋翼自主飞行器 (B 题)
【本科组】
20xx年9月7日

摘 要
为了满足四旋翼飞行器的设计要求,设计了以微控制器为核心的控制系统和算法。首先进行了各单元电路方案的比较论证,确定了硬件设计方案。四旋翼飞行器采用了固连在刚性十字架交叉结构上的4个电机驱动的一种飞行器,以78K0R CPU內核为基础,围绕新的RL78 CPU內核演化而来的RL78/G13作为控制核心,工作频率高达32MHz,工作电压1.6V-5.5V,适合各种类型的消费类电子和工业应用, 满足8/16位微控制器的需求,有助于降低系统功耗,削减总系统的构建成本。采用9926B MOS管芯片的驱动直流电机,该驱动芯片具有内阻小、负载电流大、且控制简单的特性。通过采用MPU-6050整合的3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,实现了四旋翼飞行器运动速度和转向的精准控制。通过HC-SR04超声波测距模块实现了对四旋翼飞行器飞行高度的准确控制。通过激光传感器,实现了四旋翼飞行器沿黑线前进,在规定区域起降,投放铁片等功能,所采用的设计方案先进有效,完全达到了设计要求。
关键词:四旋翼自主飞行器,激光,寻线,超声波,单片机
2
目 录
1系统方案........................................................................................................................................ 1
1.1 XXXX的论证与选择 ........................................................................................................ 1
1.2 XXXX的论证与选择 ........................................................................................................ 1
1.3 控制系统的论证与选择 .................................................................................................... 1
2系统理论分析与计算 .................................................................................................................... 1
2.1 XXXX的分析 ................................................................................................................. 3
2.1.1 XXX ......................................................................................................................... 3
2.1.2 XXX ......................................................................................................................... 3
2.1.3 XXX ......................................................................................................................... 3
2.2 XXXX的计算 .................................................................................................................... 3
2.2.1 XXX ......................................................................................................................... 3
2.2.2 XXX ......................................................................................................................... 3
2.2.3 XXX ......................................................................................................................... 3
2.3 XXXX的计算 .................................................................................................................... 3
2.3.1 XXX ......................................................................................................................... 4
2.3.2 XXX ......................................................................................................................... 4
2.3.3 XXX ......................................................................................................................... 4
3电路与程序设计 ............................................................................................................................ 4
3.1电路的设计 ......................................................................................................................... 4
3.1.1系统总体框图 .......................................................................................................... 4
3.1.2 XXXX子系统框图与电路原理图 ......................................................................... 5
3.1.3 XXXX子系统框图与电路原理图 ......................................................................... 5
3.1.4电源 ........................................................................................ 错误!未定义书签。
3.2程序的设计 ......................................................................................................................... 5
3.2.1程序功能描述与设计思路 ...................................................................................... 5
3.2.2程序流程图 .............................................................................................................. 5
4测试方案与测试结果 .................................................................................................................... 6
4.1测试方案 ............................................................................................................................. 6
4.2 测试条件与仪器 ................................................................................................................ 6
4.3 测试结果及分析 ................................................................................................................ 6
4.3.1测试结果(数据) ....................................................................................................... 6
4.3.2测试分析与结论 ...................................................................................................... 7 附录1:电路原理图 ...................................................................................... 错误!未定义书签。 附录2:源程序 .............................................................................................. 错误!未定义书签。
III
四旋翼自主飞行器 (B 题)
【本科组】
1系统方案
本系统主要由电源模块、电机驱动模块、光电循迹模块模块、超声波测高模块、 姿态传感器模块组成,下面分别论证这几个模块的选择。
1.1 电源模块的论证与选择
方案一:采用线性元器件LM7805三端稳压器构成稳压电路,为单片机等其他模块供电,输出纹波小,效率低,容易发热。
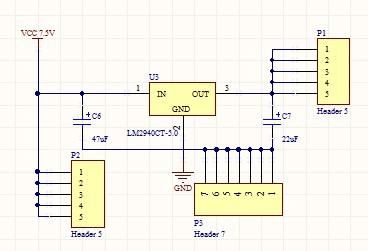
方案二:采用元器件2596为开关稳压芯片,效率高,输出的纹波大,不容易发热。 方案三:采用线性元器件2940构成稳压电路,为单片机等其他模块供电,输出纹波小,效率高,不容易发热,综合性能高。
综合以上三种方案,选择方案三。
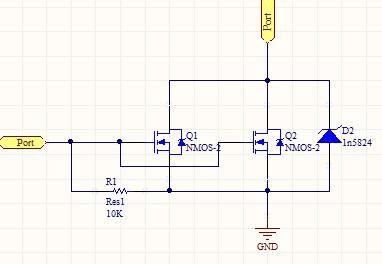
1.2 电机驱动模块的论证与选择
方案一:采用三极管驱动,由于输出电流很大,容易发热,
方案二:采用L298N电机驱动模块,通过电流大,容易发热,使得电机转速变慢,载重量变小。
方案三:采用场效应管9926B芯片组成的电机驱动模块,驱动能力好。能承受的最大电流为7.5A,符合要求。
综合以上三种方案,选择方案三。
1.3 光电循迹模块模块的论证与选择
方案一:采用CCD摄像头采集图片经过算法处理循迹,前瞻性比较好、循迹效果好,但是处理程序复杂、成本高。
方案二:采用红外对管,有效距离太短,不能满足实际循迹要求。
方案三:采用激光,前瞻性较好、抗干扰性较好。
综合以上三种方案,选择方案三。
1.4 超声波测高模块的论证与选择
采用E18-D50NK光电式传感器,这是一种集发射与接收于一体的光电传感器。检测距离可以根据要求进行调节。该传感器具有探测距离远、受可见光干扰小。
1.5 姿态传感器模块的论证
(1) 概述
四轴飞行器属于多旋翼飞行器,各个桨翼之间的旋转过程中总存在着相互干扰,这 就导致在飞行过程中,飞行的稳定性较差;另外在飞行器的电机、桨叶及机身等方面要 1
求也较高,它要求各个旋翼的电机特性一致、各个桨叶的桨距及安装角度相同、机身对 称等等。然而实际中这些条件很难满足,而且往往相差较大;因此飞行器稳定性差,且 难以控制,在设计控制系统时着重需要考虑飞行器的稳定性设计。
这样姿态测量在飞行器系统中就显得尤为必要,设计相应的传感器对飞行器的运动 姿态进行测量,有助于反馈当前姿态,确保飞行稳定。
(2) 传感器使用
设计中选用加速度和角速度两种传感器来进行姿态测量,用加速度的测量数据来互 补角速度传感器测量的不足;设计中采用 InvenSense 公司生产的整合性 6 轴运动处理组件 MPU-6050;MPU-6050 为全球首例整合性组件,相比较多组件方案,有如下特点:
(a) 免除了组合陀螺仪与加速计时存在的轴差问题,减少了大量的包装空间。
(b) MPU-6050 整合了 3 轴角速度和 2 轴加速度传感器,并含可用第二个 IIC 端口连接其他厂牌的磁力传感器或其他传感器的数位运动处理(DMP)硬件加速引擎,由 主 IIC 接口以单一数据流的形式向应用提供输出完整的 9 轴融合演算技术。
MPU-6050 被广泛应用于运动感测游戏、光学稳像、行人导航器等设计研究中,且 具备可观的市场前景,其器件特征如下:
(a) 内部 3 轴角速度传感器具有±250、±500、±1000 与±2000(°/s)全格测量范围;3 轴加速度量程可程序控制,控制范围为±2g、±4g、±8g 和±16g。
(b) 具备较低功耗:芯片供电电压 VDD 为 2.5V±5%、3.0V±5%、3.3V±5%;陀螺仪工作电流 5mA,待机电流仅 5uA;加速计工作电流 500uA,在 10Hz 低功耗模 式下仅 40uA。
(c) 陀螺仪和加速计都具备 16 位 ADC 同步采样;另外陀螺仪具备增强偏置和温度稳定的功能,减少了用户校正操作,且具备改进的低频噪声性能;加速计则具备 可编程中断和自由降落中断的功能。
(d) 接口采用可高达 400kHz 的快速模式 IIC,内建频率发生器在所有温度范围仅有1%频率变化。
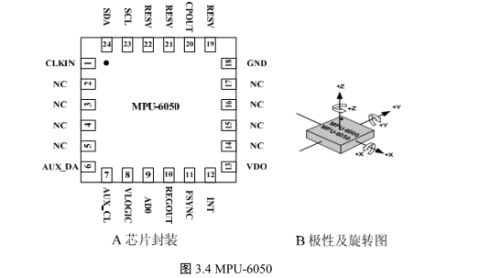
(e) 具备较小的 4mm*4mm 的 QFN 封装,减少占据面积;其 QFN 封装如图 3.4-A 所示,图 3.4-B 为其 3 个轴的极性及旋转图。
2
(3). 传感器电路
在实际设计中,微处理器通过 IIC 接口读取传感器模块的数据,MPU-6050 模块电路设计如图 3.5 所示:
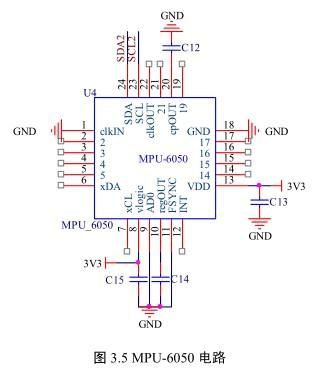
图 3.5 MPU-6050 电路
图 3.5 中,IIC 总线 SDA、SCL 连接微处理器的 I/O,相应的电源与地之间需要设计 去耦电容以确保芯片供电稳定;设计中只使用主 IIC 接口,其他的功能引脚设置悬空。
2系统理论分析与计算
2.1 XXXX的分析
2.1.1 XXX
XXXX
2.1.2 XXX
XXXX
2.1.3 XXX
XXXX
2.2 XXXX的计算
2.2.1 XXX
XXXX
2.2.2 XXX
XXXX
2.2.3 XXX
XXXX
3
2.3 XXXX的计算
2.3.1 XXX
XXXX
2.3.2 XXX
XXXX
2.3.3 XXX
XXXX
3电路与程序设计
3.1电路的设计
3.1.1系统总体框图
系统总体框图如图3.1.1所示:
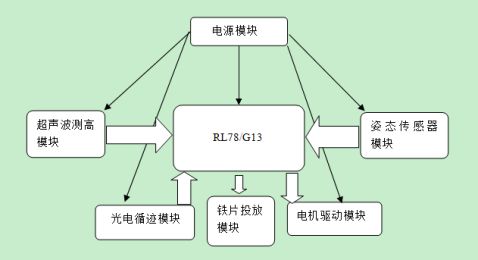
图3.1.1 系统总体框图
4
3.1.2 电源模块电路原理图
3.1.3 电机驱动电路原理图
3.2程序的设计
3.2.1程序功能描述与设计思路
系统软件采用C语言开发,在CubSuite+环境下调试并实现功能。程序流程如图3.2.2所示,进入主程序并初始化后,按键开关按下后开始执行相应的程序。软件程序设计采用模块化的结构,便于分析和实现功能。
2、程序设计思路
3.2.2程序流程图
1、主程序流程图
2、XXX子程序流程图
5
3、XXX子程序流程图
4、XXX子程序流程图
4测试方案与测试结果
4.1测试方案
1、硬件测试
2、软件仿真测试
3、硬件软件联调
4.2 测试条件与仪器
测试条件:检查多次,运行程序无误,仿真电路和硬件电路必须与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊。
测试仪器:CubSuite+,示波器,数字万用表。
4.3 测试结果及分析
4.3.1测试结果(数据)

6
4.3.2测试分析与结论
根据上述测试数据,XXXXXXXXXXXXXXXXXXXXXXXXXXXXX,由此可以得出以下结论:
1、
2、
3、
综上所述,本设计达到设计要求。
附录1:电路原理图
附录2:源程序
7

-
湖北理工学院20xx年全国大学生电子设计大赛总结(X)
湖北理工学院20xx年全国大学生电子设计大赛总结——发挥学生社团作用,依托学科竞赛深化实践教学改革???..在20xx年全国大学生…
-
电子设计大赛心得
在短暂的大学时光中,总有难忘的青春与记忆。画面定格在20xx年的最后一个暑假,32天紧张有序的准备与磨砺,4天3夜的汗水与拼搏。经…
-
电子设计大赛总结报告
电子设计大赛总结报告学号姓名李永飞第1页共15页20xx130101221摘要11目的设计并制作一个家用电热水器控制系统容量2升左…
-
全国大学生电子设计竞赛总结
电子设计竞赛总结电子设计竞赛过去一个月了,应学校要求同时也是想对这次比赛做一个自我总结,故作此文。先回顾一下这整个过程吧,确切的讲…
-
电子设计大赛感悟
20xx年山东省电子设计竞赛大学生创新创业基地个人总结20xx年9月电赛感想时间过的真快电赛结束已一周翻动回忆一切仿佛依旧在昨天回…
-
20xx年全国大学生电子设计竞赛撰写论文心得体会
20xx年全国大学生电子设计竞赛撰写论文心得体会20xx年x月,我有幸参加了大学里唯一的一次电赛。经过四天四夜的比赛之后,感触颇多…
-
全国大学生电子设计竞赛总结
电子设计竞赛总结电子设计竞赛过去一个月了,应学校要求同时也是想对这次比赛做一个自我总结,故作此文。先回顾一下这整个过程吧,确切的讲…
-
电子设计大赛心得
在短暂的大学时光中,总有难忘的青春与记忆。画面定格在20xx年的最后一个暑假,32天紧张有序的准备与磨砺,4天3夜的汗水与拼搏。经…
-
湖北理工学院20xx年全国大学生电子设计大赛总结(X)
湖北理工学院20xx年全国大学生电子设计大赛总结——发挥学生社团作用,依托学科竞赛深化实践教学改革???..在20xx年全国大学生…
-
全国大学生电子设计竞赛报告要求及格式
全国大学生电子设计竞赛设计报告要求及格式设计报告内容一封面单独1页见样件二摘要中文200300字单独1页三设计报告正文1前言简述本…