单片机课程设计实验报告
中国民航大学
单片机课程设计报告
数字温度计
姓 名: 白杨
学 号: 111141101
专业班级:自动化A
指导老师:常美华/赵淑舫
所在学院:航空自动化学院
20##年 12月 18日
1 概述
1.1 课程设计的意义
本次课程设计是在我们学过单片机后的一次实习,可增加我们的动手能力。特别是对单片机的系统设计有很大帮助。
1.2 设计的任务和要求
1、基本范围-55℃-125℃
2、精度0.1℃
3、LED数码直读显示
4、LCD数码直读显示(扩展)
2系统总体方案及硬件设计
2.1数字温度计设计方案论证
2.1.1方案一
由于本设计是测温电路,可以使用热敏电阻之类的器件利用其感温效应,在将随被测温度变化的电压或电流采集过来,进行A/D转换后,就可以用单片机进行数据的处理,在显示电路上,就可以将被测温度显示出来,这种设计需要用到A/D转换电路,其中还涉及到电阻与温度的对应值的计算,感温电路比较麻烦。而且在对采集的信号进行放大时容易受温度的影响出现较大的偏差。
2.1.2 方案二
进而考虑到用温度传感器,在单片机电路设计中,大多都是使用传感器,所以这是非常容易想到的,所以可以采用一只温度传感器DS18B20,此传感器,可以很容易直接读取被测温度值,进行转换,电路简单,精度高,软硬件都以实现,而且使用单片机的接口便于系统的再扩展,满足设计要求。
从以上两种方案,很容易看出,采用方案二,电路比较简单,费用较低,可靠性高,软件设计也比较简单,故采用了方案二。
2.2系统总体设计
温度计电路设计总体设计方框图如图1所示,控制器采用单片机AT89C51,温度传感器采用DS18B20,用4位LED数码管及液晶以串口传送数据实现温度显示。
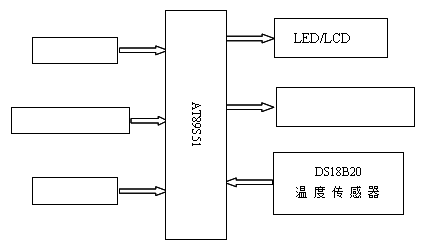
图2.2—1 总体设计方框图
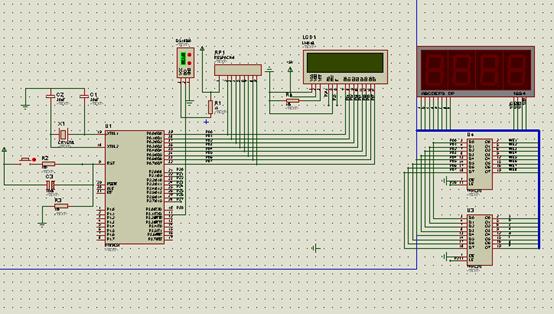
2.2—2系统仿真图
2.3系统模块
系统由单片机最小系统、显示电路、温度传感器等组成。
2.3.1 主控制器
单片机AT89C51具有低电压供电和体积小等特点,四个端口只需要两个口就能满足电路系统的设计需要,很适合便携手持式产品的设计使用系统可用二节电池供电。
晶振采用12MHZ。
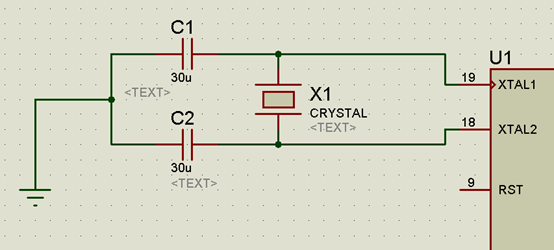
图2.3.1晶振电路
2.3.2 显示电路
显示电路采用4位共阴极LED数码管及LCD1602,P0口由上拉电阻提高驱动能力,作为段码输出并作为数码管的驱动。P0口的低四位作为数码管的位选端(两片锁存器)。采用动态扫描的方式显示
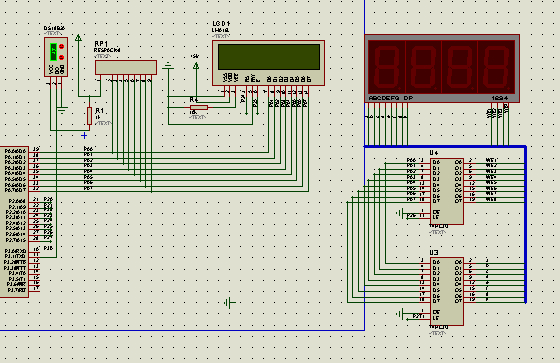
图2.3.2 数码管液晶显示电路
2.3.3温度传感器
DS18B20温度传感器是美国DALLAS半导体公司最新推出的一种改进型智能温度传感器,与传统的热敏电阻等测温元件相比,它能直接读出被测温度,并且可根据实际要求通过简单的编程实现9~12位的数字值读数方式。DS18B20的性能特点如下:
1、独特的单线接口仅需要一个端口引脚进行通信;
2、多个DS18B20可以并联在惟一的三线上,实现多点组网功能
3、无须外部器件;
4、可通过数据线供电,电压范围为3.0~5.5V;
5、零待机功耗;
6、温度以9或12位数字;
7、用户可定义报警设置;
8、报警搜索命令识别并标志超过程序限定温度(温度报警条件)的器件;
9、负电压特性,电源极性接反时,温度计不会因发热而烧毁,但不能正常工作;
DS18B02可以采用两种方式供电,一种是采用电源供电方式,此时DS18B20的1脚接地,2脚作为信号线,3脚接电源。另一种是寄生电源供电方式,如图4 所示单片机端口接单线总线,为保证在有效的DS18B20时钟周期内提供足够的电流,可用一个MOSFET管来完成对总线的上拉。
当DS18B20处于写存储器操作和温度A/D转换操作时,总线上必须有强的上拉,上拉开启时间最大为10us。采用寄生电源供电方式时VDD端接地。由于单线制只有一根线,因此发送接口必须是三态的。
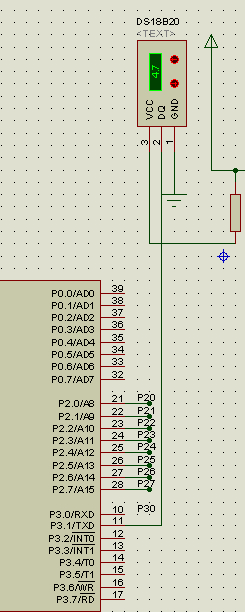
图2.3.3 温度传感器与单片机的连接
3系统软件算法分析
系统程序主要包括主程序,读出温度子程序,温度转换命令子程序,计算温度子程序,显示数据刷新子程序,按键扫描处理子程序等。
3.1主程序流程图
主程序的主要功能是负责温度的实时显示、读出并处理DS18B20的测量的当前温度值,温度测量每1s进行一次。这样可以在一秒之内测量一次被测温度,其程序流程见图3.1所示。


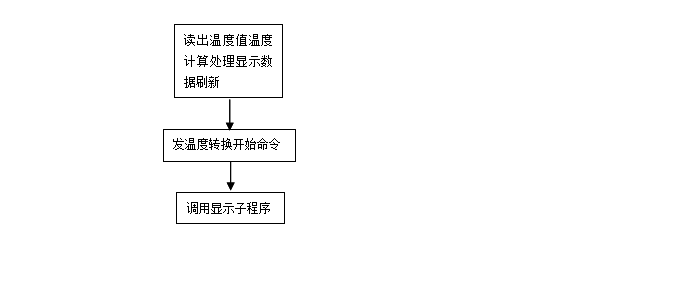

图3.1 主程序流程图
3.2读出温度子程序
读出温度子程序的主要功能是读出RAM中的9字节,在读出时需进行CRC校验,校验有错时不进行温度数据的改写。其程序流程图如图3.2示
3.3温度转换命令子程序
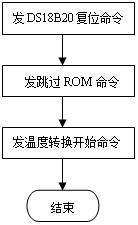 温度转换命令子程序主要是发温度转换开始命令,当采用12位分辨率时转换时间约为750ms,在本程序设计中采用1s显示程序延时法等待转换的完成。温度转换命令子程序流程图如上图,图3.3所示
温度转换命令子程序主要是发温度转换开始命令,当采用12位分辨率时转换时间约为750ms,在本程序设计中采用1s显示程序延时法等待转换的完成。温度转换命令子程序流程图如上图,图3.3所示
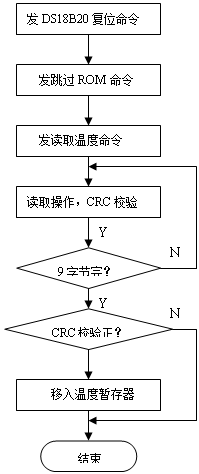
图3.3 温度转换流程图
图3.2 读温度流程图
3.4 计算温度子程序
计算温度子程序将RAM中读取值进行BCD码的转换运算,并进行温度值正负的判定,其程序流程图如图3.4所示。
3.5 显示数据刷新子程序
显示数据刷新子程序主要是对分离后的温度显示数据进行刷新操作,当标志位位为1时将符号显示位移入第一位。程序流程图如图3.5。
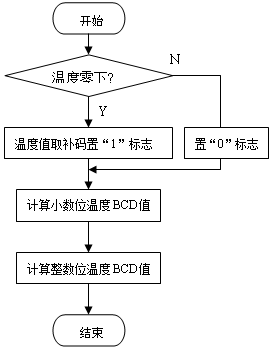
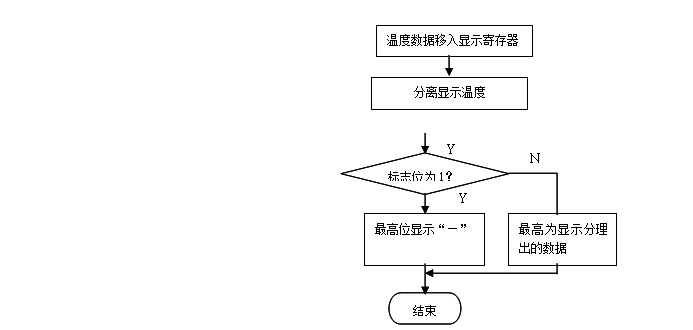
图3.4 计算温度流程图 图3.5 显示数据刷新流程图
4 实验仿真
进入protuse后,连接好电路,并将程序下载进去。将DS18B20的改为0.1,数码管及LCD液晶显示温度与传感器的温度相同。
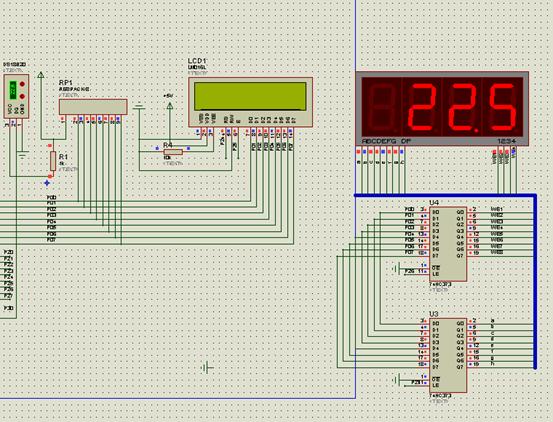
图4—1 数码温度显示仿真
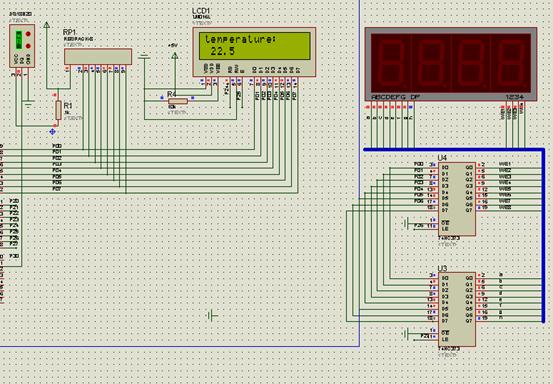
图4—2 液晶温度显示仿真
5 总结与体会
通过这次对数字温度计的设计与制作,让我了解了设计电路的程序,也让我了解了关于数字温度计的原理与设计理念,要设计一个电路总要先用仿真仿真成功之后才实际接线的。但是最后的成品却不一定与仿真时完全一样,因为,再实际接线中有着各种各样的条件制约着。而且,在仿真中无法成功的电路接法,在实际中因为芯片本身的特性而能够成功。所以,在设计时应考虑两者的差异,从中找出最适合的设计方法。
通过这次学习,让我对各种电路都有了大概的了解,所以说,坐而言不如立而行,对于这些电路还是应该自己动手实际操作才会有深刻理解。
在调试过程中我曾将温度传感器的电源、地接反啦,导致温度传感器急剧发热,后经观察和查询资料才得以改正。
从这次的课程设计中,我真真正正的意识到,在以后的学习中,要理论联系实际,把我们所学的理论知识用到实际当中,学习单机片机更是如此,程序只有在经常的写与读的过程中才能提高,这就是我在这次课程设计中的最大收获。
查考文献
【1】李朝清 单片机的C语言应用程序设计(第三版) 北京航空航天大学出版社
【2】赵建岭 弓雷 51系列单片机开发宝典 电子工业出版社
【3】李平 杜涛 罗和平 单片机应用开发与实践 机械工业出版社
附 源程序代码
数码管程序
//DS18B20的读写程序,数据脚P3.1 //
//温度传感器18B20汇编程序,采用器件默认的12位转化 //
//最大转化时间750微秒,显示温度-55到+125度,显示精度 //
//为0.1度,显示采用4位LED共阴显示测温值 //
//P0口为位码、段码输入,P2.6为位选 ,P2.7为段选 //
/***************************************************/
#include<reg51.h>
#include<absacc.H>
#include <intrins.h>
#include<stdio.h>
#define uchar unsigned char
#define uint unsigned int
sbit ds=P3^1;//定义DS18B20数据线
sbit wela=P2^6;
sbit dula=P2^7;
bit list_flag=0;//初始化正确与否标志位
uchar flag;//正负号标志位
uchar aa,bb,cc;
uchar temp_value;
uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x40,0x63,0x39};
uchar code table1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};
void delay(uint ms) //延时程序
{
while(ms--);
}
uchar Init(void )//DS18B20初始化
{
uchar status;
ds=1;
delay(8);
ds=0;
delay(90);//延时
ds=1;
delay(8);//延时
status=ds; //如果为0,则初始化成功,如果为1,则初始化失败
delay(100);//延时
return(status);
}
uchar tempread(void)//从DS18B20读取一个字节数据
{
uchar i=0;
uchar dat=0;
for(i=8;i>0;i--)
{
ds=0;//给脉冲信号
dat>>=1;
ds=1;
_nop_();
_nop_();
if(ds) dat|=0x80;
delay(4);
ds=1;
}
return(dat);
}
void tempwritebyte(uchar dat)// 向DS18B20写一个字节数据
{
uchar j;
for(j=1;j<=8;j++)
{
ds=0;
ds=dat&0x01;
delay(5);
ds=1;
dat>>=1;
}
}
uchar get_temp(void)//DS18B20开始获取温度并转换
{
uchar a,b,t;
if(Init()==1)
{list_flag=1;}
else
{
list_flag=0;
Init();
tempwritebyte(0xcc);
tempwritebyte(0x44);
Init();
tempwritebyte(0xcc);
tempwritebyte(0xbe);
a=tempread();//读低8位
b=tempread();//读高8位
temp_value=(a&0x0f);//小数部分
if((b&0x80)==0x80)
{
b=~b;a=~a+1;
t=((b<<4)|(a>>4));
flag=0;
}
else
{
t=((b<<4)|(a>>4));
flag=1;
}
}
return (t);
}
void dis_temp()
{
aa=get_temp()/10;
bb=get_temp()%10;
cc=temp_value*625/1000%10;
if(flag==0)
{
wela=1;
P0=0xfe;
wela=0;
dula=1;
P0=0x40;//送-号
dula=0;
delay(10);
delay(10);
}
else if(flag==1)
{
wela=1;
P0=0xfe;
wela=0;
dula=1;
P0=0x00;
dula=0;
delay(10);
delay(10);
wela=1;
P0=0xf7;
wela=0;
dula=1;
P0=table[cc];
dula=0;
delay(300);
delay(300);
}
wela=1;
P0=0xfd;
wela=0;
dula=1;
P0=table[aa];
dula=0;
delay(300);
delay(300);
wela=1;
P0=0xfb;
wela=0;
dula=1;
P0=table1[bb];
dula=0;
delay(300);
delay(300);
wela=1;
P0=0xf7;
wela=0;
dula=1;
P0=table[cc];
dula=0;
delay(300);
delay(300);
}
void main(void)
{
while(1)
{
get_temp();
dis_temp();
}
}
液晶显示程序
#include<reg51.h>
#include<absacc.H>
#include <intrins.h>
#include<stdio.h>
#define uchar unsigned char
#define uint unsigned int
sbit ds=P3^1;//定义DS18B20数据线
sbit wela=P2^6;
sbit dula=P2^7;
sbit RS=P2^4;
sbit EN=P2^5;
bit list_flag=0;//初始化正确与否标志位
uchar flag;//正负号标志位
uchar aa,bb,cc;
uchar temp_value;
unsigned char code str1[]={"temperature: "};
unsigned char code str2[]={" "};
/*************************lcd1602程序**************************/
void delay1ms(unsigned int ms)//延时1毫秒(不够精确的)
{unsigned int i,j;
for(i=0;i<ms;i++)
for(j=0;j<100;j++);
}
void wr_com(unsigned char com)//写指令//
{ delay1ms(1);
wela=0x00;
dula=0x00;
RS=0;
EN=0;
P0=com;
delay1ms(1);
EN=1;
delay1ms(1);
EN=0;
}
void wr_dat(unsigned char dat)//写数据//
{ delay1ms(1);;
RS=1;
EN=0;
P0=dat;
delay1ms(1);
EN=1;
delay1ms(1);
EN=0;
}
void lcd_init()//初始化设置//
{delay1ms(15);
wr_com(0x38);delay1ms(5);
wr_com(0x08);delay1ms(5);
wr_com(0x01);delay1ms(5);
wr_com(0x06);delay1ms(5);
wr_com(0x0c);delay1ms(5);
}
void display(unsigned char *p)//显示//
{
while(*p!='\0')
{
wr_dat(*p);
p++;
delay1ms(1);
}
}
init_play()//初始化显示
{ lcd_init();
wr_com(0x80);
display(str1);
wr_com(0xc0);
display(str2);
}
void delay(uint ms) //延时程序
{
while(ms--);
}
uchar Init(void )//DS18B20初始化
{
uchar status;
ds=1;
delay(8);
ds=0;
delay(90);//延时
ds=1;
delay(8);//延时
status=ds; //如果为0,则初始化成功,如果为1,则初始化失败
delay(100);//延时
return(status);
}
uchar tempread(void)//从DS18B20读取一个字节数据
{
uchar i=0;
uchar dat=0;
for(i=8;i>0;i--)
{
ds=0;//给脉冲信号
dat>>=1;
ds=1;
_nop_();
_nop_();
if(ds) dat|=0x80;
delay(4);
ds=1;
}
return(dat);
}
void tempwritebyte(uchar dat)// 向DS18B20写一个字节数据
{
uchar j;
for(j=1;j<=8;j++)
{
ds=0;
ds=dat&0x01;
delay(5);
ds=1;
dat>>=1;
}
}
uchar get_temp(void)//DS18B20开始获取温度并转换
{
uchar a,b,t;
if(Init()==1)
{list_flag=1;}
else
{
list_flag=0;
Init();
tempwritebyte(0xcc);
tempwritebyte(0x44);
Init();
tempwritebyte(0xcc);
tempwritebyte(0xbe);
a=tempread();//读低8位
b=tempread();//读高8位
temp_value=(a&0x0f);//小数部分
if((b&0x80)==0x80)
{
b=~b;a=~a+1;
t=((b<<4)|(a>>4));
flag=0;
}
else
{
t=((b<<4)|(a>>4));
flag=1;
}
}
return (t);
}
void dis_temp()
{
aa=get_temp()/10+0X30;
bb=get_temp()%10+0X30;
cc=temp_value*625/1000%10+0X30;
if(flag==0)
{ wela=0;
dula=0;
wr_com(0xc0);
wr_dat(0x2d);//显示符号位
}
else if(flag==1)
{ wela=0x00;
dula=0x00;
wr_com(0xc0);
wr_dat(0x00);//显示符号位
}
wela=0x00;
dula=0x00;
wr_com(0xc1);
wr_dat(aa);//显示十位
delay1ms(50);
dula=0x00;
wela=0x00;
wr_com(0xc2);
wr_dat(bb);//显示个位
wela=0x00;
dula=0x00;
wr_com(0xc3);
wr_dat(0x2e);//显示小数点
wela=0x00;
dula=0x00;
wr_com(0xc4);
wr_dat(cc);//显示小数位
}
void main(void)
{
init_play();//初始化显示
while(1)
{
get_temp();
dis_temp();
}
}
-
单片机课程设计实验报告
中国民航大学单片机课程设计报告数字温度计姓名白杨学号专业班级指导老师常美华赵淑舫所在学院航空自动化学院20xx年12月18日1概述…
-
51单片机课程设计实验报告
51单片机课程设计报告学院:专业班级:姓名:指导教师:设计时间:51单片机课程设计一、设计任务与要求1.任务:制作并调试51单片机…
-
单片机课程设计数字钟实验报告
单片机课程设计电子钟一实现功能1能够实现准确计时以数字形式显示时分秒的时间2小时以24小时计时形式分秒计时为60进位能够调节时钟时…
-
单片机课程设计实验报告封面
单片机课程设计姓名学号年级专业所在院系电气工程与自动化学院指导教师徐敏关键生提交日期1目录一课程设计任务书二设计项目简介三电路原理…
-
单片机课程设计实验报告
单片机原理与接口技术直流电机测速系统课程设计报告学院专业学生姓名学号指导教师时间一前言课程设计是培养学生综合运用所学知识发现提出分…
-
51单片机课程设计报告
学院:专业班级:姓名:指导教师:设计时间:51单片机课程设计一、设计任务与要求1.任务:制作并调试51单片机学习板2.要求:(1)…
-
51单片机课程设计实验报告
51单片机课程设计报告学院:专业班级:姓名:指导教师:设计时间:51单片机课程设计一、设计任务与要求1.任务:制作并调试51单片机…
-
单片机课程设计报告完美版
江南大学课程名称设计题目班级姓名指导教师物联网工程学院课程设计报告单片机原理及应用基于单片机的步进电机控制器设计号评分20xx年6…
-
测控单片机课程设计报告--电子时钟时分秒
一6该课程设计是利用MCS51单片机内部的定时计数器中断系统以及行列键盘和LED显示器等部件设计一个单片机电子时钟设计的电子时钟通…
-
C51单片机课程设计报告
内容提要单片微型计算机简称单片机是典型的嵌入式微控制器常用英文字母的缩写MCU表示单片机它最早是被用在工业控制领域单片机由芯片内仅…
-
51单片机课程设计报告
重庆科技学院学生实习实训总结报告学院电气与信息工程学院专业班级XXXXXX学生姓名XXX学号20xxXXXXXX实习实训地点逸夫科…