基于PLC的物料分拣机械手自动化控制系统设计开题报告
贵州大学本科生毕业论文(设计)开题报告表
说明:1、论文(设计)类型:A—理论研究;B—应用研究;C—设计等;
2、论文(设计)来源:指来源于科研项目、生产/社会实际、教师选题或其他(学生自拟)等;
3、各项栏目空格不够,可自行扩大。
第二篇:基于PLC的物料分拣机械手自动化控制系统设计
基于PLC的物料分拣机械手自动化控制系统设计【毕业设计】
发布日期:[10-05-30 17:05:04] 浏览人次:[8641
水平手臂回缩到指定的位置,PLC输入端X007接通输入,输出端Y000输出,左旋按钮SB7接通,三位四通电磁阀12的电磁铁6YA得电,执行摆动气缸的向左旋转。
垂直手臂的下降
摆动气缸向左旋转到指定位置(90度),PLC输入端X003接通输入,输出端Y005输出,垂直手臂下降按钮SB6接通,使三位四通电磁阀11的电磁铁3YA得电,执行小臂的下降运动。
放物
小臂下降到指定位置,PLC输入端X006接通输入,输出端Y007输出,吸盘放气按钮SB12接通,真空发生器停止工作,真空消失,压缩空气进入真空吸盘,将物料与吸盘吹开。
小臂上升
经滑觉传感器检测到物料已经放开,输出端Y004输出,小臂上升按钮SB5接通,使三位四通电磁换向阀10的电磁铁2YA得电,执行小臂上升动作。
回到初始位置
小臂上升到指定位置,PLC输入端X005接通输入,自动重复以上动作。
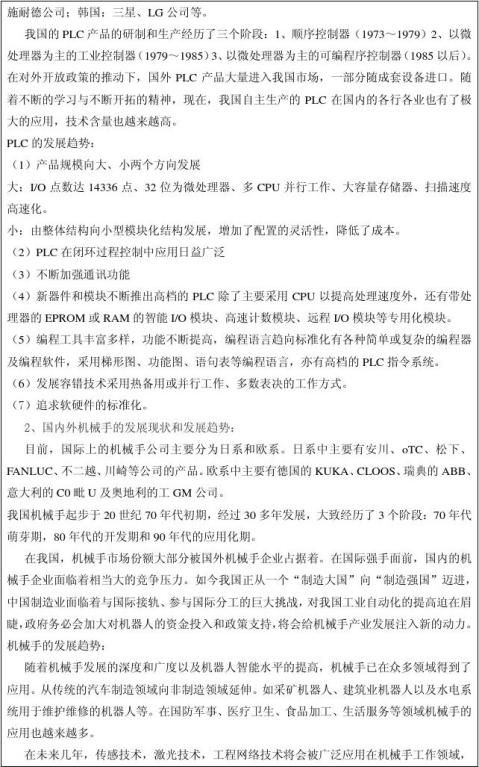
4.5 PLC程序设计
4.5.1 总体程序框图
设备有“手动/自动”两种工作方式,其控制程序可分为自动控制程序和手动控制程序两个模块,各模块程序分开编写,结构清晰,便于调试和修改。
在进行编程前,应先绘制出整个控制程序的结构框图,如图4.2所示。在该结构图中,当操作方式选择开关置于“手动”时,输入点X012接通,执行手动程序;当操作方式选择开关置于“自动”时,输入点X013接通,执行自动程序。 ]
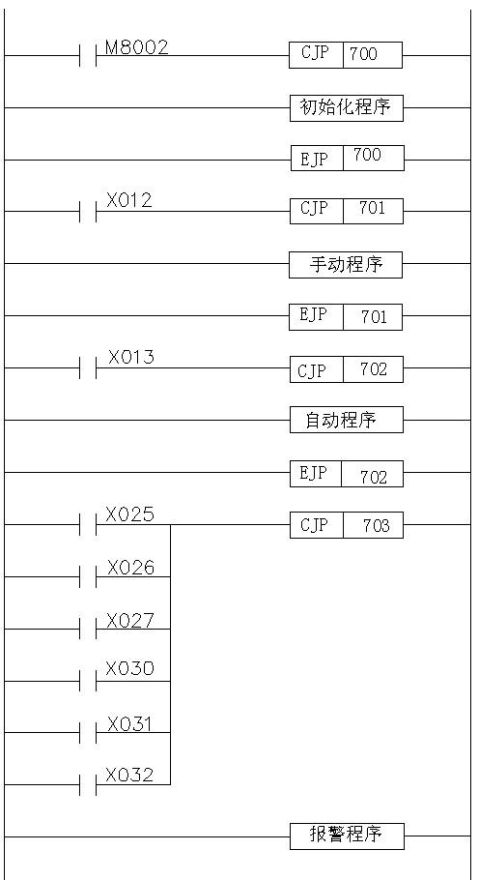
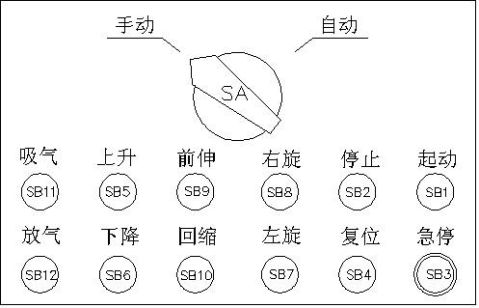
图4.2 控制程序的结构框图
同是为了方便操作,应设计一个机械手操作面板,机械手操作面板如图4.3所示
图4.3 机械手操作面板
4.5.2 初始化及报警程序
初始化及报警程序如图4.4所示
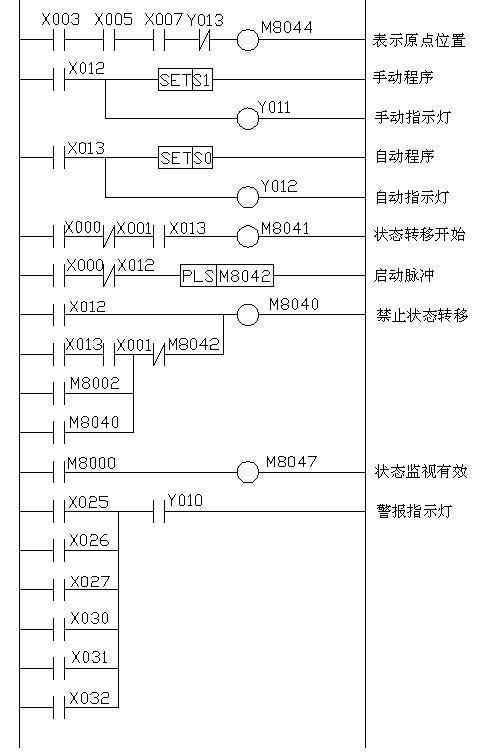
图4.4 初始化及报警程序
4.5.3 手动控制程序
手动控制程序用于实现机械手升降、伸缩、左右旋转、吸气/放气及复位的运动。在自动工作过程中,若将“手动/自动”转换开关打到“手动”位置时,输入X012接通系统进入
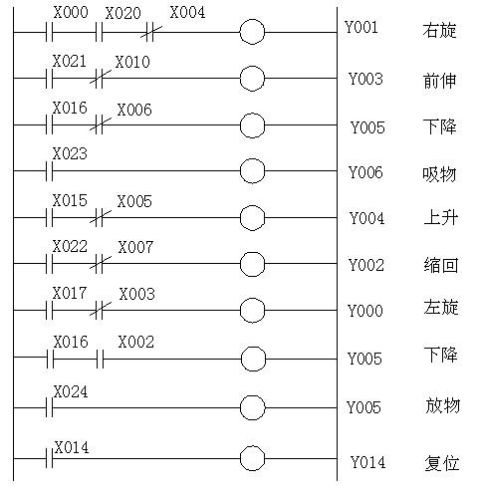
手动控制方式状态。此时,按下相应的受动按钮可实现手动上升、下降、左旋、右旋、伸出、缩回、吸气、放气及复位动作,手动操作程序如图4.5所示。
图4.5 手动操作程序
4.5.4 自动控制程序
分析知,在“自动”工作方式下,本机械手的运动是以开关量作为转移信号,按所设计的工艺流程一步一步地进行工作,其控制过程为顺序循环控制。当机械手完成一次物料的吸放任务后返回原位为下一个任务做好准备。自动控制的状态转移图如图4.6所示。

图4.6 自动控制状态转移图
根据自动控制的状态转移图就可设计出自动控制的步进梯形图如图4.7所示。
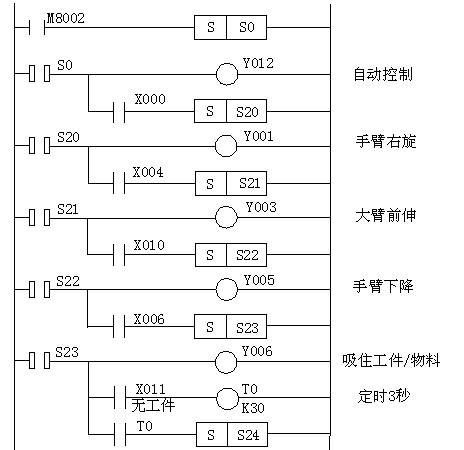
图4.7 自动控制步进梯形图
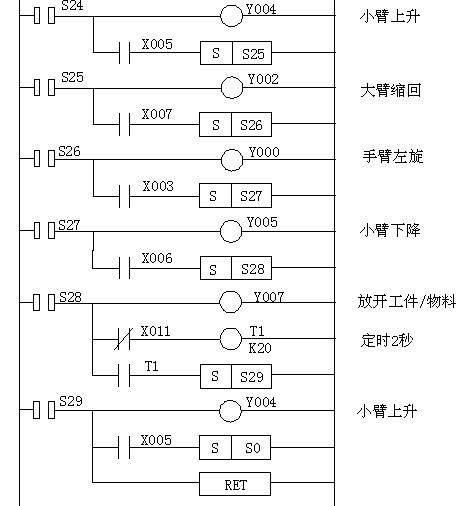
图4.7 自动控制步进梯形图 (序)
第五章 总结与展望
机械手的出现延伸和扩大了人的手足和大脑功能,它可替代人从事危险、有害、有毒、低温和高热等恶劣环境中的工作;代替人完成繁重、单调重复劳动,提高劳动生产率,保证产品质量。随着科学技术的发展和PLC在工业生产过程中的广泛应用,机械手技术方面的研究不断得到创新,促使成果不断涌现。
本论文的设计主要取得了以下成果:
对物料分拣机械手的结构形式、驱动装置、控制系统等各组成部分进行了较为全面的分析,最后得出其总体设计方案。
气动驱动系统是强的非线性系统,其根本原因是空气具有可压缩性,使得系统中存在流量饱和效应,非线性摩擦力等因素,实现气缸的精度定位非常困难。因此在其应用中,要对各参数进行调定,以达到比较理想状态。
机械手的控制系统采用了技术性、可靠性非常高的PLC进行控制。这使得机械设备更加灵活,动作准确,易于维护,劳动生产率大大得到了提高。各种操作方式自由切换,满足了各种生产要求。
本课题在完成了机械结构设计的基础上,对物料分拣机械手的驱动系统和控制系统进行了设计。由于时间的限制以及机械手的结构比较复杂,有些问题
-
机械设计制造及其自动化方向开题报告
西安电子科技大学网络教育本科毕业设计(论文)开题报告题目:机械设计制造及其自动化方向院(系):网络教育学院专业:机械设计制造及自动…
-
机械设计制造及自动化专业毕业设计开题报告
机械设计制造及自动化专业毕业设计开题报告毕业设计论文开题报告设计论文题目轻型车变速器设计机电工程系系别机械设计制造及其自动化专业姓…
-
机械制造及自动化毕业设计开题报告[1]
攀枝花学院本科毕业设计论文开题报告题目CA6140车床后托架加工工艺及夹具设计院系攀枝花学院机电工程学院专业20xx级机械设计制造…
-
机械设计制造及其自动化 专业毕业论文撰写方法与基本要求
机械设计制造及其自动化专业毕业论文设计撰写方法及基本要求适用于环保机械数控技术等各方向一开题报告的撰写方法及基本要求1如何选题开题…
-
中国石油大学 机械设计制造及其自动化 毕业设计开题报告
中国石油大学华东本科毕业设计开题报告本科毕业设计开题报告题目高强钢冷弯成型产品形状在线修正的研究学生姓名学号专业班级机械设计制造及…
-
液压系统开题报告模板
XXXX大学毕业设计论文开题报告学生姓名学号专业机械设计制造及其自动化设计题目四柱万能液压机的液压系统设计指导教师XXX20xx年…
-
ZL50装载机工作装置及液压系统设计开题报告
ZL50装载机工作装置结构及液压系统设计开题报告一课题名称ZL50装载机工作装置结构及液压系统设计二课题背景及现状自90年代以来国…
-
组合机床液压系统开题报告(专科)
新乡学院毕业论文设计开题报告表院系名称专业名称年级学生姓名学号指导教师姓名机电工程学院机械制造与自动化10级填表时间20xx年3月…
- 500t液压机设计开题报告
-
某型轿车悬架设计开题报告
毕业设计(论文)材料之二(2)本科毕业设计(论文)开题报告题目:某型轿车悬架设计DesignofAAutomobilesSuspe…
-
机械手PLC自动控制系统的设计毕业设计开题报告
浙江工业职业技术学院毕业设计开题报告题目机械手PLC自动控制系统的设计分院电气工程分院专业电气自动化技术班级学号姓名指导教师