慧鱼机器人实验报告内容
华北电力大学
综合性实验报告
项目名称:慧鱼创意模型开放实验
课程名称:科技创新实践3
实验人员:沙理想 测控1201班 201202030118
刘 赛 测控1201班 201202030115
实验时间:20##年11月28日
华北电力大学工程实训中心
慧鱼创意模型开放实验实验报告
一、实验目的
(1)认识了解“慧鱼”创意模型组合包中的各种硬件;
(2)了解ROBOPRO软件及编程;
(3)了解慧鱼创意模型是如何控制和协调机构运动的;
(4)锻炼机械创新设计能力,初步建立对机电一体化产品的认识。
二、实验器材
(1)“慧鱼”创意模型组合包;
(2)“慧鱼”专用电源;
(3)个人计算机;
(4)“慧鱼”专用智能接口板;
(5)ROBOPRO软件;
三、实验准备
认识“慧鱼”创意模型使用手册中已搭建的示例模型。
四、实验内容
2.红绿灯
(1)完成模型与接口板、接口板与计算机之间的连接;
(2)分别测试马达、灯、信号开关;
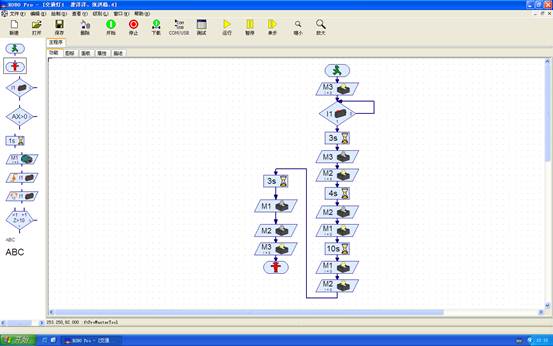
(3)编写控制程序,实现红绿灯通常情况为绿灯亮,当有行人按下按钮I1,3秒后绿灯灭,黄灯亮,4秒后黄灯灭,红灯亮,红灯持续亮10秒钟,接着红灯、黄灯同时亮3秒钟,随后红、黄灯灭,绿灯亮。
(4)写出实验报告:说明模型的工作原理,附上所编程序。
原理:利用计时器,当有人时,绿灯亮;当过一定时间后,红灯亮,绿灯灭;然后黄灯亮。当程序如下:
3.移动门
(1)完成模型与接口板、接口板与计算机之间的连接;
(2)分别测试马达、灯、信号开关、光电传感器,搞清马达、灯、光电传感器的作用;
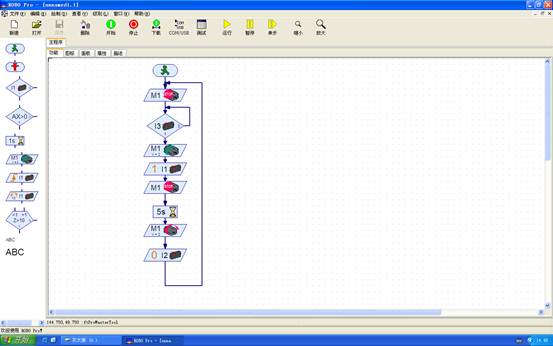
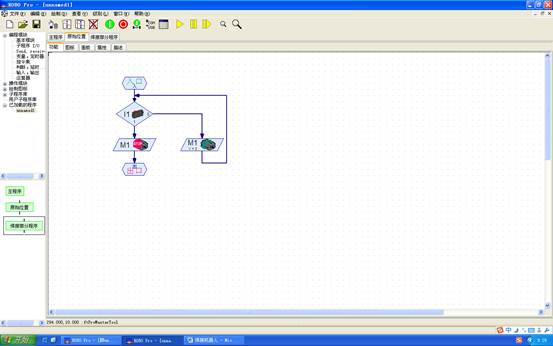
(3)编写控制程序,并运行使模型实现按下按钮I3,门打开,5秒钟后关闭。编程注意事项:首先要关门,这是起始位置,马达旋转直到门碰到限位开关I1=0;查询按钮I3,如果按下,门打开,启动马达向左直到限位开关I2为1;5秒后再次关门(到程序开始处循环)
(4)编写控制程序,并运行使模型实现:在作业一的基础上增加光传感器,防止顾客动作慢,门夹住他。注意只有在光幕没有遮住时,门才能关闭;在关门时只要光幕被遮住,门应立即打开;只要光幕被遮住,即使按钮没有按下门也要打开。
原理:在门的一端安装感应器,当有人通过时,感应器传导信号至主控制器,然后通知马达并监控马达转速,从而达到自动开关门效果。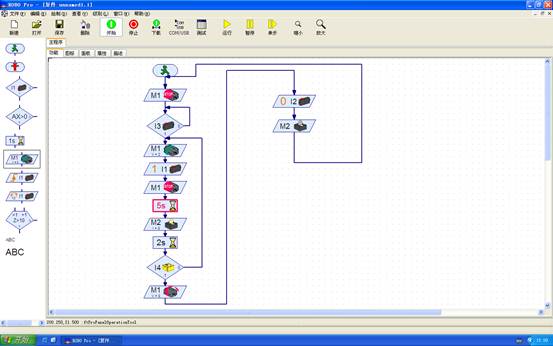
(5)写出实验报告:说明模型的工作原理,附上所编程序。程序如图所示
4.温度控制器
(1)完成模型与接口板、接口板与计算机之间的连接;
(2)分别测试马达、灯、计数器、NTC电阻、位置传感器,搞清马达、灯、计数器、NTC电阻、位置传感器的作用;
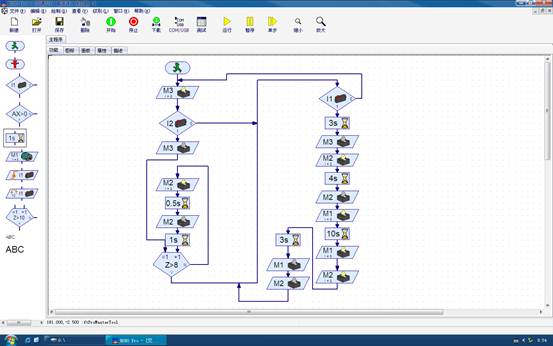
(3)聚焦灯泡作为加热器连接输出M2,风扇作为冷却单元连接输出M1,NTC电阻测量温度输出连接输入AX。编写控制程序,并运行使模型实现温度高于设定上限温度(360)时,加热器停止,风扇工作直至冷却到下限值(320),然后风扇停止,加热器工作。注意:要用模拟量判断模块来设定这两个温度值,且温度的实际值通过面板显示的显示屏来显示。
(4)写出实验报告:说明模型的工作原理,附上所编程序。
答:该模型利用聚光灯泡给热敏电阻加热,设置温度的变化值。当温度低于设定温度是,灯泡打开,给其加热;当温度高于设定温度时,风扇打开给其降温。如此设计,就可以达到预期效果。程序如下:

5.焊接机器人
(1)完成模型与接口板、接口板与计算机之间的连接;
(2)分别测试马达、开关、灯、脉冲计数器,搞清马达、灯、接触开关的作用;
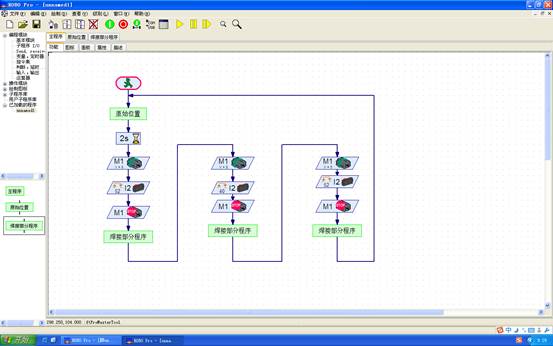
(3)运行给定的控制程序,这是一个可以实现空间定位焊接的程序,指出如何实现在同一平面内的点焊接;
(4)写出实验报告:说明模型的工作原理,指出程序中是如何判断焊接机器人到达焊点位置的,修改控制程序,实现同一平面点焊接,附上所编程序。
答:程序如图所示。基本工作原理:由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,机器人将精确地按示教动作,一步步完成全部操作,实际示教与再现。焊接机器人分弧焊机器人和点焊机器人两大类。弧焊机器人可以应用在所有电弧焊、切割技术及类似的工业方法中。
一套完整的弧焊机器人系统,应包括机器人机械手、控制系统、焊接装置、焊件夹持装置。夹持装置上有二组可以轮番进入机器人工作范围的旋转工作台。
弧焊机器人通常有五个自由度以上,具有六个自由度的弧焊机器人可以保证焊枪的任意空间轨迹和姿态。这种弧焊机器人应具有直线的及环形内插法摆动的功能,共六种摆动方式,以满足焊接工艺要求。
6.自己设计创建模型
简要说明所拼装模型的功能及工作原理,并用机构运动简图表示模型的运动,用文字或方框流程图说明模型运动的控制思想,并将运行成功的模型运动控制程序,完成慧鱼创意实验后的体会。
设计模型:一个打猎机器人的设计方案
1.机器人系统设计为航空模型结构,运动方式为飞行,整体结构应该选择直升机方式或者其他飞行器模式。
2.机器人的控制方式为无线电遥控,同时机器人配备数字摄像机将野外的环境实时发送给控制者,控制者通过接收到的影像控制机器人的运动以及武器系统。
3.机器人的动力系统为锂电池和小型电动机,追求隐蔽性和快速性。
4.机器人的武器系统设计为现代小型实弹枪支,发射特制小型子弹,通过数字摄像机进行光学瞄准或加装激光瞄准器。
感受:机器人是21世纪人类的杰作,是社会发展的需要。它在某种程度上代替了手工制作,得到了手工业的解放,同时提高了生产效率。体现了21世纪是科技时代。它被广泛的运用于社会的各个领域。社会的进步推动了它的发展,让它趋于完美。
感受:慧鱼机器人是模拟生活中的机器或为了实现某一动作而设计的,目的在于让我们了解机器中的零部件及他们的功用,将理论与实际相结合。它蕴涵着“不怕做不到就怕想不到的”创新思想。它一方面带给了我们自己动手的机会,让我们在手工上得到了锻炼,另一方面让我们认识到创新的重要性。作为现代大学生不仅仅学习课本知识,更重要的是能力的培养。
制作慧鱼机器人的过程当中,认识了很多运动结构,并从中得到了启发。做出了智能机器人,可以说是小有成就。但回顾过去,曾遇到了种种困难,特别是在程序设计过程中,对此我们是一个地地道道的门外汉,通过老师的指导和大家的努力,终于小有收获。
在这次锻炼中,我特别感觉到一个团队更需要的是团结,一个团队就是一个集体,大家的力量才是真正的力量。只有团结,才能克服困难,走向成功。
第二篇:项目报告(慧鱼机器人)
苏州工业园区 职业技术学院
第一学期项目报告
时间:2009~~2010
项目名称:慧鱼机器人 指导老师:王呈呈
系 部:信息工程系
班 级:移动
组 员:
09301 强、左婷、陈杨、宗慕倩 陈亚洲、张家栋、张浩、姚振
一、慧鱼机器人的初步了解。
年从他的利——六面拼接体开始,发明了“慧鱼创意组合模型,能够展示科学原理和技术过程,为工厂研究设计工业自动化机器提供模拟、示范。
采用 慧鱼公司的创始人Artur Fischer 博士拥有专利5000 多项。他在1964慧鱼构件进行机器人创意制作,需要经过如下4 个阶段
1、培养手感阶段
2、模仿阶段
3、改进阶段
4、创新阶段
1、培养手感阶段
在这一阶段中,主要是熟悉慧鱼的各种构件,并锻炼用双手熟练拆装。
2、模仿阶段
按照操作手册中的示范,按顺序安装,做出完美的模型。
3、改进阶段
改进模型,做出不同的模型,培养学习想象力及创造力。
4、创造新阶段
从使用双手,模仿与改进,到左右脑的配合运用而创造出新的模型,这是慧鱼模型使用的完整过程,也是学生创造力培养的科学过程。
二、慧鱼的简单介绍
1、材料
优质尼龙塑胶、辅件为不锈钢、铝合金
2、特点
工业燕尾槽机构,六面皆可拼接,反复拆装,无限扩充
机械元件
齿轮、联杆、链条、履带、齿轮(齿轴、齿条、涡轮、涡杆、凸轮、弹簧、曲轴、万向节、差速器、轮齿箱、铰链等。)
电气元件
直流电机(9V双向),红外线发射接收装置、传感器(光敏、热敏、磁敏、触敏),发光器件,电磁气阀,接口电路板,可调直流变压器(9V,1A,带短路保护功能)。
气动元件
气缸、气阀(手动、电磁阀)、气管、管接头(三通、四通)、气泵、储气罐等。
三、慧鱼涉及的基础程序——ROBO接口板的编程
利用慧鱼上述工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何技术过程的还原,更可以实现工业生产和大型机械设备操作的模拟,从而为实验教学、科研创新和生产流水线可行性论证提供了可能。
ROBO接口板可以使电脑和模型之间进行有效的通信.它可以传输来自软件的指令,比如激活马达或者处理来自各种传感器的信号。
ROBO接口板的编程语言
对ROBO接口板的标准编程软件是图形化的编程语言ROBPRO。
ROBO接口板处理器也可以由C编译器来编程。在线模式下,接口板可以用任意想要的高级编程语言通过USB或串口来激活。
简单的编程例题
1、设计一扇可以自动打开的车库大门,当你开着车到了车库门口,按一下传达室按钮,门便由一个电机牵引着打开了。这台电机一直保持运转,直到门完全打开。间隔一定时间后车库门自动关闭。
2、用它对进入博物馆的游客和出博物馆的游客进行计数,并且只要仍有游客在博物馆就打开红色告警灯。
四、慧鱼模型装配注意事项
1、在组装的每一步中,注意所用元器件的长短、粗细、安装的先后次序及位置。
2、机械构件装配时要确保构件到位,不滑动。
3、电子构件装配时要注意电子元件的正负极性,接线稳定可靠,没有松动。
4、气动构建装配时要注意各连接处密封可靠,不要有漏气现象。
5、整个模型完成后还要考虑模型的美观,整理布线要规范。
五、小结
在项目学习的过程中,我们学会了耐心,遇到问题耐心冷静的去寻找答案,我们发掘我们的潜能,我们用创新的思想来设计我们想到的方案,我们从设计体会到了创新设计的乐趣。
在学期项目我们体会到了团队精神,团队合作是非常重要的,大家的想法是我们创新的源泉,我们在设计过程中会遇到形形色色的问题,这时候团队的力量就会显示出来,很快的就能把问题解决掉,这使我们的项目学习的进度加快。
在学期项目中我们不仅仅学到了知识,我们也的到了很多的乐趣,有解决问题时的喜悦,有遇到问题时的烦恼。这是我们大学生活中的乐趣。
-
机器人实验报告
班级电气0901姓名廖勇为学号0912108110实验七机器人走迷宫实验实验内容步骤1机器人从迷宫入口出发用最少的时间走出迷宫到达…
-
智能机器人实验报告
《智能机器人》实验报告学院:数理与信息工程学院专业:计算机科学与技术(师范)学号:姓名:教师:上交时间:20XX年12月19日成绩…
-
机器人技术实验报告
课程实验报告论文题目机器人技术试验报告学院工学院专业名称机械设计制造及自动化班级机械08学号081014104081014404姓…
-
制作机器人实验报告二心得
机器人实验报告二仿生机器人、人形机器人运动控制[实验目的]熟悉仿生机器人、人形机器人运动控制方法。制作仿生机器人取物品的动作,制作…
-
机器人实验报告
班级测控0802姓名24任晓亮060820xx23张肖肖060820xx机器人实验报告实验一创意之星标准版开发环境入门一实验目的1…
-
制作机器人实验报告二心得
机器人实验报告二仿生机器人、人形机器人运动控制[实验目的]熟悉仿生机器人、人形机器人运动控制方法。制作仿生机器人取物品的动作,制作…
-
机电综合实验报告-两轮机器人
机电综合实验之机电一体化综合控制实验报告课程项目两轮智能移动机器人院系机械与运载工程学院班级20xx级车辆班姓名学号二O一四年目录…
-
机电综合实验两轮智能移动机器人实验报告书
机电综合实验之机电一体化综合控制实验报告书题目两轮智能移动机器人实验者学号班级日期20xx12291目录一实验目的3二实验对象3三…
-
智能机器人实验报告
《智能机器人》实验报告学院:数理与信息工程学院专业:计算机科学与技术(师范)学号:姓名:教师:上交时间:20XX年12月19日成绩…
-
机器人实验报告
院系电气信息工程学院班级XX级电气X班姓名XXX提交日期机器人实验报告前言作为先进制造业中不可替代的重要装备和手段工业机器人已经成…
-
机器人实验室申请书格式
机器人实验室报名表姓名年级班级照片一自我介绍有何特长获奖情况担任职务为何加入二期中考考试成绩三监护人信息姓名关系家庭住址工作单位四…