机器人实验报告
班级:电气0901 姓名:廖勇为 学号:0912108110
实验七机器人走迷宫实验
实验内容、步骤:
1)机器人从迷宫入口出发,用最少的时间走出迷宫,到达迷宫的出口。
2)走出迷宫后显示出行走的时间(行走时间越少越好)。
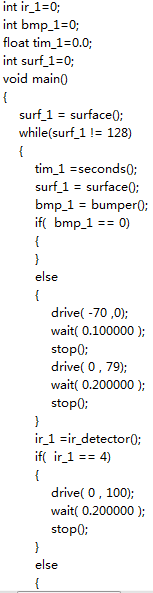
分析:首先需要检测地面传感器函数surface() 的返回值与不同地面颜色标志的关联,这样才能让机器人分辨出迷宫的出口。编写程序如下:(进行检测地面传感器函数surface() 的返回值的采集,可在“找地雷场地”中找到环境。)
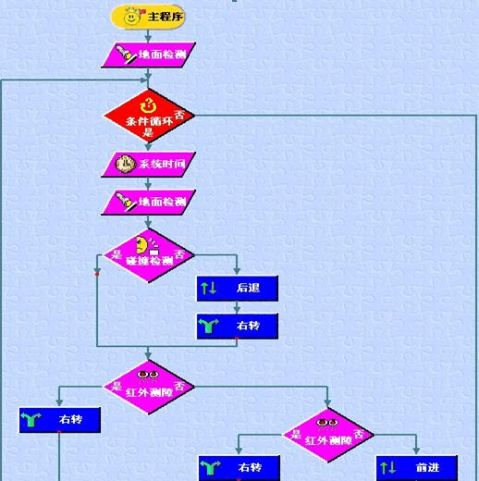
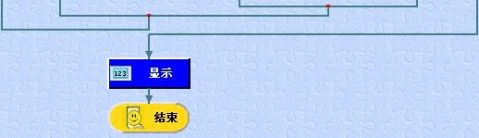
程序流程图:
Jc代码:
2
3
运行结果:
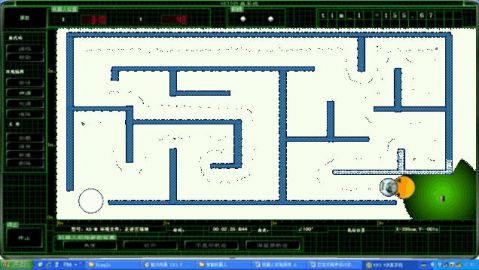
运行结果:首先进行地面检测,接着进入条件循环,碰撞检测后进行红外避障。否则结束,即说明已经找到火源了。
4
班级:电气0901 姓名:廖勇为 学号:0912108110
实验八 综合实验及测试
一、在较安静的情况下,机器人静止不动,当有人发出声音时机器人开始自由行走:机器人在行走的过程中分辨障碍物,遇到障碍物时发出声音报警并避开,继续行走。(30分)
要求:(1)写出机器人从静止到运动的条件值。
mic=microphone();
if(mic>150)
drive(90,0);
(2)画出对应流程图。
(1) 在较安静的情况下,机器人静止不动,当有人发出声音时,机器人开始前进(躲避路
途中的障碍)。
程序流程图:
5
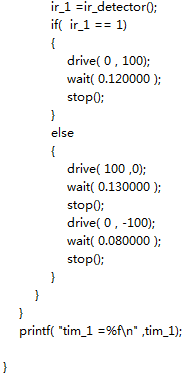
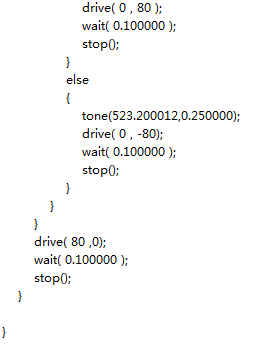
(3)写出对应JC代码。
6
7
运行结果:程序运行时,可看到当机器人听到声音时开始前进,如果前方有障碍物,机器人就发声报警,然后后退,右转;左边有障碍物,机器人就发声,右转;右边有障碍物,机器人就发声,左转,没有障碍物就前进。
(4)回答机器人在运行时使用到哪些部件。
答:红外传感器、碰撞传感器、麦克风、直流电机等。
二、自由编写程序。(70分)
要求:(1)机器人运行程序使得其具有一定的行为模式,并详细说明它是怎样一种模式。
(2)至少使用到四种传感器。
解:设计的机器人在环境中自由行走,遇到障碍物时,避开继续行走,并发出警报声, 遇到光源也发出警报声。这一行为模式需用到光敏传感器、红外传感器、碰撞传感器、电量检测和麦克风。
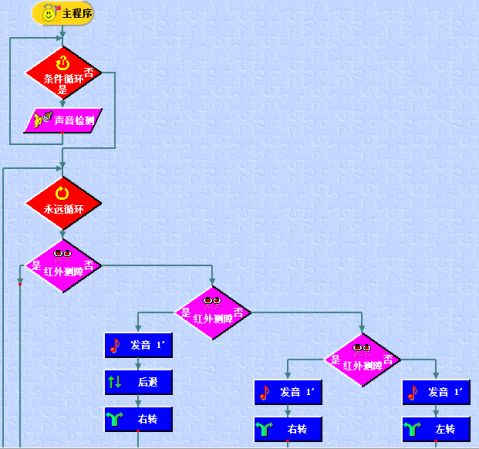
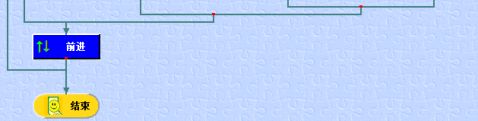
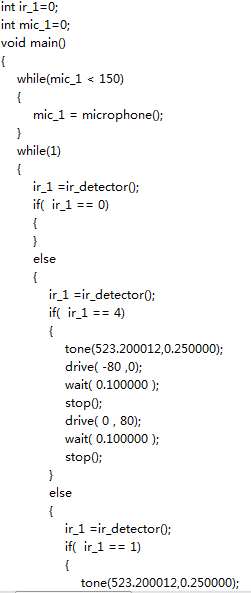
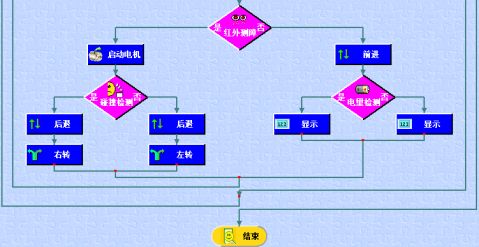
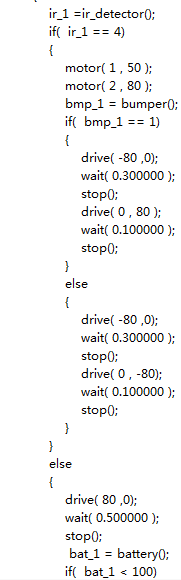
该行为模式的流程图和Jc代码:
8

9
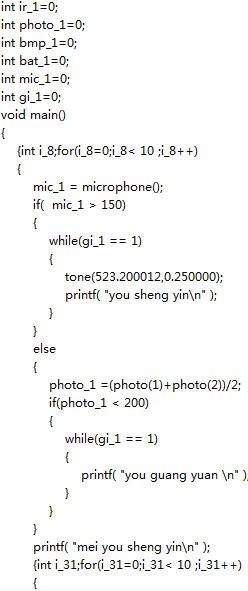
10
运行结果:程序运行时,首先检测声音,如果有声音就进入条件循环,否则就进行亮度检测;接下来进入另一个多次循环,红外避障,有障碍就启动电机,然后碰撞检测,接着做出相应的反应。否则就前进,接着进行电量检测。如此尽心10个大循环和100个小循环。
11

第二篇:工业机器人实验报告
 工业机器人实验报告
工业机器人实验报告
实验名称:机器人认知实验

一、实验目的:
二、实验设备及仪器
三、六自由度工业机器人机构简图
四、思考题
1. 说明工业机器人的基本组成及各部分之间的关系。
2. M-6iB机器人机械部分主要包括哪几部分?指出控制姿态与控制手腕动作的轴。
工业机器人实验报告
实验名称:机器人编程实验

一、实验目的:
二、实验设备及仪器
三、实验步骤
四、程序
说明动作任务,记下动作程序,并在程序后面做适当的注解说明。
五、思考题
1.简述工业机器人在实际生产运用中采用示教控制与其它控制方式相比有什么优点?
2.回忆本次实验过程,你从中学到了哪些知识。
-
机器人实验报告
班级电气0901姓名廖勇为学号0912108110实验七机器人走迷宫实验实验内容步骤1机器人从迷宫入口出发用最少的时间走出迷宫到达…
-
智能机器人实验报告
《智能机器人》实验报告学院:数理与信息工程学院专业:计算机科学与技术(师范)学号:姓名:教师:上交时间:20XX年12月19日成绩…
-
机器人技术实验报告
课程实验报告论文题目机器人技术试验报告学院工学院专业名称机械设计制造及自动化班级机械08学号081014104081014404姓…
-
制作机器人实验报告二心得
机器人实验报告二仿生机器人、人形机器人运动控制[实验目的]熟悉仿生机器人、人形机器人运动控制方法。制作仿生机器人取物品的动作,制作…
-
机器人实验报告
班级测控0802姓名24任晓亮060820xx23张肖肖060820xx机器人实验报告实验一创意之星标准版开发环境入门一实验目的1…
-
扫地机器人设计报告
扫地机器人设计报告1.调研取证当前市场上的扫地机器人多种多样,打开京东或者淘宝可以看到各个型号的扫地机器人,通过对各家进行对比获取…
-
制作机器人实验报告二心得
机器人实验报告二仿生机器人、人形机器人运动控制[实验目的]熟悉仿生机器人、人形机器人运动控制方法。制作仿生机器人取物品的动作,制作…
-
机器人课程设计报告[1]
苏州市职业大学课程设计说明书名称院系班级信管12102姓名马雁学号目录第一章绪论111课程设计任务背景112课程设计的要求2第二章…
-
机器人实验报告
院系电气信息工程学院班级XX级电气X班姓名XXX提交日期机器人实验报告前言作为先进制造业中不可替代的重要装备和手段工业机器人已经成…
-
机器人报告
西南科技大学学生实验报告实验课程名称数字化设计与制造开课实验室智能机器人与虚拟模机实验室学院制造学院专业材料成型班级学生姓名学号开…
-
机器人实训心得
工业机器人校企合作工学结合项目实训心得12电气1时前12730112720xx525在信息科学技术飞速发展的今天随着人力成本逐渐的…