自动化生产线的安装调试结业报告
自动化生产线安装与调试报告
课程名称____________________
实训班级____________________
小组成员____________________
指导教师____________________
完成日期____________________
目录
一.绪论..................................................1
二.亚龙YL-335B试验台的基本组成和工作原理。..............3
三.相应站的整体介绍......................................7 3. 1主站的动作顺序和作用..................................7
3. 2供料站的动作顺序和作用................................8
3. 3加工站的动作顺序和作用................................9
3. 4装配站的动作顺序和作用...............................10
3. 5分拣站的动作顺序和作用............................11 四.供料站的具体介绍.....................................12
4. 1气动元件.............................................12
4. 2气动控制回路.........................................13
4. 3传感器............................................... 13
4.4PLC i/o分配表及接线 .................................14
4. 5 PLC程序 .............................................16
4.6调试与运行............................................18
五.调试中遇到的问题和解决方法............................18
六.心得与体会...........................................19
绪论
现代化的自动生产设备(自动生产线)的最大特点是它的综合性和系统性,在这里,机械技术、微电子技术、电工电子技术、传感测试技术、接口技术、信息变换技术、网络通信技术等多种技术有机地结合,并综合应用到生产设备中;而系统性指的是,生产线的传感检测、传输与处理、控制、执行与驱动等机构在微处理单元的控制下协调有序地工作,有机地融合在一起。
可编程序控制器(PLC)以其高抗干扰能力、高可靠性、高性能价格比且编程简单而广泛地应用在现代化的自动生产设备中,担负着生产线的大脑——微处理单元的角色。因此,培养掌握机电一体化技术,掌握PLC技术及PLC网络技术的技术人材是当务之急。
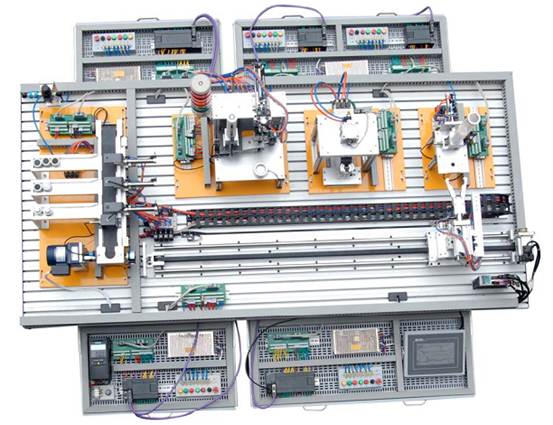
亚龙YL-335B型自动生产线实训考核装备在铝合金导轨式实训台上安装送料、加工、装配、输送、分拣等工作单元,构成一个典型的自动生产线的机械平台,系统各机构的采用了气动驱动、变频器驱动和步进(伺服)电机位置控制等技术。系统的控制方式采用每一工作单元由一台PLC承担其控制任务,各PLC之间通过RS485串行通讯实现互连的分布式控制方式。因此,YL-335B综合应用了多种技术知识,如气动控制技术、机械技术(机械传动、机械连接等)、传感器应用技术、PLC控制和组网、步进电机位置控制和变频器技术等。利用YL-335B,可以模拟一个与实际生产情况十分接近的控制过程,使学习者得到一个非常接近于实际的教学设备环境,从而缩短了理论教学与实际应用之间的距离。
YL-335B采用模块组合式的结构,各工作单元是相对独立的模块,并采用了标准结构和抽屉式模块放置架,具有较强的互换性。可根据实训需要或工作任务的不同进行不同的组合、安装和调试,达到模拟生产性功能和整合学习功能的目标,十分适合教学实训考核或技能竞赛的需要。
可编程序控制器(PLC)以其高抗干扰能力、高可靠性、高性能价格比且编程简单而广泛地应用在现代化的自动生产设备中,担负着生产线的大脑——微处理单元的角色。因此,培养掌握机电一体化技术,掌握PLC技术及PLC网络技术的技术人材是当务之急。
因此,本设计将组态技术与PLC技术,有机结合起来,运用组态技术,对自动生产线的各单元进行高仿真。达到模拟运行的目的。
二、亚龙YL-335B实验台的基本组成和工作原理
2.1 YL-335B的基本组成
亚龙YL-335B型自动生产线实验台由安装在铝合金导轨式实训台上的送料单元、加工单元、装配单元、输送单元和分拣单元5个单元组成。外形如下所示。

其中,每一个单元都可以是一个独立的系统,同时也是一个机电一体化的系统。各个单元的执行机构基本上以气动执行机构为主,但输送单元的机械手装置整体运动则采取步进电机驱动、精密定位的位置控制,该驱动系统具有长行程,多定位点的特点,是一个典型的唯一的位置控制系统。分拣单元的传送带驱动则采用了通用变频器驱动
三相异步电动机的交流传动装置。位置控制和变频器技术室现代工业企业应用最为广泛的电气控制技术。
在YL-335B设备上应用了多种类型的传感器,分别用于判断物体的运动位置,物体通过的状态,物体的颜色及材质等。传感器技术是机电一体化技术中的关键技术之一,是现代工业实现高度自动化的前提之一。
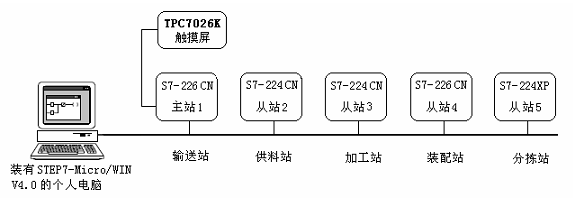
在控制方面,YL-335B 采用了基于RS485 串行通信的PLC 网络控制方案,即每一工作单元由一台 PLC 承担其控制任务,各 PLC 之间通过 RS485 串行通讯实现互连的分布式控制方式。用户可根据需要选择不同厂家的 PLC 及其所支持的 RS485 通信模式,组建成一个小型的 PLC 网络。小型 PLC 网络以其结构简单,价格低廉的特点在小型自动生产线仍然有着广泛的应用,在现代工业网络通信中仍占据相当的份额。另一方面,掌握基于 RS485 串行通信的 PLC 网络技术,将为进一步学习现场总线技术、工业以太网技术等打下了良好的基础。
YL-335B各单元在实训台上的分布的俯视图如下。
YL-335B的工作原理是使各工作单元通过网络互连构成一个分布式的控制系统,采用西门子的S7-200系列PLC的设备。
当工作单元自成一个独立的系统时,其设备运行的主令信号以及运行过程中的状态显示信号,来源于该工作单元按钮指示灯模块。按钮指示灯模块如下图所示。模块上的指示灯和按钮的端脚全部引到端子排上。

模块盒上器件包括:
⑴指示灯(24VDC) :黄色(HL1) 、绿色(HL2) 、红色(HL3)各一个。
⑵主令器件:绿色常开按钮 SB1 一个
红色常开按钮 SB2 一个
选择开关 SA(一对转换触点)
急停按钮 QS(一个常闭触点)
各工作站PLC 配置如下:
⑴输送单元:S7-226 DC/DC/DC 主单元,共24 点输入,16 点晶体管输出。
⑵供料单元:S7-224 AC/DC/RLY 主单元,共 14 点输入和 10 点继电器输出。
⑶加工单元:S7-224 AC/DC/RLY 主单元,共 14 点输入和 10 点继电器输出。
⑷装配单元:S7-226 AC/DC/RLY 主单元,共 24 点输入,16 点继电器输出。
⑸分拣单元:S7-224 XP AC/DC/RLY主单元,共 14 点输入和 10 点继电器输出。
三.相应站的介绍
3.1主站
输送单元工艺功能是:驱动其抓取机械手装置精确定位到指定单元的物料台,在物料台上抓取工件,把抓取到的工件输送到指定地点然后放下的功能。
YL—335B 出厂配置时,输送单元在网络系统中担任着主站的角色,它接收来自触摸屏的系统主令信号,读取网络上各从站的状态信息,加以综合后,向各从站发送控制要求,协调整个系统的工作。
输送单元由抓取机械手装置、直线运动传动组件、拖链装置、PLC 模块和接线端口以及按钮/指示灯模块等部件组成。下图是安装在工作台面上的输送单元装置侧部分。

具体构成如下:
⑴气动手爪:用于在各个工作站物料台上抓取/放下工件。由一个二位五通双向电控阀控制。
⑵伸缩气缸:用于驱动手臂伸出缩回。由一个二位五通单向电控阀控制。
⑶回转气缸:用于驱动手臂正反向 90 度旋转,由一个二位五通单向电控阀控制。
⑷提升气缸:用于驱动整个机械手提升与下降。由一个二位五通单向电控阀控制。
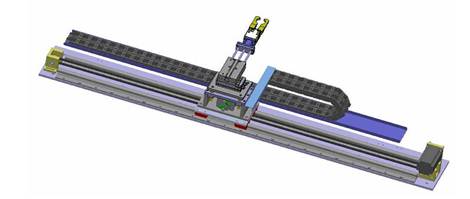
传动组件由直线导轨底板、伺服电机及伺服放大器、同步轮、同步带、直线导轨、滑动溜板、拖链和原点接近开关、左、右极限开关组成。
3.2供料站
供料单元的主要结构组成为:工件装料管,工件推出装置,支撑架,阀组,端子排组件,PLC,急停按钮和启动/停止按钮,走线槽、底板等。其中,机械部分结构组成如下图所示。
该部分的工作原理是:工件垂直叠放在料仓中,推料缸处于料仓的底层并且其活塞杆可从料仓的底部通过。当活塞杆在退回位置时,它与最下层工件处于同一水平位置,而夹紧气缸则与次下层工件处于同一水平位置。在需要将工件推出到物料台上时,首先使夹紧气缸的活塞杆推出,压住次下层工件;然后使推料气缸活塞杆推出,从而把最下层工件推到物料台上。在推料气缸返回并从料仓底部抽出后,再使夹紧气缸返回,松开次下层工件。这样,料仓中的工件在重力的作用下,就自动向下移动一个工件,为下一次推出工件做好准备。
3.3加工站
加工单元的功能是完成把待加工工件从物料台移送到加工区域冲压气缸的正下方;完成对工件的冲压加工,然后把加工好的工件重新送回物料台的过程。
加工单元装置侧主要结构组成为:加工台及滑动机构,加工(冲压)机构,电磁阀组,接线端口,底板等。其中,该单元机械结构总成如下图所示。
工作原理:滑动加工台在系统正常工作后的初始状态为伸缩气缸伸出,加工台气动手指张开的状态,当输送机构把物料送到料台上,物料检测传感器检测到工件后, PLC 控制程序驱动气动手指将工件夹紧→加工台回到加工区域冲压气缸下方→冲压气缸活塞杆向下伸出冲压工件→完成冲压动作后向上缩回→加工台重新伸出→到位后气动手指松开的顺序完成工件加工工序,并向系统发出加工完成信号。为下一次工件到来加工做准备。
3.4装配站
装配单元的功能是完成将该单元料仓内的黑色或白色小圆柱工件嵌入到放置在装配料斗的待装配工件中的装配过程。
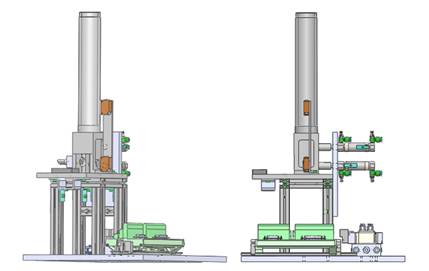
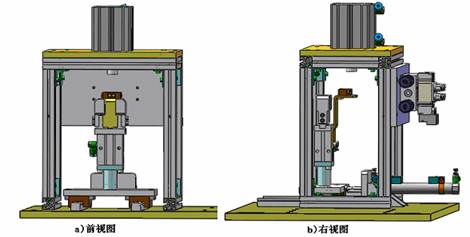
装配单元的结构组成包括:管形料仓,供料机构,廻转物料台,机械手,待装配工件的定位机构,气动系统及其阀组,信号采集及其自动控制系统,以及用于电器连接的端子排组件,整条生产线状态指示的信号灯和用于其他机构安装的铝型材支架及底板,传感器安装支架等其它附件。其中,机械装配图如下图所示:
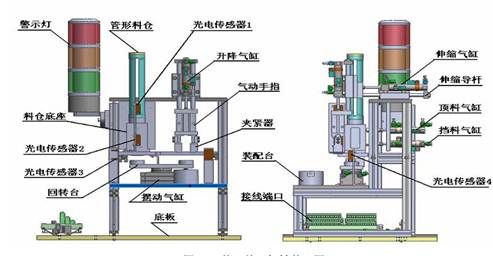
工作过程:PLC 驱动与竖直移动气缸相连的电磁换向阀动作,由竖直移动带导杆气缸驱动气动手指向下移动,到位后,气动手指驱动手爪夹紧物料,并将夹紧信号通过磁性开关传送给 PLC, 在 PLC 控制下, 竖直移动气缸复位, 被夹紧的物料随气动手指一并提起,离开当廻转物料台的料盘,提升到最高位后,水平移动气缸在与之对应的换向阀的驱动下,活塞杆伸出,移动到气缸前端位置后,竖直移动气缸再次被驱动下移,移动到最下端位置,气动手指松开,经短暂延时,竖直移动气缸和水平移动气缸缩回,机械手恢复初始状态。
3.5分拣站
分拣单元是完成对上一单元送来的已加工、装配的工件进行分拣。使不同颜色的工件从不同的料槽分流的功能。当输送站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区进行分拣。
分拣单元主要结构组成为:传送和分拣机构,传动带驱动机构,变频器模块,电磁阀组,接线端口,PLC 模块,按钮/指示灯模块及底板等。其中,机械部分的装配总成如下图。
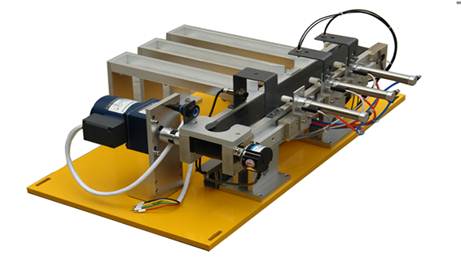
传送和分拣的工作原理:当输送站送来工件放到传送带上并为入料口漫射式光电传感器检测到时,将信号传输给 PLC,通过 PLC 的程序启动变频器,电机运转驱动传送带工作,把工件带进分拣区,如果进入分拣区工件为白色,则检测白色物料的光纤传感器动作,作为 1 号槽推料气缸启动信号,将白色料推到 1 号槽里,如果进入分拣区工件为黑色,检测黑色的光纤传感器作为 2 号槽推料气缸启动信号,将黑色料推到 2 号槽里。自动生产线的加工结束。
四.供料站的具体介绍
4.1气动元件
供料站气动控制回路采用标准双作用直线气缸作为执行元件为了使气缸的动作平稳可靠,使用单向节流阀单对气缸的运动速度加以控制,向节流阀是由单向阀和节流阀并联而成的流量控制阀,常用于控制气缸的运动速度,也称为速度控制阀。
单电控电磁换向阀、电磁阀组。YL-335B 所有工作单元的执行气缸都是双作用气缸, 因此控制它们工作的电磁阀需要有二个工作口和二个排气口以及一个供气口,故使用的电磁阀均为二位五通电磁阀。 供料单元用了两个二位五通的单电控电磁阀。两个电磁阀是集中安装在汇流板上的。 汇流板中两个排气口末端均连接了消声器, 消声器的作用是减少压缩空气在向大气排放时的噪声。 这种将多个阀与消声器、 汇流板等集中在一起构成的一组控制阀的集成称为阀组, 而每个阀的功能是彼此独立的。
4.2 气动控制回路
气动控制回路是本工作单元的执行机构,该执行机构的控制逻辑与控制功能是由PLC 实现的。气动控制回路的工作原理如图2-1所示。
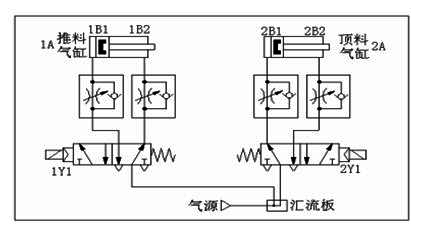
气动控制回路的工作原理2-1
图中1A和2A分别为推料气缸和顶料气缸。1B1和1B2为安装在推料缸的两个极限工作位置的磁感应接近开关,2B1和2B2为安装在推料缸的两个极限工作位置的磁感应接近开关。1Y1和2Y1分别为控制推料缸和顶料缸的电磁阀的电磁控制端。通常,这两个气缸的初始位置均设定在缩回状态。
4.3传感器
YL-335B 各工作单元所使用的传感器都是接近传感器, 它利用传感器对所接近的物体具有的敏感特性来识别物体的接近,并输出相应开关信号。
1、磁性开关
YL-335B 所使用的气缸都是带磁性开关的气缸。这些气缸的缸筒采用导磁性弱、隔磁性强的材料,如硬铝、不锈钢等。在非磁性体的活塞上安装一个永久磁铁的磁环,这样就提供了一个反映气缸活塞位置的磁场。而安装在气缸外侧的磁性开关则是用来检测气缸活塞位置,即检测活塞的运动行程的。
在磁性开关上设置的 LED 显示用于显示其信号状态,供调试时使用。磁性开关动作时,输出信号“1” ,LED亮;磁性开关不动作时,输出信号“0” ,LED不亮。
磁性开关的安装位置可以调整,调整方法是松开它的紧固定位螺栓,让磁性开关着气缸滑动,到达指定位置后,再旋紧固定螺栓。
磁性开关有蓝色和棕色2根引出线, 使用时蓝色引出线应连接到 PLC 输入公共
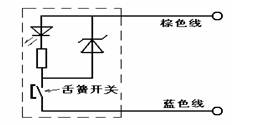 端,棕色引出线应连接到PLC 输入端。
端,棕色引出线应连接到PLC 输入端。
2、漫射式光电接近开关

漫射式光电接近开关供料单元中,用来检测工件不足或工件有无的漫射式光电接近开关选用神视(OMRON)公司的 CX-441(E3Z-L61)型放大器内置型光电开关(细小光束型,NPN 型晶体管集电极开路输出),。该光电开关的外形和顶端面上的调节旋钮与显示灯如图2-2所示。CX-441(E3Z-L61)光电开关的外形和调节旋钮、显示灯。
图 2-2
4.4PLC的i/o接线
根据工作单元装置的I/O 信号分配(表2-3)和工作任务的要求,供料单元PLC 选用S7-224 AC/DC/RLY 主单元,共14点输入和10点继电器输出。PLC 的 I/O 信号分配如表2-4所示,接线原理图则见图2-5。
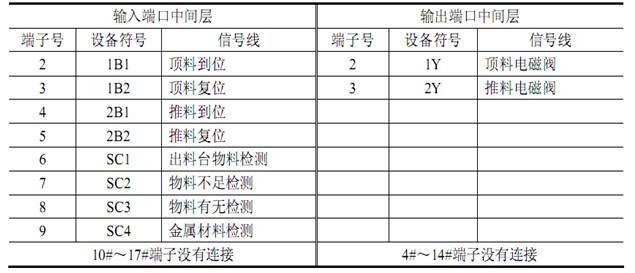
表 2-3 供料单元装置侧的接线端口信号端子的分配

图2-4 供料单元PLC的 I/O分配表
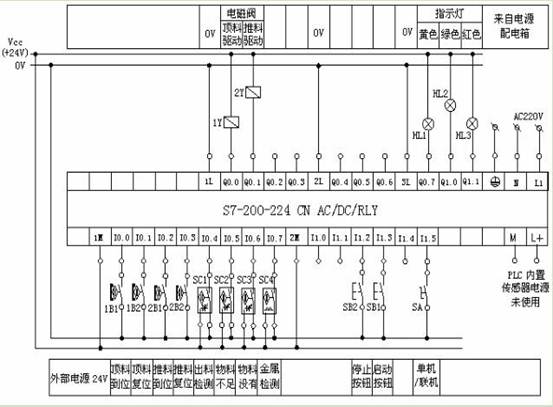
图2-5 供料单元PLC的接线图
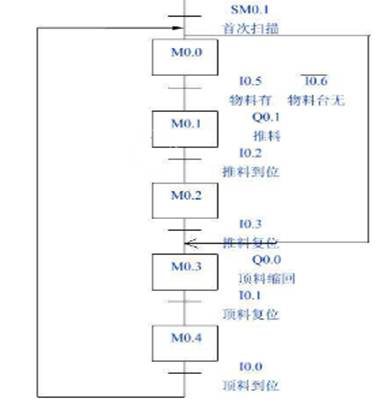
4.5 PLC程序图

4.6调试与运行
(1)调整气动部分,检查气路是否正确,气压是否合理,气缸的动作速度是否合
理。
(2)检查磁性开关的安装位置是否到位,磁性开关工作是否正常。
(3)检查 I/O 接线是否正确。
(4)检查光电传感器安装是否合理,灵敏度是否合适,保证检测的可靠性。
(5)放入工件,运行程序看加工单元动作是否满足任务要求。
(6)调试各种可能出现的情况,比如在任何情况下都有可能加入工件,系统都要
能可靠工作。
(7)优化程序。
五.调试过程中遇到的问题及解决办法
问题: 在调试的过程中,遇到很多问题,其中最大的问题是顶料气缸在伸出后不能自动保持,立马缩回。造成推料气缸在缩回之前顶料气缸就已经缩回,物料落下卡住退料气缸,致使缩回不畅。长此以往,会使气缸损坏。
解决办法:通过分析该站的动作过程,经修改PLC控制程序,在顶料气缸程序处加入延时装置,通过设定时间,使其延时缩回,可以上述问题解决,运动流畅;还可以在程序中加入置位复位按钮,也可解决该问题。
六.心得与体会
通过自动线安装与调试这门课程,让我们对于自动化生产线有了深入透彻的认识,了解了plc在生产实际生活中的应用,更感受到了它的强大作用,有了plc,使工业或进程推进了一大步。
在上课过程中,通过分组练习,对相应站点的程序进行调试,让我们真真切切的感受到了生产线的作用。在编程与调试程序的过程中遇到了不少的问题,通过小组内部讨论和组间的交流,再加上老师的点拨,基本能够解决遇到的一些问题,能够进行简单的编程与调试工作,并增强了沟通与交流的能力和解决问题的能力。
这门课程使我更加深入的了解了自己的专业,知道了它的广泛领域。再次感谢老师的教导。
-
自动化生产线安装与调试实训室人员培训总结
贵州电子信息职业技术机电工程系自动化生产线安装与调试实训室人员培训总结一培训目的1掌握YL335B设备的使用与维护2掌握PLC的使…
-
自动化生产线的安装调试结业报告运输站部分
自动化生产线安装与调试报告课程名称实训班级小组成员指导教师完成日期目录一绪论1二亚龙YL335B试验台的基本组成和工作原理2三相应…
-
自动生产线安装与调试实习报告
广东机电职业技术学院自动生产线安装与调试实习报告专业:电气自动化班级:电气1208学生姓名:**学号:**指导教师:**实习学期:…
-
自动化生产线安装与调试开题报告
常州工程职业技术学院20xx届毕业设计常州工程职业技术学院毕业设计开题报告20xx届题目基于NN网络的自动化生产线的组态与实现学生…
-
哈密和鑫矿业公司副井电控系统调试报告.doc
哈密和鑫矿业公司副井提升机电控系统项目调试报告洛阳中重自动化工程有限责任公司20xx年1月29日目录一电控系统概述二电控系统技术依…
-
在线设备安装调试报告
XXX污水处理厂在线监控系统建设安装调试报告按照国家环保要求以及《在线监测系统的安装调试规范(试行)》,我公司在建厂后就在总进口和…