智能机器人实验报告

《智能机器人》
实验报告
报告题目

20##年12月
报告题目
摘 要
字体:宋体,小四;1.5倍行距
中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要中文摘要
关键词:关键词1;关键词2;关键词3;关键词4;关键词5( 3~5个)
目 录
1 一级标题... 4
1.1 二级标题... 4
1.1.1三级标题... 4
1.2 二级标题... 4
2 一级标题... 4
2.1二级标题... 4
2.1.1三级标题... 4
2.1.2三级标题... 4
3一级标题... 4
3.1二级标题... 4
3.2二级标题... 4
结论... 5
参考文献... 6
1 一级标题
1.1 二级标题
1.1.1三级标题
*正文部分*
字体:宋体,小四;1.5倍行距
1.2 二级标题
2 一级标题
2.1二级标题
2.1.1三级标题
*正文部分*
字体:宋体,小四;1.5倍行距
2.1.2三级标题
3一级标题
3.1二级标题
*正文部分*
字体:宋体,小四;1.5倍行距
3.2二级标题
结论
*正文部分*
字体:宋体,小四;1.5倍行距
参考文献
[1] 作者.题目[J].刊名(全称),出版年,卷号(期号):起始页码 [期刊]
[2] 作者.书名[M].版次(初版不写),出版地:出版者,出版年.(起始页码,非必要项)[书籍]
[3] 作者.题目[A].In(见):整本文献的编者姓名ed(多编者用eds).文集实际完整名称.出版地:出版者,出版年.起止页码[会议录(论文集、论文汇编等)]
[4] 著者.题名[D].城市名:论文收藏单位,出版年[学位论文]
[5] 著者.题名[R].科技报告,报告号,,出版年[科技报告]
第二篇:机器人实验一
实验报告之——机器人创新实验一 实验对象——探索者机器人概述
“探索者”机器人创意组件是机器时代公司推出的一套机器人创新设计理念产品。探索者采用了世界先进的仿生和欠驱动设计理念,机械结构设计概念明显,传动结构突出,可以满足绝大部分的机械原理构造。金属机械零件美观耐用,除了可以搭建常规的机器人机构,还可以组合成各种仿真动物以及智能家居用品。 探索者主控板采用了32 位高性能主控芯片,拥有C 语言编程、图形化编程及便携式编程三种编程模式,能满足任何软件水平的用户实现简单或复杂的自动化控制程序。包装箱里更配备了多种常见传感器,能让用户搭建的机器人活起来,使它们能够听到、看到、触摸到人类世界。
探索者具有以下特点:(1)突出机构设计。探索者的设计思路是采用多种具备“积木”特点的基础机械零件,搭建出各式各样的机械结构。包含大量传动机构零件,引入欠驱动设计思路。除了可以搭建出各种典型的机器人机构以外,更可以激发想象力,设计出无数种创
意独特的机器人机构。(2)控制能力优越。探索者控制器采用ARM7 LPC2138,32位的高性能主控芯片,是一款专为智能机器人和小型智能设备设计的多功能控制器。拥有巨大的缓冲区空间和强大的处理功能,可同时控制6路舵机,2路直流电机,4路传感器,并可串联协
同工作,非常适合作为智能机器人的主控制器。(3)开放电子端口。探索者开放了包括控制器和多种传感器在内的所有电子部件I/O 接口,并提供所有电子元件电路图,供用户学习使用,可进行单片机、传感器、数字/模拟电路等课程的各种实验。极大方便了有二次开发需求的用户。
一、 实验目的与内容
1. 熟悉探索者机器人的组成和开发环境;
2. 仿照探索者机器人相关教材上的实例组装机器人;
3. 根据设计的功能编写控制程序,熟悉传感器功能及核心控制板的编程方法,特别是ARM7 lpc2138的各类引脚的功能。
4. 分组独立进行创新实验,搭建机器人系统并进行调试。
二、 实验过程
我们组共由三名同学组成,整个实验过程大致靠“三步走”完成的。第一步是熟悉探索者机器人各个零件,按照训练手册上的说明进行一些模块的组装,如拼接转动模块、拼接橡胶轮模块等等。熟悉这些模块后我们就按照训练手册上给出的实例,拼装出典型四组机构,并且大家为它编写了程序驱动圆周舵机进行运动,使其达到了书上所说的功能。第二步熟悉探索者机器人各个模块拼接、传感器功能和程序设计后,再次仿照探索者创新攻略上的“招财猫”实例进行机构和程序的设计。第三步是利用前两步所学知识的基础,进行创新实验,独自设计一种机器人。
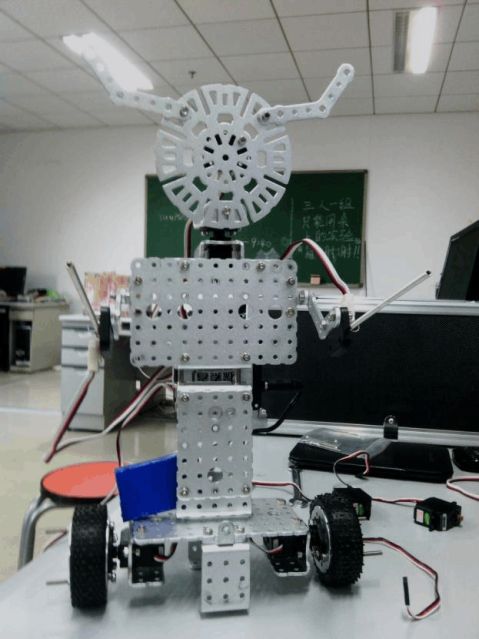
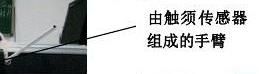
我们组三名同学经过集思广益后决定设计一种类似士兵的机器人。该机器人以两个橡胶轮胎为行走模块,每个圆周舵机控制一个轮子。这样就可以实现了士兵机器人的前进、后退与转向。士兵机器人的两手臂主要由触须传
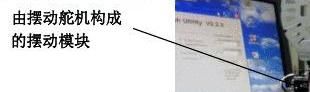
感器组成,当作士兵机器人的枪。当士兵机器人前进时,某侧触须遇到障碍物时,运行相关程序驱动行走模块中的该侧电机反转实现转向从而躲避障碍物。该士兵机器人头部由一个摆动舵机驱动,当声觉传感器遇到周围声音时,便运行相应程序驱动摆动电机,从而实现头部的左右摆动。
图一 士兵机器人的整体结构
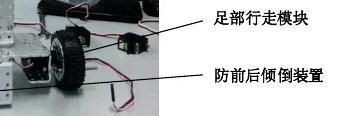





图二 从后面看士兵机器人的结构
电池
下面是驱动士兵机器人实现上述动作与功能的程序:
#include "config.h"
#include "lib_io.h"
#include "lib_arm.h"
int main(void)
{ Initial_ARM();
while(1)
{if(Input(1,1)==1)//碰到障碍物,传感器1读取状态
{LedIn(1,1);
LedIn(2,1);
LedIn(3,1);
LedIn(4,1);//板载led灯
Servo(1,170);
Servo(2,170);//转弯
DelayNS(2000);//转弯2s
}
else if(Input(1,1)==0)//传感器1读取状态,未碰到障碍物 {if(Input(3,1)==1)//声音传感器3读取状态
{LedIn(1,2);
LedIn(2,2);
LedIn(3,2);
LedIn(4,2);//板载led灯 Servo(3,80);//控制手臂摆动 DelayNS(80);
Servo(3,100);//手臂反方向摆动
DelayNS(80);
Servo(3,80);//手臂摆动
DelayNS(80);
Servo(3,100);//手臂摆动
DelayNS(80);
}
} } }
三、 实验结果
在老师的指导和帮助下,经过我们小组三名成员的齐心努力,用了多半天的时间,终于把这台士兵机器人组装起来了并设计好了程序。接下来就是实验和调
试了。打开电源开关,让ARM控制器运行设计好的程序。点击向前行的开关,士兵机器人便向前行;点击向后退的开关时,士兵机器人便向后退;当士兵机器人向前行时,左边的触须传感器先遇到障碍物时,士兵机器人的左轮将反转,从而避开障碍物;同理,右边的运行情况也是一样的。当击掌或者发出其他较大声音时,士兵机器人的头部就会向左向右摆动。总之,最终的实验结果基本符合预期的设想。
四、 收获与体会
通过这次实验,初步掌握了ARM控制器的一些基本知识,也许会了如何编写一些简单的运行程序。多次组装机器人等结构,熟练掌握了探索者机器人的各种模块。通过这次实验,我更加对机器人等相关的机电一体化自动控制技术感兴趣了,在以后我会更加强在此方面的学习。感谢老师对我们的耐心指导,也感谢我们组同学的齐心合作。
-
浙师大智能机器人实验报告
智能机器人实验报告学院:数理与信息工程学院专业:计算机科学与技术(师范)111学号:姓名:教师:上交时间:年月日实验一机器人听令出…
-
智能机器人实验报告
《智能机器人》实验报告学院:数理与信息工程学院专业:计算机科学与技术(师范)学号:姓名:教师:上交时间:20XX年12月19日成绩…
-
智能机器人实验报告
智能机器人实验报告报告题目院系名称专业名称学号学生姓名20xx年12月智能机器人实验报告第1页报告题目摘要字体宋体小四15倍行距中…
-
智能机器人实验报告
机器人实验报告一实验目的1认识能力风暴机器人并会简单编辑程序使其完成规定动作2了解能力风暴机器人内部构造认识声音光敏碰撞等传感器3…
-
智能机器人实验报告电子稿
实验一教你的机器人走路一要求与目的熟悉机器人用于走路的脚要教你的机器人学会走路同时你要掌握控制机器人走路的基本方法二内容1机器人为…
-
制作机器人实验报告二心得
机器人实验报告二仿生机器人、人形机器人运动控制[实验目的]熟悉仿生机器人、人形机器人运动控制方法。制作仿生机器人取物品的动作,制作…
-
机电综合实验报告-两轮机器人
机电综合实验之机电一体化综合控制实验报告课程项目两轮智能移动机器人院系机械与运载工程学院班级20xx级车辆班姓名学号二O一四年目录…
-
机电综合实验两轮智能移动机器人实验报告书
机电综合实验之机电一体化综合控制实验报告书题目两轮智能移动机器人实验者学号班级日期20xx12291目录一实验目的3二实验对象3三…
-
智能机器人实验报告
《智能机器人》实验报告学院:数理与信息工程学院专业:计算机科学与技术(师范)学号:姓名:教师:上交时间:20XX年12月19日成绩…
-
机器人实验报告
院系电气信息工程学院班级XX级电气X班姓名XXX提交日期机器人实验报告前言作为先进制造业中不可替代的重要装备和手段工业机器人已经成…