电机控制实验报告
目 录
一、设计说明·············································· 2
二、方框图················································2
三、直流无刷无霍尔电机驱动原理图···························2
四、直流无刷无霍尔电机原理·······························3
五、方案设计··············································3
六、程序清单·············································4
七、心得体会··············································8 附录Ⅰ、PCB图
附录Ⅱ、原理图
附录Ⅲ、元器件清单
一、 设计说明
本次科研实践的内容是实现无刷电机的调速控制,需要实现以下要求:
能够实时显示速度;
可以手动设置速度;
可以控制正反转;
可以控制电机的启停。
二、 方框图
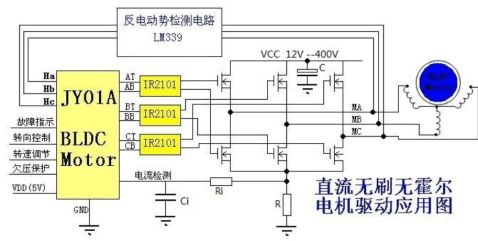
三、 直流无刷无霍尔电机驱动原理图

- 1 -
注:
● Ha,Hb,Hc输入端,内有上拉电阻,约30KΩ左右
● 电流检测回路,一般应用Ri =10K,Ci = 104P,电流采样电阻R选值参考 R =0.05/( W/V) 式中:0.05常数,W电机功率,V工作电压 如:工作电压12V,电机功率30WR=0.02(20mΩ)
● 在无霍尔驱动中,反电动势信号经过L339处理后的相位不能搞错(MA—Ha;MB—Hb;MC—Hc)。
● 驱动门电路,建议使用IR2101S做为驱动门,起到隔离与电平转换作用。
● VCC电源滤波电容C,一般按C=W/V*100式中:C单位uF W电机功率V工作电100常数。
四、直流无刷无霍尔电机原理
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体 ,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。
无刷直流电动机为了去掉电刷,将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。
五、方案设计
本系统由单片机最小系统、电源模块和JY01A驱动IC等硬件电路部分以及相应的软件部分构成。本设计采用单片机作为主控芯片,
用编程的方法来模拟无刷电机的控制逻辑,其特点是使用灵活,通过修改程序可适应不同规格的无刷电机,增加系统功能方便,JY01A驱动电路,具备调速,正反转,过流保护,短路保护,欠压保护等功能,工作稳定,防干扰能力强等特点。电源电路给单片机和驱动电路提供36V电压。
- 2 -
六、程序清单
#include<reg51.h>
#include<absacc.h>
#include<intrins.h>
#define uint unsigned int
#define uchar unsigned char
char gw,sw,bw,qw;
uchar j;
uchar f=5;
sbit p30=P3^0;
sbit p31=P3^3;
sbit p12=P1^2;
sbit p10=P1^0;
sbit p11=P1^1;
sbit p32=P3^2;
sbit p33=P3^3;
uchar k;
uchar a,b;
uchar l;
uchar flag=0;
uchar t=6;
//定时次数,每次20ms //计数次数 //PWM脉冲 输出信号 //INT1用于速度脉冲信号检测 输入信号 //正反转 输出信号 //k1 启动 、停止 //k2 减速 //k3 加速 //k4 正反转 //占空比等级 //启停标志,初始为停止状态 //脉冲加减
/***************************** 控 制 位 定 义 ******************************/ uchar code smg[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,
0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
char data led[4]={0x08,0x04,0x02,0x01}; //位码
uint x; //数码管显示的数值
display(); //数码管显示
delays(); //延时函数
key(); //按键检测
//定义字型码表
/******************************* 主 函 数 *********************************/ void main()
{
IE=0x8f; //允许INT0、INT1、T0、T1中断
TMOD=0x11; //T0、T1均为定时Model 1
TCON=0x04; //INT1脉冲触发
TH0=0xb1; //T0定时20ms
TL0=0xe0;
TH1=0xfc; //T10定时1ms
TL1=0x18;
- 3 -
TR1=1;
TR0=1;
a=0;
b=10; //启动T1 //启动T0
gw=sw=bw=qw=0; //数码管初始化
P2=0x00;
display();
}
/**************************** T0 定 时 中 断 函 数 ************************/ void t0() interrupt 1 using 2
{
TH0=0xb1;
TL0=0xe0;
a++;
if(a==20) a=0;
if(a<b) p30=1;
else p30=0;
l=b/20;
x=300*5*l;
display();
}
//重装T0 //占空比等级计算 //计算转速 //显示转速
/************************ 外 部 中 断 0 子 程 序 **************************/ void exint0(void) interrupt 0
{
b++;//增大占空比,电机加速
if(b>19) b=19;//占空比等级最大为19
}
/************************* 外 部 中 断 1 子 程 序 ************************/ void exint1(void) interrupt 0
{
b--;//减小占空比,电机减速
if(b<1) b=1;//占空比等级最小为1
}
/*********************** T1 定 时 中 断 函 数 ************************/ void t1() interrupt 1 using 1
{
TH0=0xfc; //重装T1
TL0=0x18;
}
- 4 -
/**************************** 数 码 管 显 示 ****************************/ display()
{
uchar i;
gw=x%10; //求速度个位值,送到个位显示缓冲区
sw=(x/10)%10; //求速度十位值,送到十位显示缓冲区
bw=(x/100)%10; //求速度百位值,送到百位显示缓冲区
qw=x/1000; //求速度千位值,送到千位显示缓冲区
for(i=0;i<4;)
{
P3=led[i];
if(i==0) //显示个位 { P2=smg[gw]; delays(); }
//显示十位 else if(i==1)
{
P2=smg[sw];
delays();
}
else if(i==2)
{
P2=smg[bw];
delays();
}
else if(i==3)
{
P2=smg[qw];
delays();
}
i++;
}
}
//显示百位 //显示千位
/****************************** 延 时 函 数 *********************************/ delays()
{
uchar i;
for(i=5000;i>0;i--);
}
- 5 -
/******************************* 按 键 扫 描 ********************************/ key()
{
if(p10==0)
{
while(!p10)//去抖动
{
flag++;
if(flag%2==0) EA=0;//停止
else IE=0x8a;//启动
}
}
if(p11==0)//减速
{
while(!p11)
if(t>0) t--;
else t=0;
}
if(p32==0)//加速
{
while(!p32)
if(t<10) t++;
else t=9;
}
if(p33==0)//正反转
{
while(!p33)
k=~k;
}
}
- 6 -
七、 心得体会
为期两个星期的课程实践结束,期间有许多困难,遇到过很多困难。首先对于电机方面的知识了解的不是很透彻,在实践原理方面就有诸多的不理解。需要反复的查复资料。其次,最困难的要数焊接电路了,尤其是贴片电容和贴片电阻的焊接。刚开始的时候焊接非常困难,经过老师的指导,了解了焊接的方法之后,经过自己的实践,虽然前几个焊接还是比较困难,但是熟练之后便感觉不是那么的难焊。在本次科研实践中学会的贴片的焊接方法使我们在以后的毕业设计等任务中打下了基础。
在程序设计的时候,由于需要实现的功能比较多,很多功能的实现没法很协调的实现,进过查阅课本等资料,网上搜索等手段,了解了很多功能的实现方法,经过两个人相互讨论,将问题一个一个的解决,最终完成的程序的设计。
最后,课程实践的报告,其细节有很多要注意的细节,格式,排版哪个都不能忽略。
本次的科研实践是两个一组,因此很多东西都是两个人分工合作完成,在此期间,两个人的合作能力得到了明显的提高,在遇到问题的时候两个人互相谈论,共同协作,是我们两个人在以后的学习工作中的协作能力都得到了锻炼。
这次的课程实践是毕业设计的一次预演,提前学习机体会毕业设计的流程。同时这次的科研实践也让我知道了自己在很多方面知识的欠缺,在今后一定更加注意理论知识的学习,及在实践中运用。更加注意自己动手能力的培养。
- 7 -
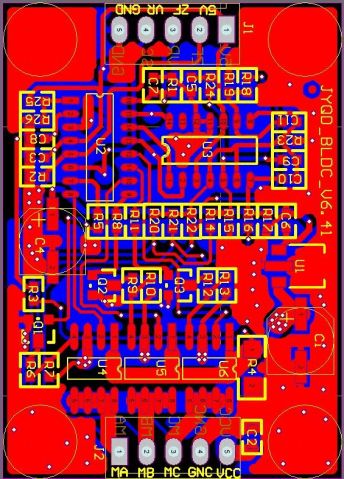
附录Ⅰ、PCB图
- 8 -
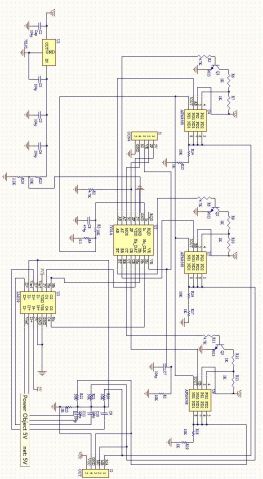
附录Ⅱ、原理图
- 9 -
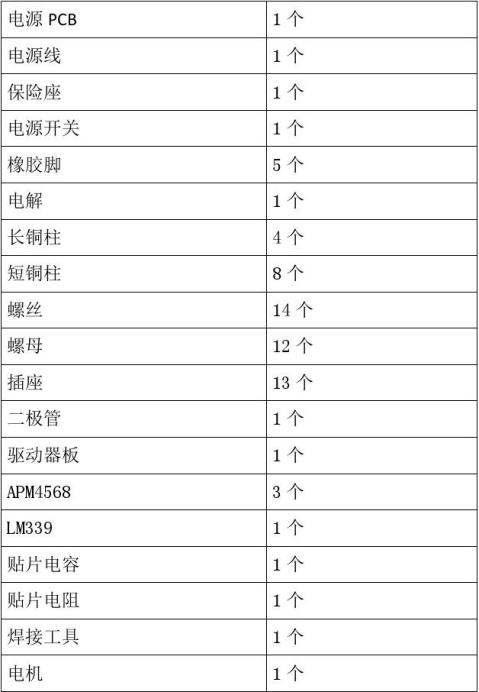
附录Ⅲ、元件清单
- 10 -
第二篇:电机控制实习 报告
南京工程学院
电力工程学院
2010/2011 学年 第 2 学期
实 习 报 告
课程名称 直流电机调速实验
实验项目名称 转速反馈控制直流调速系统仿真
实验学生班级 电气081
实验学生姓名 张鑫伟
实验学生学号 206080944
实验时间 2011.6.8
实验地点 8-319
实验报告成绩: 评阅教师签字:
年 月 日
电力工程学院二O##年制
说 明
1. 验报告为实验的重要考核依据之一, 每个实验必须定一份实验报告. 本实验报告原则上要求手写。
2.本实验报告各项内容的具体格式、字数可由指导教师根据实验具体情况提出具体要求。各项内容可另附页,为便于归档,附页尺寸不得大于本实验报告尺寸,并注意粘牢于附页粘贴处。
3. 实验报告封面中的 “实验名称” 应为实验教学大纲上所列的规范名称, “实验地点”应写出实验室的具体名称。请确认无误后再填写。
4. 实验报告的建议格式为:
一、实验目的和要求;
二、主要实验仪器和设备;
三、本次实验内容
(一)实验项目名称(按本次实验各项目填写)
1、原理或接线图
2、实验步骤及注意事项
3、实验预习过程中所遇到问题
……
四、实验记录及数据处理(主要内容包括实验具体实施步骤、 实验原始数据、 计算过程与结果、 数据曲线、 图表等。 具体 格式按指导教师要求)
五、实验结论(主要内容包括本实验小结、 实验体会或疑 问等。具体格式按指导教师要求)
5. 实验成绩由实验预习、实验表现、 实验报告三部分组成。其中前两项各占总成绩的30%。实验报告成绩依据报告的科学性、全面性、规范性及书写态度综合考核。 实验报告采用百分制, 占实验总成绩的40%, 教师请阅本报告后需签字并给出实验报告百分制成绩。
6. 实验报告需按要求时间以班级为单位交给指导教师,最长时间不得超过两周,实验报告如有明显抄袭者或不交者,实验总评成绩按 0 分记。
 基本指令编程练习
基本指令编程练习

=

-
电机控制实验报告
目录一设计说明2二方框图2三直流无刷无霍尔电机驱动原理图2四直流无刷无霍尔电机原理3五方案设计3六程序清单4七心得体会8附录PCB…
-
电机与控制实验报告
一电机与控制1长动点动控制电路1电路图2工作原理按下按钮SB2KM线圈得电由它控制的KM常开触点将闭合放开SB2按钮后在KM2常开…
- 实验三、电机控制实验报告
-
电机实验报告东南大学自动化
东南大学电机实验报告姓名学号专业自动化组员时间20xx年6月实验一二电器控制一二一实验目的1了解接触器按扭等元件的功能特点掌握其工…
-
控制电机实验
永磁式直流测速发电机实验一实验目的1了解直流测试发电机在自动控制系统中的作用2了解直流测试发电机输出电压与转速之间的关系二实验设备…
-
电机正反转实训报告文档
电气设备与拆装实训报告实训课题:1.三相异步电动机行程开关控制的正反转电路2.三相异步电动机星形/三角形换接减压起动控制专业:电气…
-
PLC电机正反转实验报告
PLC实验报告实验名称组长组员组员班级实验时间电动机基本控制单元杨键090603161翟俊090603166张万权09060317…
-
三相异步电动机的正反转控制实验报告
实验目的了解三相异步电动机接触器联锁正反转控制的接线和操作方法理解联锁和自锁的概念掌握三相异步电动机接触器的正反转控制的基本原理与…
-
PLC控制交流异步电动机正反转实验报告
实验总结报告题目PLC控制交流异步电动机正反转学院信息与通信工程学院指导老师涂兵老师专业自动化班级11级自动化2Bf学号141xx…
-
电动机正反转实验报告
实验一三相异步电动机的正反转控制线路一实验目的1掌握三相异步电动机正反转的原理和方法2掌握手动控制正反转控制接触器联锁正反转按钮联…
-
电机与电气控制实训报告
实训报告电动机控制线路的连接一实训目的1了解交流接触器热继电器按钮的结构及其在控制电路中的应用2识读简单电气控制线路图并能分析其动…