单片机生产实习报告
 生产实习
生产实习


目录
1 设计任务... 1
1.1 基础项目... 1
1.1.1单片机最小系统... 1
1.1.2 简单外围电路制作与编程... 1
1.2 提高项目... 1
2 设计思路... 2
2.1 简单外围电路设计思路... 2
2.2 提高项目设计思路... 2
3 原理图... 2
3.1 基础项目原理图... 2
4 需要器件清单... 3
5 PCB图... 5
6 程序流程图... 5
6.1 基础项目流程图... 5
6.2 提高项目流程图... 7
7 编写的上位机界面... 8
8 程序代码... 8
8.1 基础项目的代码... 8
8.2 提高项目的代码... 14
9 心得体会... 18
10 参考文献... 18
1 设计任务
1.1 基础项目
1.1.1单片机最小系统
a)实验目的:熟悉简单的布线,元器件的辨认,焊接。单片机开发环境的安装与使用。
b)实验任务:按照给定电路原理图,进行单片机最小系统的焊接:包括单片机、开关、插排、复位电路和晶振电路,正确焊接后,电路可以进行程序的下载。
1.1.2 简单外围电路制作与编程
a)实验目的:熟悉简单的单片机外围电路的原理与设计;通过汇编或C 语言编写简单的单片机程序。
b)实验任务:设计并焊接简单外围电路,包括LED 与独立按键、蜂鸣器、双位数码管。使用汇编或C 语言编写程序,使本电路完成以下功能:LED 跑马灯、双位数码管对应计数,方式一(始终一个方向)、方式二(左右循环),可准确确定周期T。每次第一个LED 亮起的时候蜂鸣器响一声(t 秒)提示。一共三个按键分别实现以下功能暂停(检测该按键有效按下后,LED 和数码管暂停,再次检测按键按下后,继续执行当前循环)、复位(检测该按键有效按下后,LED 和数码管归零重新开始以当前模式循环)、模式转换(正常运行状态,检测该按键有效按下后,数码管显示不变,LED 显示从当前)。方式转换成另一方式继续执行。
1.2 提高项目
所选提高项目为与上位机串口通信。
核心器件:无
功能描述:通过串口与上位PC 机进行双向通信。
检查方式:请指导教师检查。
要求:向老师说明电路设计功能,并进行展示。
2 设计思路
2.1 简单外围电路设计思路
外围电路主要包括:8个LED驱动电路、2P数码管驱动电路、3个按键电路、以及蜂鸣器驱动电路。由于51单片机的驱动能力弱,所以LED驱动电路选择了共阳的接法,把8个LED的阴极分别接到了P1的八个IO上;由于数码管是共阳的解法,我选择了数码管的8个段选接到的开漏的P0口,其2个位选通过2个NPN三极管S8050的开关作用进行控制,其2个控制端分别分配在了P2^6、P2^7引脚上;按键电路防止信号干扰,选择了上拉,由于有三个按键,单片机只有两个外部中断,模拟外部中断也挺麻烦,所以决定暂停播放的按键和模式切换的按键分配在了2个外部中断引脚P3^2、P3^3,另外一个接在了普通IOP2^0上;蜂鸣器采用的是有源蜂鸣器,所以电路同样采用了一个NPN的三极管S8050来驱动。
2.2 提高项目设计思路
我们的提高项目选的是下位机与上位机通信,由于我们下载程序时已经焊接好了串口电路,所以提高项目的设计就不需要电路。
3 原理图
3.1 基础项目原理图
原理图我们使用Altium Designer 绘画,基础项目原理图如图3-1所示:

图3-1 基础项目原理图
4 需要器件清单
表4‐1 最小系统所需器件清单
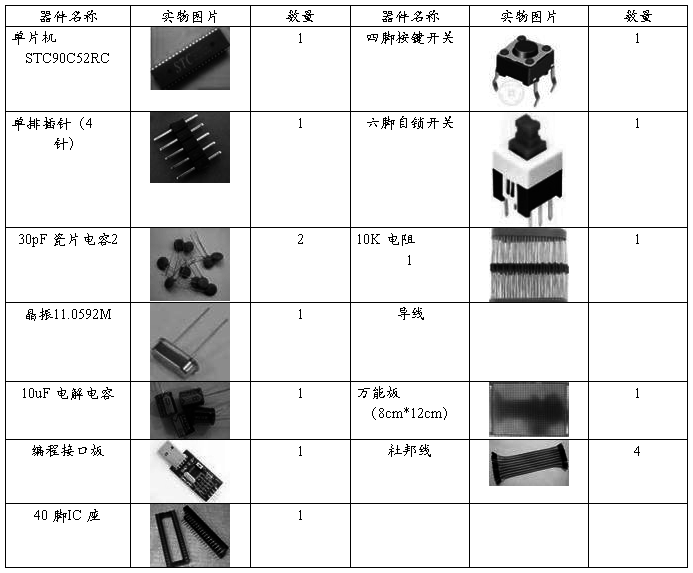
表4‐2 简单外围电路所需器件清单

5 PCB图
以下是我们画的PCB图,如图5-1所示:由于我们是使用的洞洞板焊接电路,所以我们画的PCB布局也是对应9×15的洞洞板来设计和布线的。

图5-1 基础项目PCB
6 程序流程图
6.1 基础项目流程图
首先由流水灯、蜂鸣器、按键的检测、数码管显示如果都放在主函数里一直循环的话,势必会互相影响,所以我在设计的时候采用的思路是在定时器里进行跑马灯,蜂鸣器的鸣叫,在主函数里一直调用数码管显示函数,按键采用中断的方式,这样的互相就不干扰。假如定时器的定时时间为1s,即1s为基准。在第一秒的时候让第一个灯亮,第二秒的时候让第二个灯亮....,当到第九秒的时候判断时模式一还是模式二,再把相对应的灯的数据赋值个P1口,之后在模式一的时候当时间记到16S的时候,这时候清零计数,这样就形成了循环,同样对于模式二的时候当计到14的时候,这时候清零,这样也形成循环。这样就实现跑马灯的要求,周期也容易更改。播放和暂停的实现使用在外部中断里用一个变量进行计数,当计数为1时我们规定为暂停,计数为2时我们规定为播放,同时把计数清零以便形成循环。模式的操作同样也是采用这样的方法。在定时器里时间基准加一只有在播放模式下才加一,这样就实现了灯和数码管显示的暂停与播放。基础项目流程图如图6-1所示:

图6-1 基础项目流程图
6.2 提高项目流程图
上位机之间通信,我们采用双机通信方式,上位机给下位机发送的数据是不定长度的,且没指令后都加上帧尾ok。我么假设上位机给下位机发送的指令有:wok、wcok、wcyok。当下位机接收到wok时我们让第一个LED灯亮,并返回给上位机Command_wok;接收到wcok时第二个灯亮,并返回给上位机Command_wcok;接收到wcyok指令时让第三个灯亮, 并返回给上位机Command_wcyok。提高项目的流程图如图6-2所示:
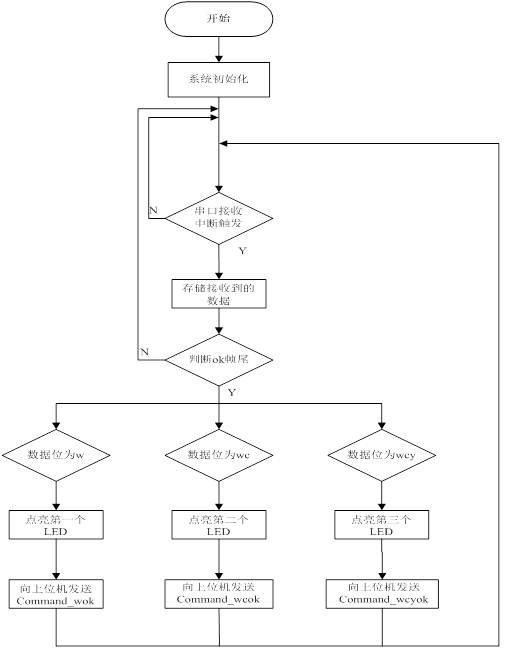
图6-2 提高项目程序流程图
7 编写的上位机界面
我们使用了VB编写了生产实习调试通信的上位机,界面如图7-1所示:

图7-1 上位机界面
8 程序代码
8.1 基础项目的代码
#include<reg52.h>
#define uint8_t unsigned char
#define uint16_t unsigned int
#define BeerOn beer = 1//打开蜂鸣器
#define BeerOff beer = 0//关闭蜂鸣器
sbit wei1 = P2^6;//数码管的个位控制端
sbit wei2 = P2^7;//数码管的十位控制端
sbit beer = P2^5;//蜂鸣器的控制端
sbit Rest = P2^0;//软件复位控制端
void delay(uint16_t DelayTime);//简单的延时函数
void display(uint8_t dis_data);//数码管显示函数 显示0~99
void Timer0Intial(void);//定时器0初始化
void EXT0_Intial(void);//外部中断0初始化
void EXT1_Intial(void);//外部中断1初始化
uint8_t count=0,TimeCount=0;//定时器基准计数变量
uint8_t Mode =2,ModeCount=0;//初始化为模式2左右循环
uint8_t PausePlay=1,PausePlayCount=0;//初始为播放模式
uint8_t Period=0;//计数周期
uint8_t BeerOpenFlag = 1;
uint8_t duanma[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//显示0-9
uint8_t LedData[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//LED查表数据
void main(void)//主函数
{
beer=0;//关闭蜂鸣器
EXT0_Intial();//外部中断0初始化
EXT1_Intial();//外部中断1初始化
Timer0Intial();//定时器0初始化
while(1)
{
display(Period);//显示循环的周期
if(Rest==0)
{
delay(2);
if(Rest==0)
{
while(!Rest);
Mode =2;
TimeCount=0;
Period=0;
P1 = 0xff;
}
}
}
}
void delay(uint16_t DelayTime)//简单的延时函数
{
uint8_t i=0;
while(DelayTime--)
{
for(i=0;i<250;i++);
}
}
void display(uint8_t dis_data)//2位数码管显示函数
{
P0 = duanma[dis_data/10];
wei2=1;//显示十位的数据
wei1=0;
delay(1);
P0 = duanma[dis_data%10];
wei2=0;//显示个位
wei1=1;
delay(1);
}
void Timer0Intial(void)//定时器0初始化
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
ET0=1;
EA=1;
TR0=1;
}
void EXT0_Intial(void)//外部中断0初始化
{
IT0=1;//下降沿触发
EX0=1;//外部中断允许位
PX0 = 1;//外部中断0为高优先级
PX1 = 1;//外部中断1为高优先级
PT0 = 0;//定时器0为低优先级
}
void EXT1_Intial(void)//外部中断1初始化 模式选择
{
IT1=1;//下降沿触发
EX1=1;//外部中断允许位
}
void Timer0() interrupt 1//定时器0中断服务程序 50ms
{
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
count++;
if(count>20)//LED 扫描的速度 500ms
{
count = 0;
if(PausePlay ==1)//只有在播放模式才工作
{
TimeCount ++; //200ms 定时基准
//Period++;
}
if(Period>99) //当周期大于99时清零
{
Period = 0;
}
if(TimeCount ==1)//第一个LED亮
{
if(BeerOpenFlag)
BeerOn; //打开蜂鸣器
}
if(TimeCount == 2)//第二个200ms时 关闭蜂鸣器
BeerOff;
if(TimeCount < 9)
{
P1=LedData[TimeCount-1];
}
else
{
if(Mode==1) //模式一单方向循环
{
P1=LedData[TimeCount-9];//赋LED数据
if(TimeCount ==9)//第一个LED亮
{
if(BeerOpenFlag)
BeerOn;
}
if(TimeCount == 10)
BeerOff;
}
if(Mode==2) //模式二 双向循环
{
P1=LedData[15-TimeCount];//赋LED控制数据
}
if(Mode == 1)//模式1周期为16
{
if(TimeCount > 15) //当定时器基准计数到16时清零计数
TimeCount =0;
}
if(Mode == 2)//模式2周期为14
{
if(TimeCount > 13)
TimeCount =0;
}
}
}
}
void EXT0()interrupt 0//外部中断0中断服务程序 暂停播放控制
{
PausePlayCount++;
if(PausePlayCount==1)//第一次按键
{
PausePlay = 0;//Pause
BeerOff;
}
if(PausePlayCount > 1)//第二次按键
{
PausePlay = 1;//Play
PausePlayCount =0;
}
}
void EXT1()interrupt 2//外部中断1中断服务程序
{
ModeCount++;
if(ModeCount==1) //第一次按键 模式一
{
Mode = 1;
TimeCount = Period % 8;//模式切换Led同时也切换
if(TimeCount == 1)//模式切换时不让蜂鸣器误判
BeerOpenFlag = 0;
else
BeerOpenFlag = 1;
}
if(ModeCount > 1) //第二次按键 模式二
{
Mode = 2;
ModeCount = 0;//清零按键计数
TimeCount = Period % 14;//模式切换Led同时也切换
if(TimeCount == 1)//模式切换时不让蜂鸣器误判
BeerOpenFlag = 0;
else
BeerOpenFlag = 1;
}
}
8.2 提高项目的代码
#include<reg52.h>
#define uint8_t unsigned char
#define uint16_t unsigned int
sbit beer = P2^5;
void UART_Intial(void);//串口初始化
void UART_Send_char(uint8_t SendData);//串口发送字节函数
void UART_Send_string(uint8_t *StringData);//串口发送字符串函数
uint8_t LedData[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//LED查表数据
uint8_t rbuff[10],rcount=0,receive_ok=0;
void main(void)//主函数
{
P1=0xff;
beer =0;
UART_Intial();
UART_Send_string("****MCU and PC Connect Ok****");
while(1)
{
if(receive_ok==1)
{
if(rbuff[rcount-3]=='w')
{
P1 = LedData[0];////点亮第一个led
UART_Send_string(" Command_wok ");//返回上位机com1 ok
rcount =0;
receive_ok=0;
}
if((rbuff[rcount-4]=='w')&&(rbuff[rcount-3]=='c'))
{
P1 = LedData[1];//点亮第二个led
UART_Send_string(" Command_wcok ");////返回上位机com2 ok
rcount =0;
receive_ok=0;
}
if((rbuff[rcount-5]=='w')&&(rbuff[rcount-4]=='c')&&(rbuff[rcount-3]=='y'))
{
P1 = LedData[2];//点亮第三个led
UART_Send_string(" Command_wcyok ");//返回上位机com3 ok
rcount =0;
receive_ok=0;
}
rcount =0;
receive_ok=0;
}
}
}
void UART_Intial(void)//串口初始化
{
TMOD=0x20;//定时器0为方式2自动重装
TH1=0xfd;//前提晶振是11.0592mhz
TL1=0xfd;
EA=1;
ES=1;//串口中断允许位
TR1=1;
REN=1;//串口接受端
SM0=0;//串口通信方式为8位异步通信
SM1=1;
}
void UART_Send_char(uint8_t SendData)//串口发送字节函数
{
SBUF = SendData;
while(!TI);
TI = 0;
}
void UART_Send_string(uint8_t *StringData)//串口发送字符串函数
{
while(*StringData)
{
UART_Send_char(*StringData);
StringData++;
}
}
void UART()interrupt 4//串口接收中断函数
{
// ES = 0;
if(RI)
{
rbuff[rcount++]=SBUF;//存储上位机发送的数据
RI = 0;//清中断标志位
}
if((rbuff[rcount-1]=='k')&&(rbuff[rcount-2]=='o'))//判断帧尾是不是ok
{
receive_ok=1;//接受完成
}
if(rcount>5)
{
rcount =0;
receive_ok=0;
}
// ES = 1;
}
9 心得体会
通过两周的单片机的生产实习,从单片机最小系统的焊接,到数码管、跑马灯、蜂鸣器电路的焊接,最后到编写程序、下载、调试。程序的编写相对来说是最难的,因为所有的模块要同时工作,最后我们选择了用定时器提供时间片段的编程思想进行编写程序,逐个模块的调试,最后实现了老师要求的功能。提高项目我们选择与上位机的串口通信,硬件电路我们需要另外焊接,老师要求上位机发给下位机的指令是不定长度的,这样的编程难度加大了很多,我才采用的通信协议是数据位+帧尾的模式,通过我们不懈的尝试最后实现了要求,另外我们还编写了我们自己使用的上位机调试上位机。这两周的学习我们学会了Altium Designer软件画原理图和PCB,学会了单片机的编程,以及VB上位机的编写。我相信这些实训将是我们走上工作岗位前的很好的历练,我们会再接再厉,进一步学习相关的专业知识。
10 参考文献
[1] 张美金,刘卉,谢国民.80C51单片机微机原理.辽宁人民出版社,2008:79~196.
[2] 谭浩强.C程序设计(第四版).清华大学出版社,2010:130~270
[3] 刘炳文.Visual Basic程序设计教程(第四版).清华大学出版社,2009:81~189
[4] 童诗白,华成英.模拟电子技术基础(第四版).高等教育出版社,2011:28~110
[5] 阎石.数字电子技术基础(第五版).高等教育出版社,2011:1~50
- 单片机生产实习报告
-
燕山大学单片机生产实习报告
燕山大学单片机生产实习报告一、生产实习的目的和意义:生产实习是培养本科学生理论联系实际,提高实际动手操作能力的重要教学环节。本专业…
-
51单片机生产实习报告
学号10780220实习报告生产实习起止日期20xx年6月24日至20xx年7月19日学班成生姓名岳维启级电子信息科学与技术2班绩…
-
单片机生产实习报告
学号实习报告生产实习起止日期20xx年6月24日至20xx年7月19日学班成生姓名级绩10电信科1班指导教师签字计算机与信息工程学…
-
单片机生产实习报告
生产实习班级姓名学号成绩电子与信息工程学院信息与通信工程系目录1设计任务111基础项目1111单片机最小系统1112简单外围电路制…
-
关于单片机的电子工艺实习报告
电子工艺实习总结报告姓专班学名业机械电子工程级机电102号指导教师成一实习目的与要求绩1切实培养单片机应用系统的实践设计开发能力采…
-
单片机实训报告
桂林电子科技大学职业技术学院单片机实训报告红外遥控学院系电子信息工程系专业电子信息工程技术学号1212220xx7学生姓名李建军指…
-
单片机实训报告
目录一概述11设计制作产品的背景目的意义12设计制作产品的设计要求13分工情况工作计划及本人所总结工作14本课题的基本内容重点及难…
-
单片机实习报告
温度控制系统设计目名院业级号导教师基于51单片机的温度控制系统设计王金辉王涌工学院自动化自动化919xxxxxxxxxxxx910…
-
“51”单片机实习报告
51姓名单片机实习报告学院电气与控制工程学院专业班级学号目录一前言二实训的目的及要求三实训原理四硬件的安装与调试五软件部分六系统测…