自动控制原理课程设计报告
《自动控制原理》课程设计
指导教师:时国平孙佐
20##年5月
目录
1、课程教学目的…………………………………………………3
2、课程设计内容及基本要求……………………………………3
2.1、课程设计内容………………………………………………………3
2.2、设计基本要求………………………………………………………3
3、所选设计题……………………………………………………4
4、未校正系统分析………………………………………………4
4.1、绘画开闭环零极点图………………………………………………4
4.2、绘画根轨迹,并分析随根轨迹增益变化的性能…………………6
4.3、作出单位阶跃响应,并分析性能指标……………………………7
4.4、绘出开环bode图,并分析频域性能指标 ………………………9
5、选定合适的校正方案…………………………………………10
5.1、分析…………………………………………………………………11
5.2、设计串联滞后校正网络的步骤……………………………………11
5.3、参数计算……………………………………………………………11
6、判断校正装置…………………………………………………11
7、绘画模拟电路…………………………………………………12
7.1、模拟电路设计………………………………………………………12
7.2、系统的阶跃响应曲线………………………………………………14
7.3、分析采用的校正装置的效果………………………………………15
8、总结及设计心得………………………………………………15
9、参考文献………………………………………………………15
一、课程教学目的
1、培养理论联系实际的设计思想,训练综合运用经典控制理论和相关课程知识的能力。
2、掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
3、学会使用MATLAB语言及Simulink动态仿真工具进行系统仿真与调试。
4、学会使用硬件仿真软件对系统进行模拟仿真。
5、锻炼独立思考和动手解决控制系统实际问题的能力。
二、课程设计内容及基本要求
1、课程设计内容
(1)、给出有实际背景的数学模型,分别提出不同的设计题目及设计指标要求。学生通过查阅相关资料,根据各自题目确定合理的控制方式及校正形式,完成设计。
(2)、学生首先要根据所学自动控制原理课程知识(时域分析法、频率法和根轨迹法)对系统进行性能分析。根据设计题目要求进行人工设计校正装置,初步设计出校正装置传递函数形式及参数。
(3)、利用MATLAB语言及simulink动态仿真工具,在计算机上对人工设计系统进行仿真调试,使其满足技术要求,并绘制打印出仿真框图、频率特性图及动态响应图。
(4)、确定校正装置的电路形式及电路参数。
(5)、完成设计报告。
2、设计基本要求
(1)、掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析。
(2)、根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
(3)、利用MATLAB语言及simulink动态仿真工具,在计算机上对人工设计系统进行仿真调试,使其满足技术要求,并绘制打印出仿真框图、频率特性图及动态响应图。
(4)、确定校正装置的电路形式及电路参数。
(5)、使用multsim电路设计仿真软件绘画模拟电路。分析采用的校正装置的效果。
三、所选设计题
系统的开环传递函数为: ,设计一个PID校正环节,要求系统为:
,设计一个PID校正环节,要求系统为:
(1)系统响应斜坡信号r(t)=t时,稳态误差小于等于0.01;
(2)系统的相角裕度 。
。
四、未校正系统分析
1、利用MATLAB绘画未校正系统的开环和闭环零极点图。
由稳态误差小于等于0.01 即1/k<=0.01 解得k>=100 所以选择k=100
M语句如下:
num=100;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
Gf= feedback(G,1,-1); %生成闭环传递函数
figure(1)
pzmap(G);
title('未校正系统的开环零极点分布图')
xlabel('实轴x')
ylabel('虚轴j')
figure(2)
pzmap(Gf);
title('未校正系统的闭环零极点分布图')
xlabel('实轴x')
ylabel('虚轴j')
由软件Matlab绘画系统零极点图:
未校正系统开环零极点图:

未校正系统闭环零极点图:

2、绘画根轨迹,分析未校正系统随着根轨迹增益变化的性能(稳定性、快速性)。
①M语句如下:
num=10;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
figure(3)
rlocus(G);
title('未校正系统的根轨迹图')
xlabel('实轴x')
ylabel('虚轴j')
②M语句如下:
num=100;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
figure(3)
rlocus(G);
title('未校正系统的根轨迹图')
xlabel('实轴x')
ylabel('虚轴j')
(1)、绘画根轨迹
未校正系统根轨迹图(k=10):

未校正系统根轨迹图(k=100):
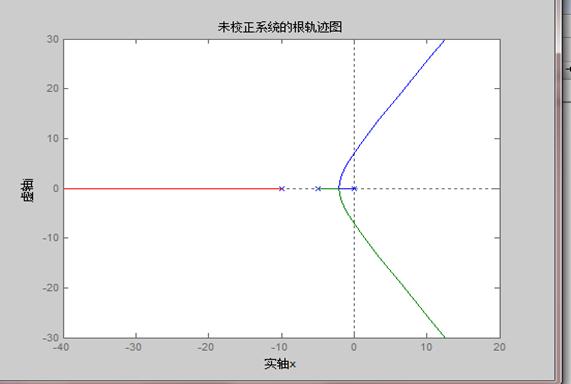
(2)、根据根轨迹分析未校正系统稳定性和快速性
①、系统稳定性分析
分析:闭环传递函数的特征方程:D(s)=0.02s^3+0.3s^2+s+k
列出劳斯表:

由劳斯稳定判据有: k>0 且 0.3-0.02k>0 ,
即0<k<15时系统处于稳定状态;
又K=100>15,所以系统不稳定
②、系统快速性分析
系统的快速性要好,则闭环极点均应远离虚轴y,以便使阶跃响应中的每个分量都衰减得更快。由系统的根轨迹图可知,当系统根轨迹在s左半平面时,闭环极点距s平面上虚轴越近,阻尼角增加,ξ变小,振荡程度加剧,超调量变大,若特征根进一步靠近虚轴,衰减振荡过程变得很缓慢,系统的快速性减小。
3、编写M文件作出单位阶跃输入下的系统响应,分析系统单位阶跃响应的性能指标。
①未校正系统单位阶跃响应
M语句如下:
num=100;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
Gf= feedback(G,1,-1); %生成闭环传递函数
sys=feedback(Gf,1);
t=0:0.01:5;
step(sys,t);
xlabel('t')
ylabel('Gf')
title('未校正系统的阶跃响应曲线')
未校正系统单位阶跃响应图:
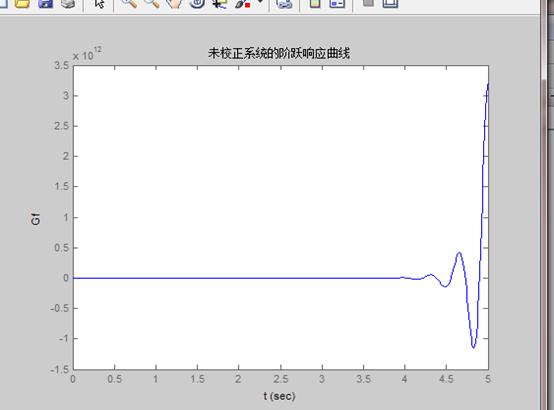
分析系统单位阶跃响应的性能指标:
由图可知,未校正系统是离散的,所以不能进行系统单位阶跃响应的性能指标
分析。
②已校正系统单位阶跃响应
M语句如下:
num=100;
den=conv([0.1 1 0],[0.2 1]);
Gs=tf(num,den);
num1=[3.7 1];
den1=[115.74 1];
Gs1=tf(num1,den1);
Gs2=series(Gs,Gs1);
sys=feedback(Gs2,1);
t=0:0.01:5;
step(sys,t);
title('已校正系统的阶跃响应曲线')
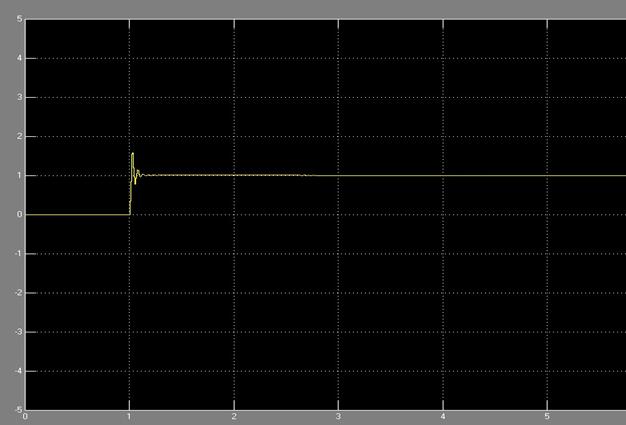
已校正系统单位阶跃响应图:
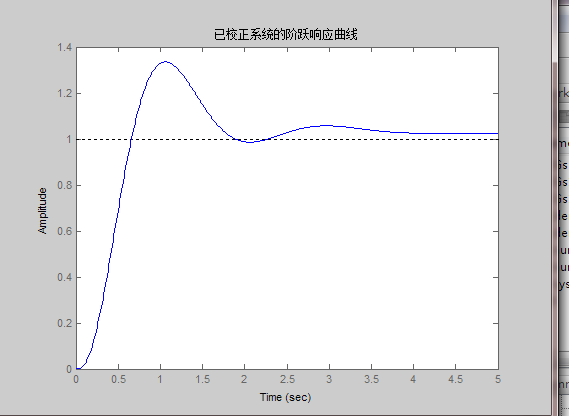
分析系统单位阶跃响应的性能指标:
由上图可知:
峰值时间tp=1.06s;
调节时间ts=3.06s;
超调量=[y(tp)—y(∞)]/y(∞)×100% =34%
且采用校正装置后系统稳定,其峰值时间和调节时间相对较小,系统反应速度较快,超调量为34%,系统的阻尼程度适中。
4、绘出系统开环传函的bode图,利用频域分析方法分析系统的频域性能指标(相角裕度和幅值裕度,开环振幅)。
M语句如下:
num=100;
den=conv([0.1 1 0],[0.2 1]);
Gs=tf(num,den);
bode(Gs);
margin(Gs);
title('系统开环传函的bode图')
未校正系统bode图:
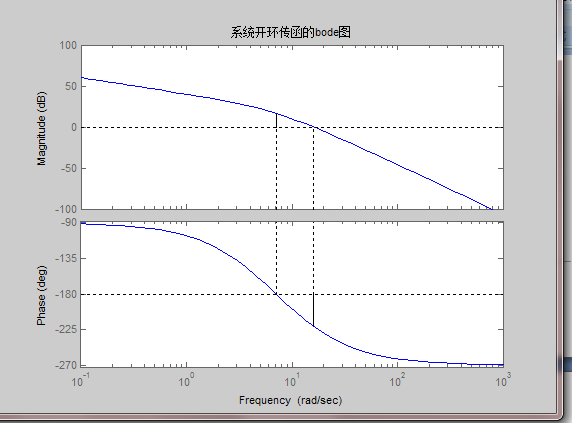
利用频域分析方法分析系统的频域性能指标:
由图可得:校正后幅值裕量Gm= 16.5dB; 相位穿越频率wg=7.07rad/s ; 相位裕量Pm=-40.4 ° ; 幅值穿越频率wc=15.9 rad/s;开环振幅 h=60.2dB。
由此可知相位裕量Pm=-40.4 °< 40 ° 故系统不稳定。
利用频域分析方法计算:
截止频率wc的计算
|A(w)|=100/√[0.09*w^4+w^2*(1-0.02w^2)^2]=1 有wc=16 rad/s
穿越频率wg的计算
G(w)=-90-arctan0.1w-arctan0.2w 令G(w)=-180 有wg=7 rad/s
幅值裕度h的计算
h=1/|A(wg)| 有h=0.147<1
相角裕度r的计算
r=180+G(wc) 有r=-40.46<0
虽然理论值跟仿真的值基本一致,但系统不稳定,故需要加入校正环节改善系统的系统特性。
五、选定合适的校正方案
选定合适的校正方案(串联滞后/串联超前/串联滞后-超前),理论分析并计算校正环节的参数,并确定何种装置实现。
1、分析:
由于未校正系统不稳定,且截止频率较大。在这种情况下,采用串联超前校正是无效的。可以证明,用超前校正k取到100时,系统的相角裕度也不到30度,而截止频率却增加至16rad/s。
而本校正对校正后的系统的动态和静态性能(响应速度、相位裕度和稳态误差)不完全有较高要求,且本校正若用串联滞后-超前校正会使校正系统复杂,故不需要用串联滞后-超前校正装置。
对系统稳态精度要求较高,响应速度要求不高,而抗干扰性能要求较高的场合;未校正系统有满意的动态性,而稳态性能不满足要求,可用串联滞后网络来提高稳态精度,同时保持其动态特性基本不变。
故选用串联滞后校正,就可以满足需要的性能指标。
(具体参考自动控制原理 简明教程(第二版)6.3节)
2、设计串联滞后校正网络的步骤如下:
1、根据稳态误差要求,确定开环增益K=100;
2、利用已确定的开环增益,绘制未校正系统的对数频率特性 ,确定截止频率wc’、相角裕度r和幅值裕度h;
3、选择不同的wc”,计算或查出不同的r,在伯德图上绘制r(wc”) 曲线;
4、根据相角裕度r”要求,选择已校正系统的截止频率wc”;考虑滞后网络在 wc” 处会产生一定的相角滞后Ψc(wc”),因此r”= r(wc”)+Ψc(wc”);
5、确定滞后网络参数b和T:20logb+L’(wc”)=0 1/bT=(0.1-0.25) wc”;
6、校验系统的性能指标。
3、参数计算:
由r’=r-6°, r为要求的40 有r’=46°
又r’(wc)=46° 得wc=2.7 rad/s
L(wc)=29.9 20lgb+ L(wc)=0 得b=0.032
1/bT=0.1wc 得T=115.74s
故校正装置的传递函数为G’=
六、判断校正装置
绘画已校正系统的bode图,与未校正系统的bode图比较,判断校正装置是否符合性能指标要求,分析出现大误差的原因。
M语句如下:
num=100;
den=conv([0.1 1 0],[0.2 1]);
Gs=tf(num,den);
num1=[3.7 1];
den1=[115.74 1];
Gs1=tf(num1,den1);
Gs2=series(Gs,Gs1);
bode(Gs,'b-' ,Gs2,'g-');
未校正、已校正系统的bode图:
未校正bode图的曲线:上线
已校正bode图的曲线:下线

判断校正装置是否符合性能指标要求:
由上图可知校正后的相角裕度r’=40.304° 40°,所以选用的校正环节符合要求。
40°,所以选用的校正环节符合要求。
七、绘画模拟电路
根据选用的装置,使用cmultisim电路设计仿真软件(或其他硬件电路仿真软件)绘画模拟电路。求此系统的阶跃响应曲线。分析采用的校正装置的效果。
1、模拟电路设计:
(1)、未校正的模拟电路 G(s)= :
:
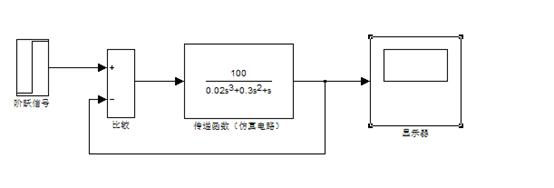
未校正电路图:
(2)、已校正的模拟电路 G(s)= :
:

2、系统的阶跃响应曲线
未校正的阶跃响应曲线:
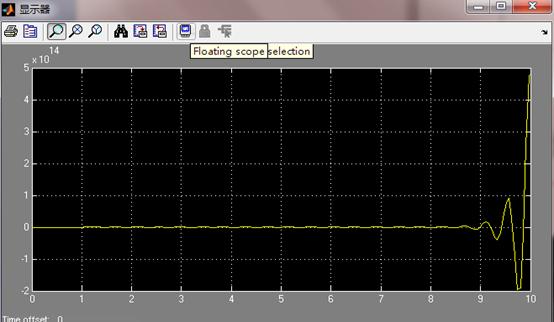
校正后的阶跃响应曲线:

3、分析采用的校正装置的效果
由系统的阶跃响应曲线(未校正的阶跃响应曲线、校正后的阶跃响应曲线)可知,采用的串联滞后校正装置的效果明显,使校正后的系统得到要求且系统稳定。
八、总结及设计心得
通过这次的课程设计,再次熟悉我们所学的理论知识,同时为将理论知识运用于实际搭建了一个很好的平台;使课堂学习的理论知识联系实际,进一步掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,同时也学会使用MATLAB语言及Simulink动态仿真工具进行系统仿真与调试。
在这次课程设计过程中,遇到一些麻烦。如对某些概念印象模糊;软件的开发运用不熟悉。但通过复习书本和向同学请教来了解模糊了的概念以及其他不懂得问题;借阅基本软件指导书籍,借鉴里面的例子快速的掌握此软件的使用方法。
从课程设计的入手到最后分析,对于我们来说是个不小的挑战,要清楚的注意到每个细节是不可行的,所以遇到问题时和班上的同学一起讨论,是解决各种难题的有效方法。这次课程设计使我深深地体会团队精神的重要性。
通过这次课程设计使我懂得了理论与实际相结合是很重要的,仅有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。在设计过程中遇到的问题很多,但这是难免的,只有发现了自己的不足之处并加以改正就可以达到我们需要的要求,不断进步。
九、参考文献
1、自动控制原理(第二版) 胡寿松 科学出版社
2、自动控制原理实验教程(硬件模拟与matlab仿真)熊晓君 机械工业出版社
3、MATLAB电子仿真与应用教程 王华 国防工业出版社
4、MATLAB程序设计教程 刘卫国 中国水利水电出版社
楼顺天.基于MATLAB的系统分析与设计.西安电子科技大学出版社.1999年
5、MATLAB入门与提高 龚剑 清华大学出版社
6、百度文库
7、 http://matlab.net.cn/Index.html
第二篇:《自动控制原理》课程设计报告书
二○一二~二○一三学年第 一 学期
信息科学与工程学院
课程设计报告书
课程名称: 自动控制原理课程设计
班 级: 自动化2010级 3班
学 号: 201004134102
姓 名: 黄金龙
指导教师: 柴利
20##年1月
一.需求分析
1.设计题目
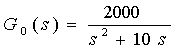
已知单位负反馈系统被控制对象的开环传递函数

用串联校正的频率域方法对系统进行串联校正设计。
2.设计要求及系统功能分析
任务一:用串联校正的频率域方法对系统进行串联校正设计,使闭环系统同时满足如下动态及静态性能指标:
(1)在单位斜坡信号 作用下,系统的稳态误差
作用下,系统的稳态误差 ;
;
(2)系统校正后,相位裕量
(3)系统校正后,幅值穿越频率
任务二:若采用数字控制器来实现任务一设计的控制器,给出数字控制器的差分方程表示或离散传递函数(Z变换)表示。仿真验证采用数字控制器后闭环系统的性能,试通过仿真确定满足任务一指标的最大的采样周期T. (注:T结果不唯一)。
二.校正前系统性能分析
校正前系统的开环传递函数为
由设计要求(1) ,得
,得 ,故有
,故有
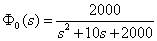
从而系统的开环传递函数为
系统的闭环传递函数为
系统的闭环单位斜坡响应的拉氏变换为

即对 的斜坡响应对应于对
的斜坡响应对应于对 的阶跃响应。
的阶跃响应。
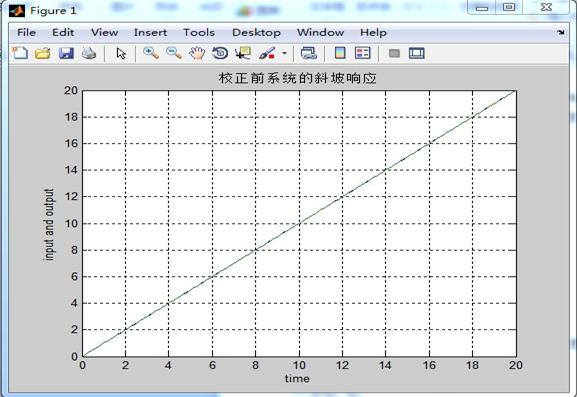
系统的时域性能
(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page102)
%%系统未校正前闭环单位斜坡响应
num=[2000];
den=[1,10,2000,0];
t=[0:0.1:20];
y=step(num,den,t);
plot(t,t,t,y);
grid;
xlabel('time');
ylabel('input and output');
title('校正前系统的斜坡响应');
系统的频域性能
(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page208)
%%系统未校正前伯德图
num=[200];
den=[0.1 1 0];
sys=tf(num,den);
w=logspace(-1,4,100)
bode(h,w);
grid;
[Gm,pm,wcp,wcg]=margin(sys);
Gmdb=20*log10(Gm);
[Gmdb,pm,wcp,wcg]

得到系统的稳态裕度:增益裕度gm、相位裕度pm、相角穿越频率wcg、幅值穿越频率wcp

由结果知:相位裕度
幅值穿越频率
不符合系统的性能指标要求,因此需要进行校正,根据题目要求,采用串联超前校正。
三.参数计算及校正环节设计
根据题目要求及未校正系统的性能分析知,可以用串联超前校正,具体设计步骤如下(此部分内容参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page229)
(1)根据给定的系统稳态性能指标,确定系统开环增益K=200;
(2)绘制在确定的K值下系统的伯德图,并计算其相角裕度 ;
;
(3)根据给定的相角裕度,计算所需要的相角超前量 ,即
,即  ,式中
,式中 ,从而
,从而 ;
;
(4)令超前校正装置的最大超前角 ,按下式计算网络的系数
,按下式计算网络的系数 值:
值: 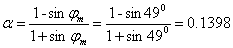
(5)将校正网络在 处的增益定为
处的增益定为 ,同时确定未校正系统伯德曲线上增益为
,同时确定未校正系统伯德曲线上增益为 处的频率,该频率即为校正后系统的剪切频率
处的频率,该频率即为校正后系统的剪切频率 ;
;
计算如下:
未校正系统的剪切频率为 ,由上述可知
,由上述可知
 或
或 
于是 
(6)确定超前校正装置的交接频率


(7)画出校正后系统的伯德图,进行相关验算
经过超前校正后,系统开环传递函数为
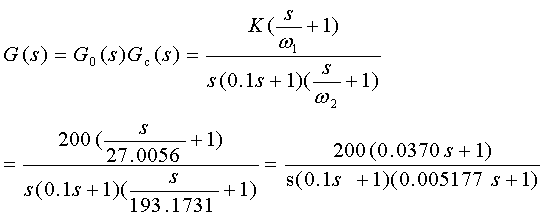
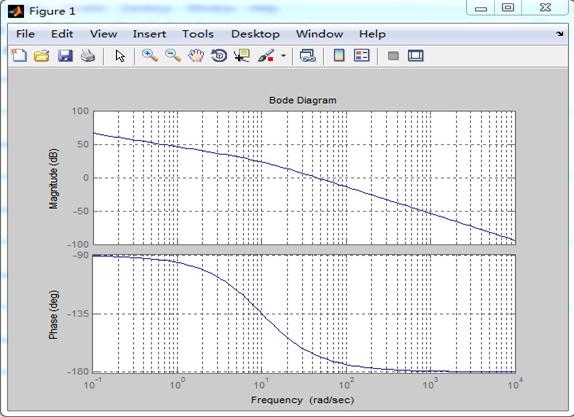
校正后系统的伯德图(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page208)
%%系统校正后伯德图
num=[7.4059 200];
den=conv([0.1 1 0],[0.005177 1]);
sys=tf(num,den);
w=logspace(-1,4,100)
bode(h,w);
grid;
[Gm,pm,wcp,wcg]=margin(sys);
Gmdb=20*log10(Gm);
[Gmdb,pm,wcp,wcg]
得到系统的稳态裕度:增益裕度gm、相位裕度pm、相角穿越频率wcg、幅值穿越频率wcp

由结果知:相位裕度
幅值穿越频率
满足性能指标,故校正可行。
四.利用MATLAB进行仿真检验
(此部分内容参见《MATLAB实用教程(第2版)》(郑阿奇主编)第七章)
1.校正前
(1)系统结构
(2)系统单位阶跃响应
2.校正后
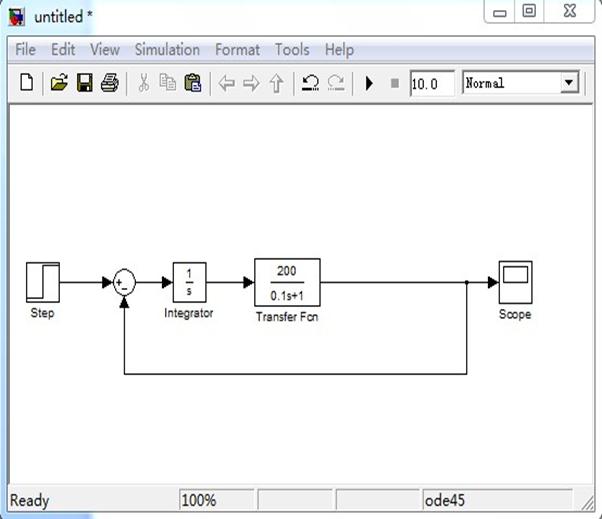
(1)系统结构
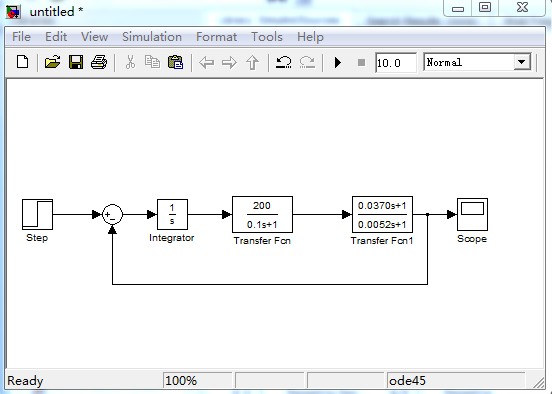
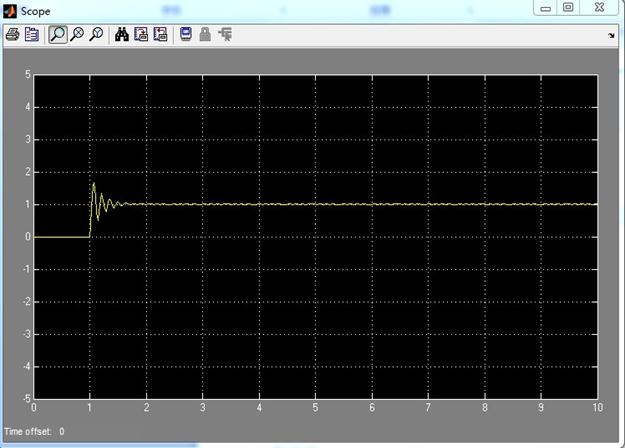
(2)系统单位阶跃响应
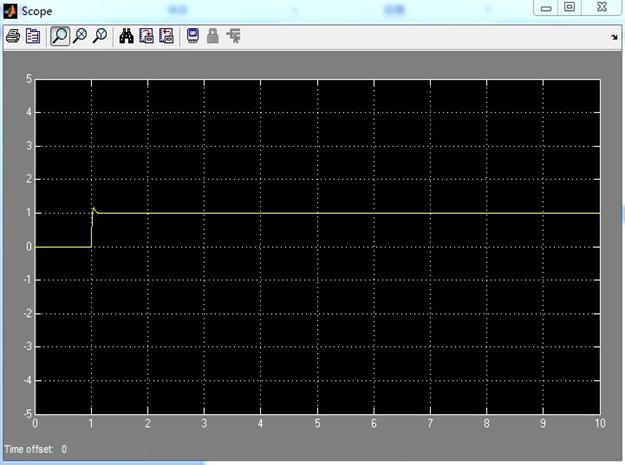
由校正前后系统的单位阶跃响应曲线可知,当加入串联超前校正环节后,系统的稳态性能和暂态性能均得到提升,校正成功。
五.数字控制器
(此部分内容参见《MATLAB实用教程(第2版)》(郑阿奇主编)第六章)
1.第一次尝试
(1)任务一设计的控制器为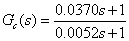 ,利用MATLAB中零阶保持器法求出该控制器的Z变换。一般设置采样周期为最小时间常数的
,利用MATLAB中零阶保持器法求出该控制器的Z变换。一般设置采样周期为最小时间常数的 ,故采样周期为
,故采样周期为 。
。
%%求解控制器的Z变换
num=[0.0370 1];
den=[0.0052 1];
G=tf(num,den);
Gd=c2d(G,0.01)
命令窗口得到变换后的结果
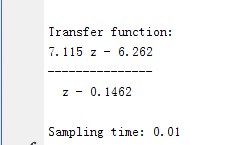
得该控制器的Z变换为 ;
;
(2)同理得到未校正系统传递函数的Z变换:
%%求解未校正系统积分环节Z变换
num=[1];
den=[1 0];
G1=tf(num,den);
Gd1=c2d(G1,0.01)
结果如下:
%%求解未校正系统惯性环节Z变换
num=[200];
den=[0.1 1];
G2=tf(num,den);
Gd2=c2d(G2,0.01)
结果如下:
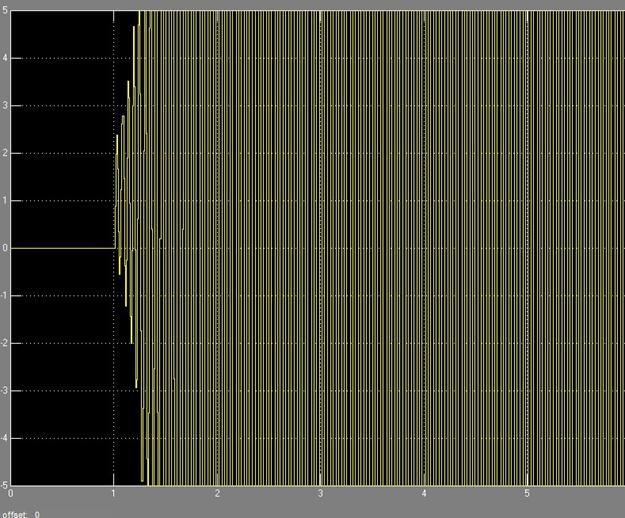
(3)校正后进行离散仿真
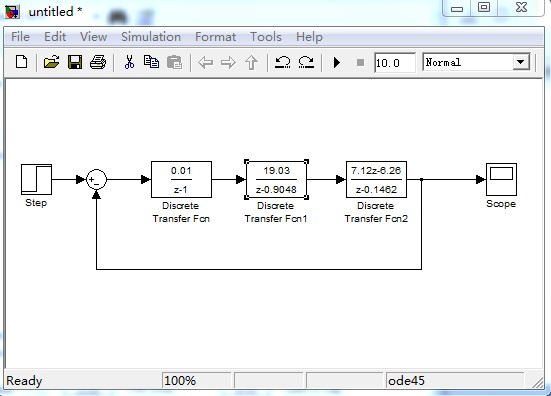
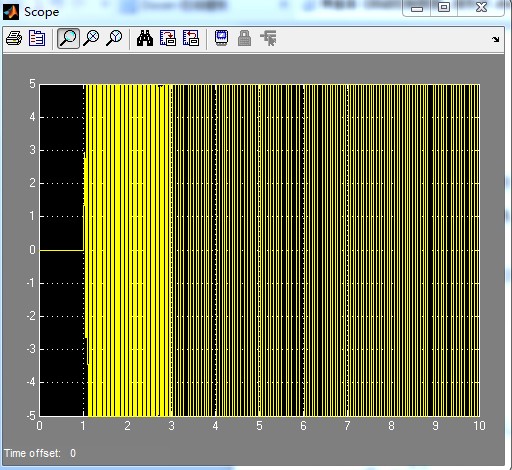
由图可知,采样周期过大。
 2.第二次尝试
2.第二次尝试
同第一次尝试,此次将积分环节、惯性环节、校正环节的采样周期均设置为 ,由此得:
,由此得:
积分环节 惯性环节
惯性环节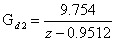 校正环节
校正环节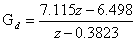
成功。由第一次和第二次尝试可知,采样周期可能在0.005s~0.01s之间。
3.第三次尝试
令 ,重复以上步骤
,重复以上步骤
积分环节 惯性环节
惯性环节 校正环节
校正环节
仿真结果如下:
失败,由第二次和第三次尝试可知,采样周期可能在0.005s~0.008s之间。
4.第四次尝试
令 ,同上
,同上
积分环节 惯性环节
惯性环节 校正环节
校正环节
仿真结果如下:
成功,由上几次尝试可知,最大采样时间应在0.006s~0.008s之间。
5.第五次尝试
令 ,同上
,同上
积分环节 惯性环节
惯性环节 校正环节
校正环节
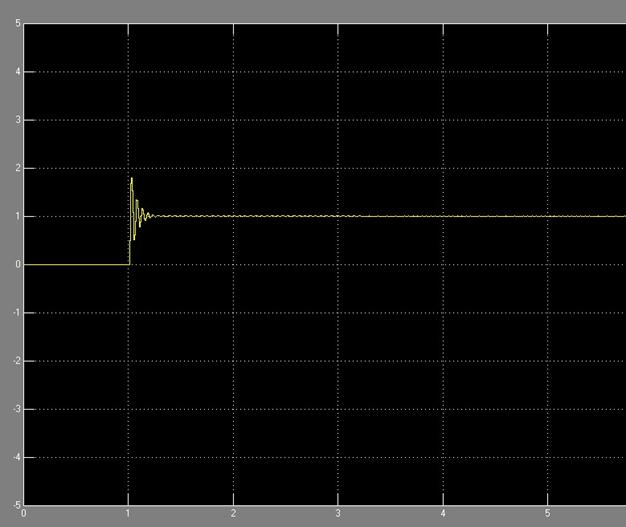
仿真结果如下:
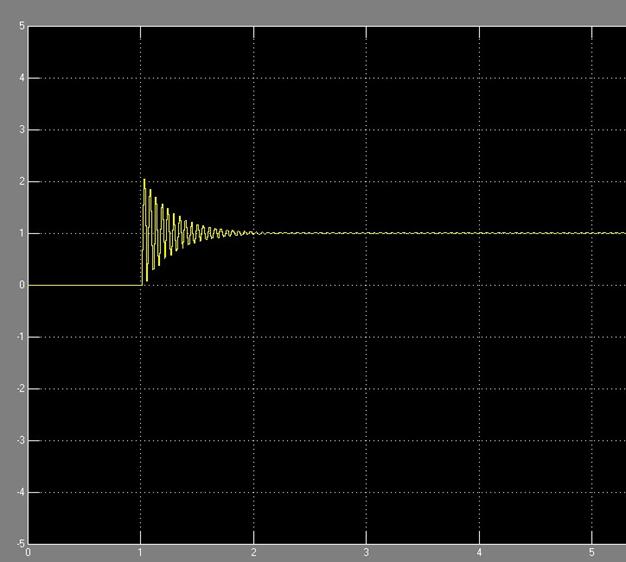
由以上尝试可知,最大采样周期约为0.007s.
结论:校正后最大采样周期近似为
六.参考文献
1.吴怀宇、廖家平《自动控制原理(第二版)》华中科技大学出版社
2.郑阿奇《MATLAB实用教程(第2版)》电子工业出版社
3.胡寿松《自动控制原理》科学出版社
七.心得体会
此次课程设计花费了自己很长的时间去做,自己付出了很多的时间和精力,虽然结果不一定做得够好,但是自己在此期间确实学习到了很多的知识和技能,自我感觉收获还是蛮大的。
在设计校正装置时,由于自己对一些基本知识没有掌握牢固,导致自己在设计过程中频频出错,比如说校正后剪切频率的计算就是因为理解不透,导致自己在后面的设计过程中出错;还有由于自己MATLAB指令掌握不熟,导致自己在编写程序期间总得不到自己期望的结果
在对离散系统进行仿真求解最大采样周期时,开始时由于自己对题目的理解不是太清楚,导致自己白花费了很多时间去做和题目不相关的事。
总之,经过此次课程设计,我对《自动控制原理》的相关知识的理解及其应用又更深了一层,尤其是对《MATLAB》的强大功能有了更进一步的了解,同时也警醒自己,自己掌握的知识还远远不够,还需要自己持之以恒的努力。
最后想对柴老师说句心里话:“虽然我不是太适应您授课的风格,但我一直很欣赏也很钦佩您对学生尽职尽责的态度;虽然我成绩不好,但经过此次课程设计,我对《自动控制原理》的兴趣变浓厚了。‘经师易遇,人师难求’我想是对您最中肯的评价!”
-
自动控制原理课程设计报告
自动控制原理课程设计专业设计题目控制系统的综合设计班级自动化0943学生姓名XXX学号指导教师分院院长XXX教研室主任XX电气工程…
-
自动控制原理课程设计
课程实习报告课程名称:自动控制原理及专业软件课程实习题目名称:三阶系统分析与校正年级专业及班级:建电1001姓名:学号:指导教师:…
-
自动控制原理课程设计
金陵科技学院课程设计目录目录绪论1一课程设计的目的及题目211课程设计的目的212课程设计的题目2二课程设计的任务及要求321课程…
-
自动控制原理课程设计报告-罗杰
审定成绩自动控制原理课程设计报告题目单位负反馈系统设计校正学生姓名院别学号设计时间罗杰22班级电子081BF物理与电子学院专业电子…
-
自动控制原理设计报告
课程设计综合实验报告20xx20xx年度第1学期名称自动控制原理题目院系控制与计算机工程学院班级自动化1003班学号110119x…
-
单位负反馈系统超前校正——自动控制原理课程设计
指导教师评定成绩审定成绩重庆邮电大学自动化学院自动控制原理课程设计报告设计题目单位负反馈系统的校正设计单位二级学院自动化学院学生姓…
-
自动控制原理课程设计报告
自动控制原理课程设计专业设计题目控制系统的综合设计班级自动化0943学生姓名XXX学号指导教师分院院长XXX教研室主任XX电气工程…
-
自动控制原理课程设计第5题
清华大学自动控制原理课程设计说明书课程设计任务书学生姓名陈智专业班级自动化0801班指导教师张立炎工作单位自动化学院题目用MATL…
-
自动控制原理课程设计报告
自动控制原理课程设计专业设计题目指导教师学生姓名分院院长教研主任电气工程及其自动化二阶系统的综合设计班级学号电气工程学院一设计内容…
-
MATLAB自动控制课程设计报告
课程设计自动控制原理报告课程名称设计题目自动控制课程理论设计院系自动控制与机械工程学院班级电气一班设计者学号指导教师设计时间年月日…
-
一阶二阶自控原理实验报告
成绩北京航空航天大学自动控制原理实验报告学院自动化科学与电气工程学院专业方向班级120xx1学号120xx019学生姓名毕森森指导…