全数字摄影测量实习报告
全数字摄影测量实习报告
学号:
姓名:
班级:
专业:
课程名称: 数字摄影测量学
指导老师:
2013 年 1 月
一、目的和要求
了解全数字摄影测量的作业步骤。
二、资料及用具
1、VirtuoZo全数字摄影测量系统一套;
2、外业控制点资料一套:外业控制点成果及相对应的控制点位图
3、相机参数数据一套:应该提供相机主点理论坐标X0、Y0,相机焦距f0,框标距或框标点标
4、航片扫描数据:符合VirtuoZo图像格式及成图要求扫描分辨率的扫描影像数据。VirtuoZo可接受多种图像格式:如TIFF、BMP、JPG等。一般选TIFF格式。
三、实验步骤
⒈ 建立测区与模型的参数设置
⑴ 数据准备完善后,进入VIrtuoZo主界面,首先要新建一个测区,通过文件à打开测区,新建一个名为hammer的测区,系统默认后缀名为blk,默认保存在系统盘下的Virlog文件夹里。*.blk文件其实只是个索引文件,它最终指向的是设置测区里的测区主目录文件夹。*.blk文件建立好之后,系统会自动弹出设置测区的对话框,按照原始数据提供的信息填写相应的内容,之后保存退出。如图一所示
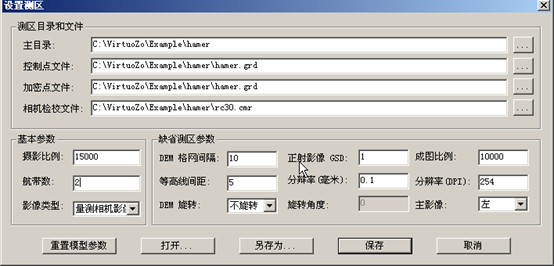
控制点文件选择:hamer.grd
加密点文件选择:hamer.grd
相机检校文件选择rm30.cmr。
摄影比例尺:1:15000。
航带数:2。
影像类型:量测相机。
⑵ 数据准备
1. 建立自己的文件夹,可选择D盘,D:\***。
2. ⑴将D:\VirtuoZo\Example\hamer\images文件夹中的下列文件拷贝到D:\xiaotaiye\images文件
夹中:①01-155_50mic.tif等6个tif影像文件,
②hamerIndex.html 和hamerIndex文件夹。注:此文件为测区分布及控制点分布文件。
⑵将D:\VirtuoZo\Example\hamer文件夹中的hamer.grd 和rc30.cmr 两个文件拷贝到D:\***。
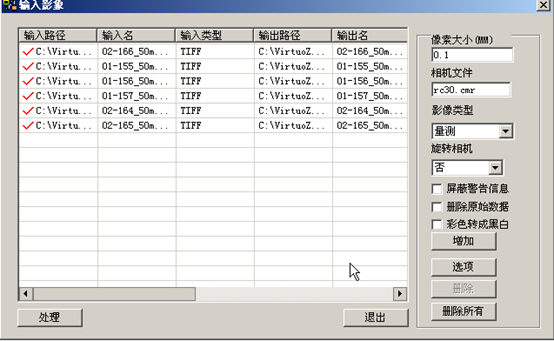
第四步,参数设置完成之后,还需要对影像文件进行转换,将各种影像文件转换成VirtuoZo支持的影像格式(VirtuoZo系统有其自有的影像格式,文件格式为*.vz,后文简称该文件为VZ影像)。进入文件à引入à影像文件,进入输入影像对话框,按 增加 按钮选择需转化格式的tif影像(可选择多幅影像),按处理 按钮将影像格式转换为后缀为vz 的影像。
⑴像素大小(mm):0.1
⑵加载要引入的影像
如图二所示
⒊模型的设置
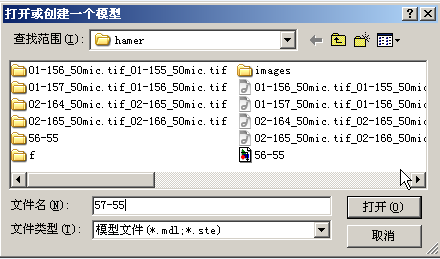
现以156和155两张影像为例,介绍模型的创建过程:通过文件à打开模型,可以建立一个新模型,命名为57-55,默认后缀名为mdl,建立好56-55模型后,程序自动弹出模型参数设置对话框,按照该模型的基本情况设置该对话框,主要设置左、右影像,其它可按程序默认参数设置,之后保存退出。如图三所示
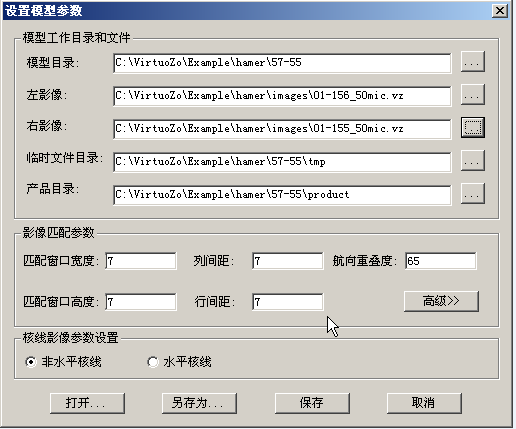
以上是VirtoZoNT的作业基础,有了测区和模型以后,就可以重构三维信息了。
⒉航片的内定向、相对定向和绝对定向
第一步,调用内定向程序(处理à定向à内定向),建立框标模板(若模板已建立,则进入左影像的内定向),建立框标模板如图13所示:
不同型号的相机有着不同的框标模板。一般一个测区是使用同一相机摄影,所以只需在测区内选择一个模型建立框标模板并进行内定向,其他模型内定向就不再需要重新建立框标模板,直接进入内定向处理。本实习数据是使用同一相机。
左边的窗口显示了当前模型的影像,它的四角和四边上的框标被小白框围住。右边的小窗口显示了某框标的放大影像。若小白框没有围住框标,则可在框标上单击,小白框将自动围住框标。这样来调整小白框的位置,尽量使框标位于小白框的中心。然后单击接受按钮,完成框标定位。
系统读入影像,同时显示读影像进度条,影像读入完成后,显示如下窗口:
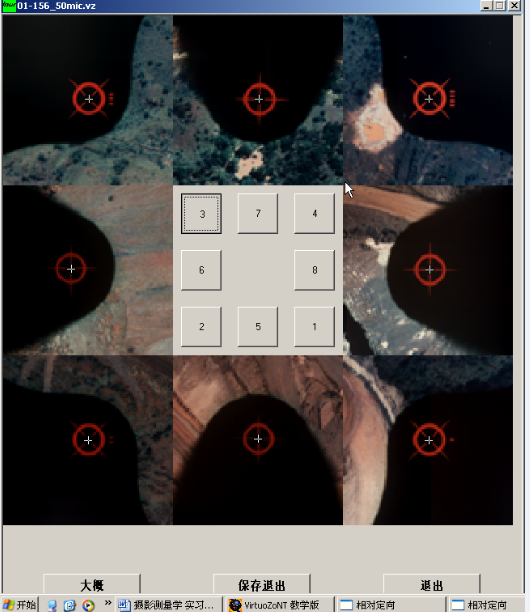
左边窗口的中心是按钮面板,每个方块按钮对应于一个框标。单击其中一个按钮,则右边微调窗口中将放大显示其对应的框标影像。左边窗口的四周是框标影像窗口,每个小窗口显示一个框标。
右边窗口的上边是IO 参数显示/修改窗口,可在此微调框标坐标。上半部的参数显示窗口,用来显示各框标的像片坐标、残差、内定向变换矩阵和中误差。下半部显示当前框标的放大影像。
4. 微调框标坐标
为使内定向的精度满足作业要求,应尽量使白色的十字丝对准框标的中心。这时,要使用到框标的放大影像。具体操作是通过方块按钮选择第一个框标,然后利用右边窗口中的按钮,进行微调,直到框标放大影像中的白色十字丝对准相机的框标中心,如图11。
对其他的框标用同样的方法进行调整,将所有的白色十字丝对相机准框标中心,然后选择保存退出,左影像内定向完成。重复以上步骤对模型中的右影像做内定向操作。完成模型的内定向,进入相对定向。
退出内定向程序模块;
注意:对于已做过内定向处理的模型,当在 VirtuoZo 标准版界面上单击处理à模型定向à内定向菜单项时,系统会弹出上次的内定向处理结果并询问是否重新进行内定向处理。
第二步相对定向
调用相对定程序(处理à定向à相对定向),程序界面如图所如上图所示,在相对定向界面点鼠标右键,选择自动相对定向,程序将自动寻找同名点,进行相对定向。完成后,影像上显示相对定向点(红十字丝)。
第三步绝对定向 绝对定向前,要以手工的方式在当前模型的左右影像上准确的定位一些控制点(单模型至少要四个或四个以上的控制点)。
打开 hamerIndex.html 文件,查看测区的控制点分布情况,在航片上点击控制点,会出现放大图像,是量测控制点的依据。量测控制点是在相对定向的界面下进行的。见图13,按右键,在弹出的菜单上选全局显示,在相对定向的界面中出现整张的左\右影像上,如图15 所示,参照给出的控制点点位图,寻找相应的控制点,找到后在点位附近点击,系统会弹出一放大的影像的小窗口,在该小窗口中,将光标对准该控制点,单击鼠标左键,程序将自动匹配出右\左影像上的同名点,也以一放大的影像的小窗口显示,同时有一个调整点位的对话框出现,

当量测三个控制点后(三个控制点不能位于一条线上),系统会预测该模型其余控制点的位置。影像上显示出几个蓝色小圈,即系统预测的待测控制点的近似位置。
进入普通方式的绝对定向(在相对定向界面点击鼠标右键,选择绝对定向à普通方式),程序进行绝对定向计算,可以得到如下图所示的界面:在定向结果窗中显示绝对定向的中误差及每个控制点的定向误差。同时弹出控制点微调窗,窗中显示当前控制点的坐标,且设置了立体下的微调按钮。
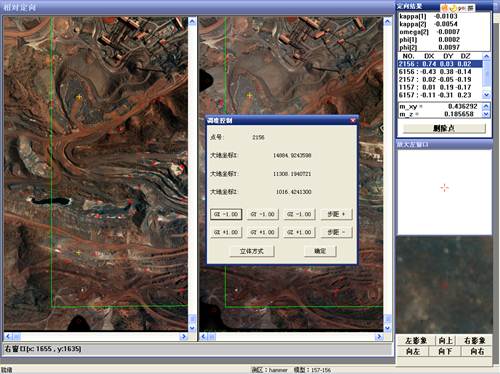
根据控制点残差显示可知绝对定向的精度如何,若某控制点残差过大,则可进行微调。其微调方法与步骤如下:
在定向结果窗中对某控制点误差行单击鼠标左键,选中该点,弹出该控制点的微调窗。
立体影像微调(必须在支持立体显示的计算机上才可以用此功能):
选中另一个需调整的点,进行微调。
所需调整的点均完成后,选择控制点微调窗中的确定按钮,程序返回相对定向界面。
至此,绝对定向完成。
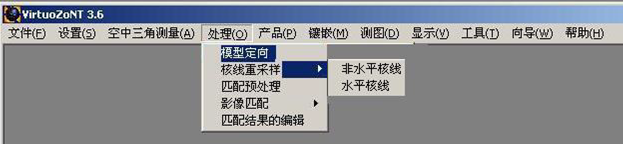
⒊ 生成核线影像
直接在VirtuoZo 主界面中单击处理菜单下的核线重采样菜单项,系统将自动生成当前模型的核线影像。
⒋ 影像匹配
生成核线影像后,即可进行影像匹配,选择菜单处理→影像匹配,系统将自动进行影像匹配。匹配过程中,会显示出匹配的进度。
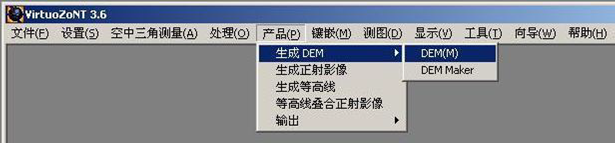
⒌单模型的DEM的生成
完成模型的影像匹配和匹配结果的编辑之后,可生成数字高程模型DEM。单模型的DEM是指使用一个单模型的数据,生成的位于该单模型区域内的DEM。一般情况下生成的DEM都是单模型的DEM。
单模型透视景观:建立数字地面模型后,在系统主菜单中,选择显示à立体显示à透示显示项,,进入显示界面,屏幕显示当前模型的数字地面模型,如图所示

四、实验总结
通过本次实验,初步掌握了数字摄影测量中的内定向,相对定向和绝对定向以及数字DEM的建立与表示,了解了VirtuoZo软件的基本操作,但还不够熟练,对于软件的应用与概念的理解还有待加强。
第二篇:摄影测量实习报告翟智佳
摄影测量实习报告
——单张影像空间后方交会程序设计
实习时间 2013.5.20-2013.5.24
学生班级 学生姓名
学生学号所在院系 矿业工程学院
指导教师
一、实习目的
1.深入理解单片空间后方交会的原理,体会在有多余观测情况下,用最小二乘平差方法编程实现解求影像外方位元素的过程。
2.利用Visual C++或者Matlab(或其他熟悉的计算机语言)编写一个完整的单片空间后方交会程序,通过对提供的试验数据进行计算,输出像片的外方位元素并进行评定精度。
3.通过编写程序实现单张影像空间后方交会计算,掌握非线性方程线性化的过程、相应数据读入与存储的方法以及迭代计算的特点,巩固各类基础课程及计算机课程的学习内容,培养上机调试程序的动手能力,通过对实验结果的分析,增强综合运用所学知识解决专业实际问题的能力。
二、实习环境
1.硬件环境:Window操作系统
2.软件环境:VC++或Matlab或其他计算机语言
三、实习内容
利用一定数量的地面控制点,根据共线条件方程求解像片外方位元素并进行精度评定。
四、实习原理
1.共线方程
x??fa1(X?Xs)?b1(Y?Ys)?c1(Z?Zs)
a3(X?Xs)?b3(Y?Ys)?c3(Z?Zs)
a(X?Xs)?b2(Y?Ys)?c2(Z?Zs)y??f2
a3(X?Xs)?b3(Y?Ys)?c3(Z?Zs)
2.精度评定
mi?m0?ii 其中m0?? VV2n?6
五、实习数据
1.模拟像片一对:左片号23 右片号24
2.像片比例尺: 1/30000
3.航摄机主距:f=150mm
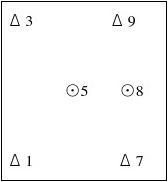
4.每张像片有4个控制点
5.点位略图
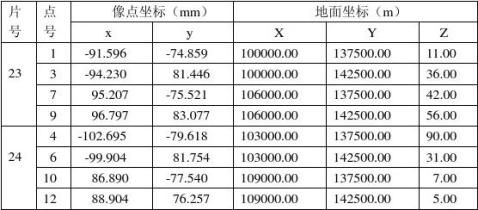

6.各片像点坐标及其地面坐标
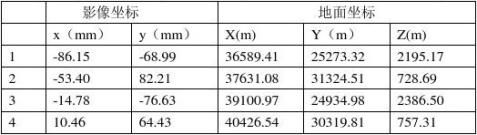
六、验证数据
1.已知航摄仪内方位元素f=153.24mm,Xo=Yo=0。 2.已知4对点的影像坐标和地面坐标
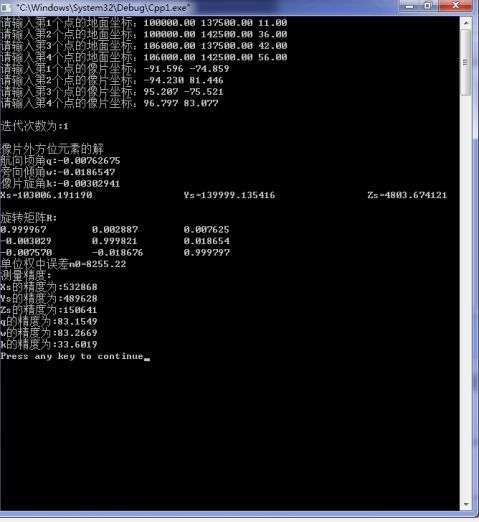
3.解算结果
?0.997710.067530.00399??? YS?27476.46m R??-0.067530.99772-0.00221??ZS?7572.69m?-0.004120.001840.9999??0XS?39795.45m
七、程序过程框图:
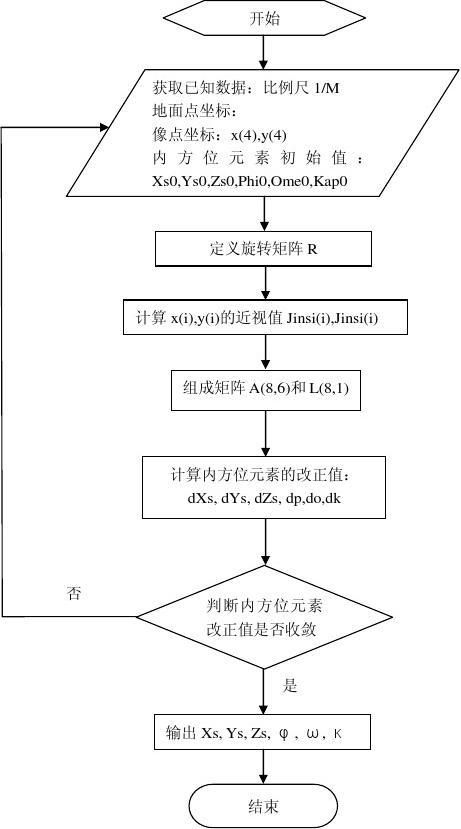
八.实现程序
#include "iostream.h"
#include"stdio.h"
#include "stdlib.h"
#include<math.h>
#define N 4
void mult(double *m1,double *m2,double *result,int i_1,int j_12,int j_2)//矩阵相乘
{
int i,j,k;
for(i=0;i<i_1;i++)
for(j=0;j<j_2;j++)
{
result[i*j_2+j]=0.0;
for(k=0;k<j_12;k++)
result[i*j_2+j]+=m1[i*j_12+k]*m2[j+k*j_2]; }
return;
}
int invers_matrix(double *m1,int n)//矩阵求逆
{
int *is,*js;
int i,j,k,l,u,v;
double temp,max_v;
is=(int *)malloc(n*sizeof(int));
js=(int *)malloc(n*sizeof(int));
if(is==NULL||js==NULL){
printf("out of memory!\n");
return(0);
}
for(k=0;k<n;k++){
max_v=0.0;
for(i=k;i<n;i++)
for(j=k;j<n;j++){
temp=fabs(m1[i*n+j]);
if(temp>max_v){
max_v=temp; is[k]=i; js[k]=j;
}
}
if(max_v==0.0){ free(is); free(js); printf("invers is not availble!\n"); return(0); } if(is[k]!=k) for(j=0;j<n;j++){ u=k*n+j; v=is[k]*n+j; temp=m1[u]; m1[u]=m1[v]; m1[v]=temp; } if(js[k]!=k) for(i=0;i<n;i++){ u=i*n+k; v=i*n+js[k]; temp=m1[u]; m1[u]=m1[v]; m1[v]=temp; } l=k*n+k; m1[l]=1.0/m1[l]; for(j=0;j<n;j++) if(j!=k){ u=k*n+j; m1[u]*=m1[l]; } for(i=0;i<n;i++) if(i!=k) for(j=0;j<n;j++) if(j!=k){ u=i*n+j; m1[u]-=m1[i*n+k]*m1[k*n+j]; } for(i=0;i<n;i++) if(i!=k){ u=i*n+k; m1[u]*=-m1[l]; } } for(k=n-1;k>=0;k--){ if(js[k]!=k) for(j=0;j<n;j++){ u=k*n+j; v=js[k]*n+j; temp=m1[u]; m1[u]=m1[v]; m1[v]=temp; } if(is[k]!=k) for(i=0;i<n;i++){ u=i*n+k; v=i*n+is[k];
temp=m1[u]; m1[u]=m1[v]; m1[v]=temp;
}
}
free(is); free(js);
return(1);
}
void transpose(double *m1,double *m2,int m,int n) //矩阵转置 {
int i,j;
for(i=0;i<m;i++)
for(j=0;j<n;j++)
m2[j*m+i]=m1[i*n+j];
return;
}
void main()
{
double Xs,Ys,Zs,q,w,k;
double a[3],b[3],c[3];
double x0,y0,f;
double x[N],y[N];
double X[N],Y[N],Z[N];
double x1[N],y1[N];
double m;
double L[2*N];
double XX[6];
double A[2*N][6];
double X0[N],Y0[N],Z0[N],At[6][2*N],result1[6][6],result2[6][1]; int i,n=0;
double sum=0,m0;
/*---------------输入点地面坐标---------------------*/
for(i=0;i<N;i++)
{
printf("请输入第%d个点的地面坐标:",i+1);
scanf("%lf%lf%lf",&X[i],&Y[i],&Z[i]);
}
/*---------------输入点像片坐标---------------------*/
for(i=0;i<N;i++)
{
printf("请输入第%d个点的像片坐标:",i+1);
scanf("%lf%lf",&x[i],&y[i]); } cout<<endl; /*-----------------设定外方位元素初始值--------------*/ x0=0;y0=0;f=150;m=30000; Xs=0;Ys=0;Zs=f*m/1000; q=0;w=0;k=0; XX[3]=1; /*------------------迭代计算--------------------------*/ while((XX[3]>0.00001 || XX[4]>0.00001 || XX[5]>0.00001)&&n<100) { /*----------------旋转矩阵R-----------------------*/ a[0]=cos(q)*cos(k)-sin(q)*sin(w)*sin(k); a[1]=-cos(q)*sin(k)-sin(q)*sin(w)*cos(k); a[2]=-sin(q)*cos(w); b[0]=cos(w)*sin(k); b[1]=cos(w)*cos(k); b[2]=-sin(w); c[0]=sin(q)*cos(k)+cos(q)*sin(w)*sin(k); c[1]=-sin(q)*sin(k)+cos(q)*sin(w)*cos(k); c[2]=cos(q)*cos(w); /*-----------------像点坐标计算值------------------*/ for(i=0;i<N;i++) { X0[i]=a[0]*(X[i]-Xs)+b[0]*(Y[i]-Ys)+c[0]*(Z[i]-Zs); Y0[i]=a[1]*(X[i]-Xs)+b[1]*(Y[i]-Ys)+c[1]*(Z[i]-Zs); Z0[i]=a[2]*(X[i]-Xs)+b[2]*(Y[i]-Ys)+c[2]*(Z[i]-Zs); x1[i]=x0-f*X0[i]/Z0[i]; y1[i]=y0-f*Y0[i]/Z0[i]; } /*-------------误差方程中各偏导数的值--------------*/ for(i=0;i<N;i++) { A[2*i][0]=((a[0]*f+a[2]*(x[i]-x0)))/Z0[i]; A[2*i][1]=((b[0]*f+b[2]*(x[i]-x0)))/Z0[i]; A[2*i][2]=((c[0]*f+c[2]*(x[i]-x0)))/Z0[i]; A[2*i][3]=(y[i]-y0)*sin(w)-((x[i]-x0)*((x[i]-x0)*cos(k)-y[i]*sin(k))/f+f*cos(k))
*cos(w);
A[2*i][4]=-f*sin(k)-(x[i]-x0)*((x[i]-x0)*sin(k)+(y[i]-y0)*cos(k))/f; A[2*i][5]=y[i]-y0;
L[2*i]=x[i]-x1[i];
A[1+2*i][0]=((a[1]*f+a[2]*(y[i]-y0)))/Z0[i];
A[1+2*i][1]=((b[1]*f+b[2]*(y[i]-y0)))/Z0[i];
A[1+2*i][2]=((c[1]*f+c[2]*(y[i]-y0)))/Z0[i];
A[1+2*i][3]=-(x[i]-x0)*sin(w)-((y[i]-y0)*((x[i]-x0)*cos(k)-(y[i]-y0)*sin(k))/f-f*sin(k))
*cos(w);
A[1+2*i][4]=-f*cos(k)-(y[i]-y0)*((x[i]-x0)*sin(k)+(y[i]-y0)*cos(k))/f;
A[1+2*i][5]=-x[i]+x0;
L[1+2*i]=y[i]-y1[i];
}
/*-------------------解法方程--------------------*/
transpose(&A[0][0],&At[0][0],2*N,6);
mult(&At[0][0],&A[0][0],&result1[0][0],6,2*N,6);
invers_matrix(&result1[0][0],6);
mult(&At[0][0],L,&result2[0][0],6,2*N,1);
mult(&result1[0][0],&result2[0][0],&XX[0],6,6,1);
Xs+=XX[0];
Ys+=XX[1];
Zs+=XX[2];
q+=XX[3];
w+=XX[4];
k+=XX[5];
n++;
}
/*----------------旋转矩阵R-----------------------*/
a[0]=cos(q)*cos(k)-sin(q)*sin(w)*sin(k);
a[1]=-cos(q)*sin(k)-sin(q)*sin(w)*cos(k);
a[2]=-sin(q)*cos(w);
b[0]=cos(w)*sin(k);
b[1]=cos(w)*cos(k);
b[2]=-sin(w);
c[0]=sin(q)*cos(k)+cos(q)*sin(w)*sin(k);
c[1]=-sin(q)*sin(k)+cos(q)*sin(w)*cos(k);
c[2]=cos(q)*cos(w);
cout<<"迭代次数为:"<<n<<endl;
printf("\n像片外方位元素的解\n");
} cout<<"航向顷角q:"<<q<<endl; cout<<"旁向倾角w:"<<w<<endl; cout<<"像片旋角k:"<<k<<endl; printf("Xs=%lf\t\tYs=%lf\t\tZs=%lf\n",Xs,Ys,Zs); cout<<endl; printf("旋转矩阵R:\n"); for(i=0;i<3;i++) printf("%lf\t",a[i]); printf("\n"); for(i=0;i<3;i++) printf("%lf\t",b[i]); printf("\n"); for(i=0;i<3;i++) printf("%lf\t",c[i]); printf("\n"); /*-------------------计算单位权中误差---------------*/ for(i=0;i<2*N;i++) sum+=L[i]*L[i]; m0=sqrt(sum/(2*N-6)); cout<<"单位权中误差m0="<<m0<<endl; cout<<"测量精度:"<<endl; cout<<"Xs的精度为:"<<m0*sqrt(result1[0][0])<<endl; cout<<"Ys的精度为:"<<m0*sqrt(result1[1][1])<<endl; cout<<"Zs的精度为:"<<m0*sqrt(result1[2][2])<<endl; cout<<"q的精度为:"<<m0*sqrt(result1[3][3])<<endl; cout<<"w的精度为:"<<m0*sqrt(result1[4][4])<<endl; cout<<"k的精度为:"<<m0*sqrt(result1[5][5])<<endl;
九、程序运行结果 23像片运行结果
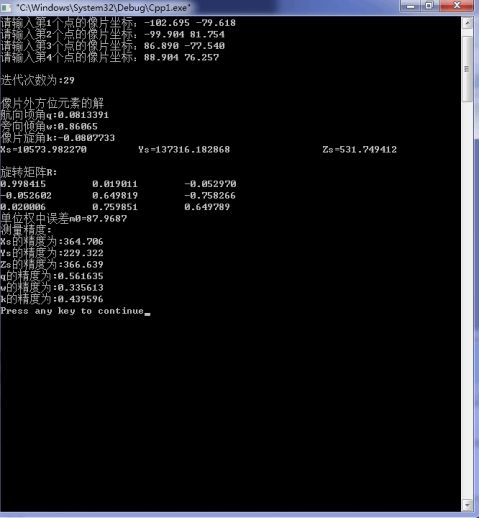
24号像片运行结果
10.实习心得
通过一周的实习,让我感觉得到了自己摄影测量知识的欠缺
和编程方面的无措。不过最后在同学们的帮助下中雨完成了这次实习 而在编程里也学习了好多以前没见过的函数,mult是矩阵相乘的函数、invers_矩阵求逆函数、transpose矩阵转换函数。这对以后的学习是大有裨益的。
通过此次实习,才知道书到用时方恨少,同时下定决心好好学习,非常感谢老师给我们提供此次实习。
-
数字摄影测量实习报告
数字摄影测量实习报告书学号20xx1000684班级序号11311205姓名舒超指导老师宋妍成绩中国地质大学武汉信息工程学院遥感科…
-
VirtuoZo NT全数字摄影测量系统实习报告
VirtuoZo全数字摄影测量系统实习报告一、实习目的通过本次实习,了解4D产品的生产过程,熟悉使用VirtuoZo全数字摄影测量…
-
数字摄影测量实习报告书
实习报告书专用纸1引言数字摄影测量是基于摄影测量的基本原理通过对所获取的数字数字化影像进行处理自动半自动提取被摄对象用数字方式表达…
-
全数字摄影测量实习报告
全数字摄影测量实习报告学号姓名班级专业课程名称数字摄影测量学指导老师20xx年1月一目的和要求了解全数字摄影测量的作业步骤二资料及…
-
数字摄影测量实习报告
目录1目的与要求12实习内容13操作步骤131新建测区设置测区参数文件132模型生成333模型定向与生成核线影像4331模型内定向…
-
摄影外业测量实习报告
组别:指导老师:姓名:班级:学号:黄河水利职业技术学院实习内容:航摄像片调绘、新增地物补测及选刺像控点三项实习时间:20xx年x月…
-
摄影测量实习报告
一、实习目的与要求本次实习是在摄影测量的教学基础上,理论实际相联系的动手操作实习,是我们在学习测量专业的一个重要的实习环节。一方面…
-
VirtuoZo NT全数字摄影测量系统实习报告
VirtuoZo全数字摄影测量系统实习报告一、实习目的通过本次实习,了解4D产品的生产过程,熟悉使用VirtuoZo全数字摄影测量…
-
摄影测量内业实习报告
摄影测量内业实习报告姓名xxx班级学号xxx指导老师XX20xx年1月1实习目的VirtuoZo从原始资料中间成果及最后产品等都是…
-
摄影测量实习报告
摄影测量学实习报告系别测绘与城市空间信息系专业姓名学号指导教师柏春岚杨明强河南城建学院20xx年11月26日目录前言1实习意义与目…
-
摄影测量-实习总结
黄河水利职业技术学院测绘工程系摄影测量实习总结班级:工程测量0905班姓名:任二朋学号:20xx020618时间:20xx年x月在…