物理 用三线摆测物体的转动惯量
用三线摆测物体的转动惯量
1、了解三线摆原理,并以此测物体的转动惯量。
2、掌握秒表、游标卡尺等测量工具的使用方法,掌握测周期的方法。
3、加深对转动惯量概念的理解。
1、三线摆测转动惯量的原理。
2、准确测量三线摆扭摆周期。
讲授、讨论与演示相结合。
3学时。
转动惯量是刚体转动惯性的量度,它的大小与物体的质量及其分布和转轴的位置
有关。对质量分布均匀、形状规则的物体,通过外形尺寸和质量的测量,就可以算出
其绕定轴的转动惯量,而质量分布不均匀、形状不规则物体的转动惯量则要由实验测
出。本实验利用三线摆测出圆盘和圆环对中心轴的转动惯量并与理论值进行比较。
三线扭摆法测量转动惯量的优点是:仪器简单,操作方便、精度较高。
一、实验目的
1、了解三线摆原理,并以此测物体的转动惯量。
2、掌握秒表、游标卡尺等测量工具的使用方法,掌握测周期的方法。
3、加深对转动惯量概念的理解。
二、实验仪器
三线摆仪,秒表,游标卡尺,钢直尺,水准器,待测圆环。
三、实验原理
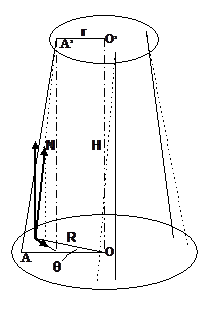
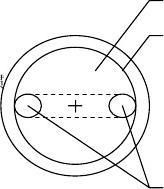
三线摆实验原理如图所示,圆盘(下盘)由三根悬线悬挂于启动盘(上盘)之下,两圆盘圆心位于同一竖直轴上。轻扭上盘,在悬线扭力的作用下、圆盘可绕其中心竖轴作小幅扭摆运动。
设圆盘的质量为m0、上下盘的间距为H、上下盘的受力半径为r与R、圆盘的扭摆角为θ(θ很小)。
由于θ很小,所以圆盘在扭摆中升起的高度很小,可以认为在此过程中上下盘的间距H保持不变。在此情况下,根据三角关系可以导出悬线拉力N对圆盘的扭力矩为:
 。因为
。因为 ,所以
,所以 。
。
 设圆盘的转动惯量为J0,且M与角位移θ的
设圆盘的转动惯量为J0,且M与角位移θ的
方向相反,根据转动定律可得:

由此可知圆盘的扭摆为简谐振动,解此微分
方程得圆盘的振动周期为:
 于是:
于是:

此即为圆盘对中心竖轴转动惯量的实验公式。
在圆盘上同心叠放上质量为m的圆环后,测出盘环系统的扭摆周期T,则盘环
系统的转动惯量为: 
由此可得圆环转动惯量的实验公式:
圆盘、圆环转动惯量的理论公式为: 、
、
式中R0、R1、R2分别为圆盘半径及圆环的内外半径。
四、实验内容及步骤
1、用水准器调三线摆仪底座水平及下盘水平。
2、使下盘静止,然后朝同一方向轻转上盘,使下盘作小幅扭摆。控制摆角不超过 。
。
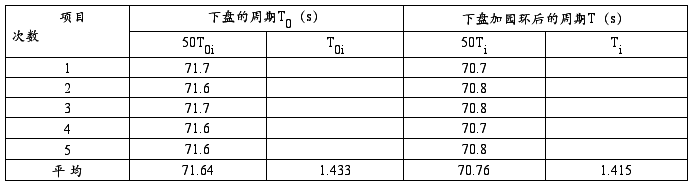
3、待下盘扭摆稳定后,用秒表测出连续摆动50个周期的时间,重复5次,然后算
出周期T0的平均值。
4、将圆环同心地放置于圆盘上,重复步骤2、3,测出周期T的平均值。
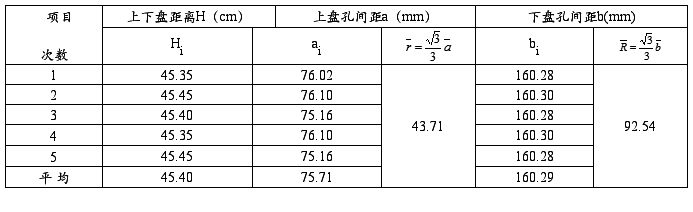
5、用钢直尺在不同位置测量上下盘之间的垂直距离5次。
用游标卡尺在不同位置分别测量上下盘悬线孔间距各5次。
计算H、a、b的平均值,并由此算出受力半径r与R的平均值。
6、用游标卡尺沿不同方向测量圆盘直径、圆环内外径各5次。
算出2R0、2R1、2R2的平均值。
7、记录圆盘、圆环的质量m0、m及本地的重力加速度g。
五、注意事项
1、调下圆盘水平时,松开固定悬线的螺母后要注意控制住调节悬线长度的螺母,防
止悬线滑落。
2、圆盘(或盘环)要在静止状态下开始启动,以防止在扭摆时出现晃动,圆盘扭摆
的角度θ须≤50。
3、圆盘(或盘环)启动后可连续测完5个50次周期,不必每次重新启动。
4、注意游标卡尺的零点修正、秒表与米尺的最小分度值及估读。
六、课堂指导
1、圆盘水平的调节方法。
2、圆盘启摆的要求、方法及摆幅控制。
3、圆盘扭摆周期的观察方法。
4、游标卡尺的使用方法。
七、思考题
1、三线摆的振幅受空气的阻尼会逐渐变小,它的周期也会随时间变化吗?
答:振幅反映出谐振的强度;周期反映的是谐振的频率,这是两个意义不同的物理量。
阻尼振动的周期 ,阻尼系数
,阻尼系数 是常数,所以周期不随时间而变化。
是常数,所以周期不随时间而变化。
2、试分析:加了待测物之后,三线摆的扭摆周期是否一定大于空盘的扭摆周期?
答:不一定。∵ ,∴
,∴ ,或
,或 ·
· >1。
>1。
因为 >1,所以
>1,所以 不一定大于1,即
不一定大于1,即 不一定大于
不一定大于 (可以大于、等于或小
(可以大于、等于或小
于)。
八、数据处理
1、数据记录及表格
①下盘质量m0= 1.163 (kg); 园环质量m= 0.371 (kg);g = 9.781 m/s2
②几何尺寸测量:钢直尺最小分度值 1 mm;
游标卡尺最小分度值 0.02 mm;零点修正值 0.00 mm

③周期测量:秒表最小分度值__0.1__s;零点修正值__0.00__s
班级 序号 姓名 教师签字 日期
2、数据处理
①计算圆盘、圆环转动惯量的实验值 、
、


②计算圆盘、圆环转动惯量的理论值 、
、


③计算实验值与理论值的相对误差

九、教学后记
1、用水准仪调圆盘水平时需要技巧,须对学生说明。
2、实验中要注意巡视,观察学生的操作,随时指出他们的问题。
3、周期测量是否准确对实验结果的影响最大,其次是孔间距。要说明圆盘(或盘环)启摆的要求和方法,以及摆幅的要求。只有圆盘(或盘环)的扭摆合乎要求,才能保证周期测量的准确性。测孔间距实际上是测两线孔中悬线间的距离,所以在测量中尺要注意对准悬线的位置。
第二篇:三线摆测物体转动惯量实验报告
桂林电子科技大学物理实验中心 物理实验教案
三线摆测物体转动惯量
【实验目的】
1. 学会使用三线摆(IM—1新型转动惯量测定仪)
2. 了解掌握霍尔开关的原理
3. 掌握转动惯量的多种测量方法
4. 设计数据处理方法
【实验仪器】
IM—1新型转动惯量测定仪、霍尔开关传感器、多功能毫秒计、游标卡尺、米尺。
【仪器外形】
【预习要求】
1. 理解该实验的实验原理
2. 掌握IM—1新型转动惯量测定仪的使用及基本操作方法
3. 掌握霍尔开关的原理及应用范围
4. 测量数据的设定及数据处理方法
【实验原理】
依照机械能守恒定律,如果扭角足够小,悬盘的运动可以看成简谐运动,结合有关几何关系得如下公式:
1. 悬盘空载时绕中心轴作扭摆时得转动惯量为:
I0=M0gRr2 (3—1) ?T024πH
2其中M0是圆盘质量;g是重力加速度(g=9.80m?s);r、R分别指
上下圆盘中心的到各悬线点的距离;H是上下圆盘之间的距离;T0是圆盘转动周期。
2. 悬盘上放质量为M1物体,其质心落在中心轴,悬盘和M1物体对于中心轴共同的总转动惯量为:
I1=(M0+M1)gRr?T2 (3—2) 4π2H1
其中各量与1中相对应。
桂林电子科技大学物理实验中心 物理实验教案
将式3—2变形可得质量为M1物体对中心轴的转动惯量IM1: IM1=I1?I0 (3—3)
转轴平行移动距离d3. 质量为M2的物体绕过质心轴线的转动惯量为I,
时,其绕新轴的转动惯量将变为I′=I+M2d,将两个质量相同的圆柱体2
M2对称地放置在悬盘的两边,并使其边缘与圆盘上同心圆刻槽线切,如图3—1所示,若实验测得摆动周期为T2,则两圆柱体和悬盘对中心轴的总转动惯量为:
I2=(M0+2M2)gRr?T2 3-4 2 4π2H2
则两个质量为M2IM2=1(I2?I0) 3-5 2
3
1.悬盘 2. 同心圆刻槽线 3. 圆柱体 图3-1
4.由平行轴定理,可从理论上求得:
IM2=′12M2r柱+M2d2 3-6 2
5. 改变上下圆盘之间的距离H(5次),测量下悬盘摆动的周期T0(5次),
用作图法处理
数据。
【仪器调节】
1. 三线摆调节:
(1) 调节上盘水平:把水平仪放在上圆盘上,调节启动盘锁紧旋钮。
(2) 调节下盘水平:把水平仪放在下圆盘上,调节上圆盘的三个摆
线调节旋钮。
2. 调节霍尔开关探头和计时仪
桂林电子科技大学物理实验中心 物理实验教案
(1) 调节霍尔开关探头的位置,使其恰好在悬盘下面粘着的小磁钢
的下方10mm左右,此时计时仪的低电平指示发光管处于刚好
能亮。起动盘启动后须复位到起始位置。
(2) 调节计时仪的次数位置(预设次数小于65次),然后按RESET
键复位,一旦计时仪开始计时,次数预置改变无效。须按RESET
键复位后才有效。
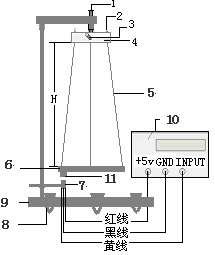
【仪器结构】
1、起动盘锁紧螺母
2、摆线调节锁紧螺栓
3、摆线调节旋扭
4、启动盘
5、摆线
6、悬盘
7、霍尔开关传感器
8、底板调节螺钉
9、底板
10、计时毫秒仪
11、磁钢
【实验步骤】
1.读出悬盘质量M0,测出圆环和圆柱质量M1、M2,填入表中。
2.调节8,使9水平
3.松开2,调节3,改变5的长度,使6水平。
4.安装7,使之在11正下方5~10mm处,并连接10。
5.计时毫秒仪预置次数的设定:根据霍尔开关一个周期输出两次低电平,若测10个周期的时间,计时毫秒仪预置次数应设置为
20。(注意: 一旦计时仪开始计时,次数预置改变无效。须按RESET键复位后才有效。)
6.使6静止,打开电源,松开1,向左向右小于5度对称转动4。
7.观察11是否对称7扭摆,是就按10的RESET(复位)键。
8.当10计时停止,记录数据,填入表1中,再按10的RESET(复位)键,再记录数据。若摆角减小到霍尔开关不能一个周期两次输出低电平时,重新摆动悬盘。直至记录需要的数据。
9.把圆环放在悬盘上,其质心落在悬盘的
桂林电子科技大学物理实验中心 物理实验教案
中心轴上,重复4、5、6,并记录数据,
填入表1中。
10.取下圆环,把两个圆柱按右图1放好,重
复4、5、6,并记录数据,填入表中。 右图1
11.用米尺测量4与6之间的距离H,用游
标卡尺测量6的直径D,圆环的内径和
外径、圆柱的直径、D槽(如右图1)、4
和6线点间的距离a、b(如右图2),填
入表中。 右图2
12.整理实验仪器。
【实验内容】
1. 测量下悬盘的转动惯量I0:
(1)测量上下圆盘旋点到盘中心的距离r和R,其方法如下:
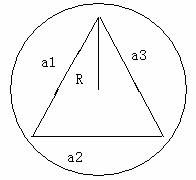
3-2下圆盘R的测量
示意图
用游标卡尺测量下圆盘各旋点间的距离a1、a2、a3 用游标卡尺测量上圆盘各旋点间的距离b1、b2、b3 用公式R=a+a2+a33,a和r=b,其中a=1
333
b=b1+b2+b3
3。
(2)用米尺测量上下圆盘间的距离H。
桂林电子科技大学物理实验中心 物理实验教案
(3)记录圆盘测定质量M0。
(4)测量下圆盘摆动的周期T0:轻轻旋转上圆盘,使下圆盘悬盘作扭转摆动(摆角小于5度),记录数据。 2. 测量悬盘加圆环的转动惯量I1 (1)用物理天平测量圆环的质量M1。
(2)在下悬盘上放上圆环并使之中心对准悬盘的中心。 (3)测量加上圆环后摆动周期T1。
(4)用游标卡尺测量圆环的内、外径D内和D外。 3. 验证平行轴定理
(1)用物理天平测量圆环的质量M2。
(2)将两个相同的圆柱体按照下悬盘上的刻线对称地放在悬盘上,相距
一定地距离2d=D槽-D柱 (3)测量摆动周期T2。
(4)测量圆柱体地直径D柱和悬盘上圆柱体所处地刻线直径D槽。
【实验数据记录】
1. 表1 个周期地测定
测量项目
悬盘质量M0=
圆环质量M1=
圆柱质量
M2=
预设次数总时间(秒ts)
桂林电子科技大学物理实验中心 物理实验教案
平均时间 平均周期
2. 表2 上下圆盘几何参数及其间距离(cm)

3 测量项目
D内 D外D柱 D槽
次 数 平均值
2d=D槽-D柱
4. 表4 下圆盘之间的距离H(5次)与下悬盘摆动的周期T0(5)
距离 预设次数 总时间
12345平均值 平均周期
H1= H2= H3= H4= H5=
桂林电子科技大学物理实验中心 物理实验教案
【数据处理】
1. 计算下悬盘的转动惯量I0的绝对误差ΔI0。
2. 写出结果表达式I0=I0I0,用科学计数法表示,要求尾数对齐。
3. 计算圆环的转动惯量IM1的绝对误差ΔIM1,公式为
?ΔIM1??ΔI??ΔI???=?1?+?0?, ?I??ΔI??I??M1??1??0?
ΔI1和ΔI0由各自地误差传递公式计算。
4. 写出结果表达式I1=I1I1,用科学计数法表示,要求尾数对齐。
5. 把公式I0=222M0gRrM0gRr2H=?T02=λ?T02,变形为根据表4?T1224πH4πI0
的数据,作出
H?T02图,求出斜率λ,并求出转动惯量I0。
【思考练习】
1. 实验中误差来源有哪些?如何克服?
2. 比较两种方法求I0的优劣?
3. 总结霍尔开关在实验中应用注意事项。
桂林电子科技大学物理实验中心 物理实验教案
【参考数据记录】 1. 转动惯量的测量
(1) 表1 10个周期地测定
测量项目
悬盘质量
圆环质量
圆
柱
质
量
M0=479.0g
预设次数10个周期的总时间t(s)
M1=201.3g M2=200.7g
平均时间平均周期
(2) 表2 上下圆盘几何参数及其间距离(cm)
桂林电子科技大学物理实验中心 物理实验教案
(3) 表3 圆环、圆柱体几何参数(cm)
测量
项目
次
数 12.09612.098
12.110
平均值12.101
【参考数据处理】
1. 转动惯量的数据处理
(1) 各量的平均值:见各表中。
(2) 计算R、r的值:见表2。
(3) 计算d的值:见表3。
(4) 悬盘空载时的转动惯量:
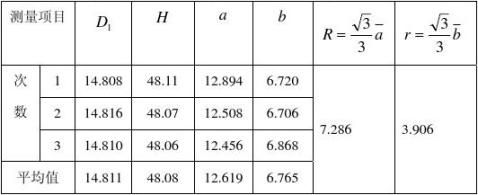
实验值: 2.5362.53812.9542.5522.55210.402 D内 D外D柱 D槽 2d=D槽-D柱
M0gRr2479.0×10?3×9.794×7.286×10?2×3.906×10?2
?T0=×1.38132I0=22?24πH4×3.14×48.08×10
1.335×10?2
=×1.38132=1.343×10?3Kg.m2
18.96
理论值:
I0='112=×479.0×10?3×(14.811×10?2)2=1.313×10?3Kg.m2M0D188
绝对误差:
桂林电子科技大学物理实验中心 物理实验教案
ΔI=I0?I0=.343×10
结果表示: ′?3?1.313×10?3=0.03×10?3Kg.m?2
I0=I0I=(1.340.03)×10Kg.m
相对误差: ?3?2
ΔI0.03×10?3
Er=×100%=×100%=2.2% ?3I01.34×10
(5) 圆环的转动惯量: 总转动惯量: 4π2H
(479.0+201.3)×10?3×9.794×7.286×10?2×3.906×10?2
2=×1.4305 2?24×3.14×48.08×10
1.896×10?2
=×1.43052=2.046×10?3Kg.m2
18.96
圆环转动惯量: I1=(M0+M1)gRr?T21
IM1=I1?I0=2.046×10?3?1.343×10?3=0.703×10?3Kg.m2 理论值:
1122?3?22?22()+=×201.3×10×((11.382×10)+(12.101×10))MD外1D内88
=0.6944×10?3Kg.m2I'M1=
绝对误差:
′1=0.703×10?3?0.6944×10?3=0.009×10?3Kg.m2ΔIM1=IM1?IM
结果表示:
桂林电子科技大学物理实验中心 物理实验教案
IM1=IM1IM1=(0.7030.009)×10Kg.m
相对误差:
Er=?32ΔIM1
IM10.009×10?3×100%=×100%=1.3% ?30.703×10
(6) 平行轴定理的验证 总转动惯量: 4π2H
(479.0+200.7)×10?3×9.794×7.286×10?2×3.906×10?2
2=×1.42814×3.142×48.08×10?2
1.895×10?2
=×1.42812=2.038×10?3Kg.m2
18.96
一个圆柱的转动惯量: I2=(M0+2M1)gRr?T12
IM2=
理论值: 11(I2?I0)=(2.038×10?3?1.343×10?3)=0.348×10?3Kg.m222
′12+M2d2IM2=M2r柱2
12.552×10?2
210.402×10?2
2?3?3)+100.4×10×() =×100.4×10×(222
=0.08173×10?3+0.2716×10?3=0.3533×10?3Kg.m2
相对误差:
桂林电子科技大学物理实验中心 物理实验教案
Er=
=ΔIM2IM2×100%=IM2?IM2IM2′×100%0.348×10?3?0.3533×10?3
0.348×10?3×100% =1.5%
由此可知:在误差范围内,可以认为IM2=IM2,既平行轴定理成立。 ′
-
大学物理实验之用三线摆测物体的转动惯量
大学物理实验之用三线摆测物体的转动惯量1了解三线摆原理并以此测物体的转动惯量2掌握秒表游标卡尺等测量工具的使用方法掌握测周期的方法…
-
实验11用三线摆测物体的转动惯量
实验11用三线摆测物体的转动惯量实验目的1学会用三线摆测物体的转动惯量2验证转动惯量的平行轴定理实验仪器三线摆FDIMII型计时计…
-
三线摆测定物体转动惯量实验指导与数据处理
三线摆测定物体转动惯量实验指导与数据处理1实验仪器清单11三线摆装置电子秒表游标卡尺米尺水平仪2实验内容21三线摆法测定悬盘的转动…
-
《用三线摆法测定物体的转动惯量》的示范报告
用三线摆法测定物体的转动惯量的示范报告竺江峰20xx年3月18日一教学目的1学会用三线摆测定物体圆环的转动惯量2学会用累积放大法测…
-
实验3 三线摆法测定物体的转动惯量
大学物理实验教案实验名称三线摆法测定物体的转动惯量1实验目的1掌握水平调节与时间测量方法2掌握三线摆测定物体转动惯量的方法3掌握利…
-
大学物理实验之用三线摆测物体的转动惯量
大学物理实验之用三线摆测物体的转动惯量1了解三线摆原理并以此测物体的转动惯量2掌握秒表游标卡尺等测量工具的使用方法掌握测周期的方法…
-
实验11用三线摆测物体的转动惯量
实验11用三线摆测物体的转动惯量实验目的1学会用三线摆测物体的转动惯量2验证转动惯量的平行轴定理实验仪器三线摆FDIMII型计时计…
-
实验3.1 三线摆法测量物体的转动惯量数据处理
三线摆法测量物体的转动惯量实验数据处理数据处理ra75500b1602043590cmR92492cm317320xx173205…
-
《用三线摆法测定物体的转动惯量》简明实验报告
《用三线摆法测定物体的转动惯量》的示范报告一、教学目的:1、学会用三线摆测定物体圆环的转动惯量;2、学会用累积放大法测量周期运动的…
-
三线摆法测量物体的转动惯量
实验三线摆法测量物体的转动惯量转动惯量是刚体转动惯性大小的量度是表征刚体特征的一个物理量转动惯量的大小除与物体质量有关外还与转轴的…
- 三线摆测转动惯量实验