��Ƭ��ԭ����Ӧ��ʵ�鱨��
��Ƭ��ԭ����Ӧ��ʵ�鱨��
��ʦ��
ѧ����
רҵ���������̼����Զ���
ѧԺ������ѧԺ
ѧ�ţ�
ʵ��һ������ʵ��
һ�� ʵ��Ŀ��
���õ�Ƭ����P1����IO�ڣ�ʹ�û�ѧ���������ʹ�á�
���� ʵ���豸������
IBM PC �� һ̨
DP-51PROC��Ƭ���ۺϷ���ʵ���� һ̨
Ƶ�ʼ� һ̨
���� ʵ������
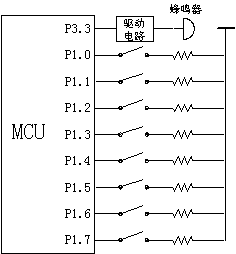
1. ��дһ�γ�����P1.3�ڿ���(���3K��4KƵ�ʵķ���)��ʹB5���ķ���������������������
2. ������������һ�γ�����P1.3�ڿ��ƣ�ʹB5���ķ��������������տ��֡������֡�

ͼ3.3 ������ԭ��ͼ
�ģ� ʵ�鲽��
1. ʹ�õ��߰�A2����P13��B5���� BUZZ������������
2. �ȱ�дһ����ʱ����120��200us����
3. �ٱ�дһ��ѭ�����ı�P1.3�ŵĵ�ƽ��Ȼ����ʱ�����������ѭ����ʹP1.3�����һ��Ƶ��Ϊ2.5KHz��4KHz�ķ�������DP-51PROC��Ƭ���ۺϷ���ʵ���������иó���ʱ��B5���ķ���������������������
4. �������������룬Ȼ�����У����������������տ��֡������֡�
�塢ʵ���ĺ�Դ����
ORG 0000H
JMP MAIN
ORG 000BH
JMP INTT0
ORG 0100H
MAIN:
MOV SP,#60H
MOV TMOD,#01H ;��ʼ����ʱ�������ж�
SETB ET0 ;����ʱ��0�ж�
SETB EA
SETB TR0 ;������ʱ��0
START0:
SETB P1.3
MOV 30H,#00H
NEXT:
MOV A,30H
MOV DPTR,#TABLE ;��TABLE�ж�ȡ���ݨD�D����ʱ��
MOVC A,@A+DPTR
MOV R2,A
JZ ENDD
ANL A,#0FH
MOV R5,A
MOV A,R2
SWAP A
ANL A,#0FH
JNZ SING
CLR TR0
JMP D1
SING:
DEC A
MOV 22H,A
RL A
MOV DPTR,#TABLE1 ;��TALBE1�ж�ȡ���ݨD�D����
MOVC A,@A+DPTR
MOV TH0,A
MOV 21H,A
MOV A,22H
RL A
INC A
MOVC A,@A+DPTR
MOV TL0,A
MOV 20H,A
SETB TR0
D1:
CALL DELAY ;������ʱ
INC 30H
JMP NEXT
ENDD:
CLR TR0
JMP START0
INTT0: ;��ʱ��0�жϷ������
PUSH PSW
PUSH ACC
MOV TL0,20H
MOV TH0,21H
CPL P1.3
POP ACC
POP PSW
RETI
DELAY: ;R5��ֵ�����������ʱ��
MOV R7,#02
DELAY0:
MOV R4,#187
DELAY1:
MOV R3,#248
DJNZ R3,$
DJNZ R4,DELAY1
DJNZ R7,DELAY0
DJNZ R5,DELAY
RET
TABLE:
DB 82H,01H,81H,94H,84H,0B4H,0A4H,04H
DB 82H,01H,81H,94H,84H,0C4H,0B4H,04H
DB 82H,01H,81H,0F4H,0D4H,0B4H,0A4H,94H
DB 0E2H,01H,0E1H,0D4H,0B4H,0C4H,0B4H,04H
DB 82H,01H,81H,94H,84H,0B4H,0A4H,04H
DB 82H,01H,81H,94H,84H,0C4H,0B4H,04H
DB 82H,01H,81H,0F4H,0D4H,0B4H,0A4H,94H
DB 0E2H,01H,0E1H,0D4H,0B4H,0C4H,0B4H,04H,00H
TABLE1:
DW 64260,64400,64524,64580,64684,64777,64820,64898
DW 64968,65030,65058,65110,65157,65178,65217
END
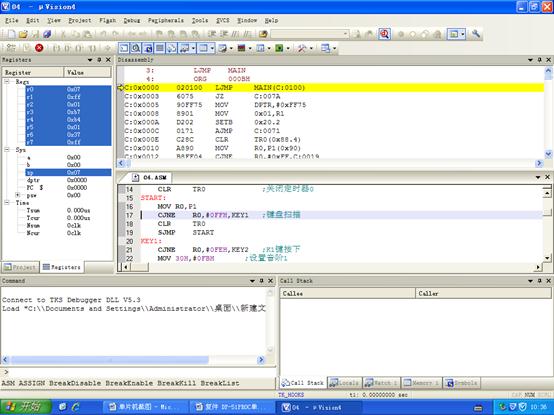
��keil�ϱ༭��Ľ�ͼ��

����ú��������;��棺

���غ�

������ͼ3���غ�Ϳ��Է���ף�����տ��ֵ�������
ʵ���ܽ
�༭Դ������ע�⽫ָ���е�
ORG 8000H
JMP MAIN
ORG 800BH
JMP INTT0
ORG 8100H
�ijɣ�ORG 0000H
JMP MAIN
ORG 000BH
JMP INTT0
ORG 0100H
��keil�ϱ༭����ʱҪѡ���ļ��ı������Ժ�.ASM ���д����������С�ʵ����ֻҪһ�����߽�A2����P13��B5���� BUZZ������������
����ʵ��������֪������ͨ����Ƭ�������л�������ʵ���ض��Ĺ������÷�����ѭ������ף�����տ��ֵ�������
ʵ��� ������ʵ��
һ�� ʵ��Ŀ��
����ʵ�������ṩ�İ���K1~K7��Ϊ�����ٰ��������Ʒ�����������ʹ�û��˽���������ԭ������Ϥ��ʱ���ͼ���ɨ���·�Ĺ���ԭ������̷�����
���� ʵ���豸������
IBM PC �� һ̨
DP-51PROC��Ƭ���ۺϷ���ʵ���� һ̨
Ƶ�ʼ� һ̨
���� ʵ������
1�� ��дһ�γ�����P3.3�ڿ���(���7�����ױ��Ƶ�ʵķ���)��ʹB5���ķ�����������ͬ�������������ⰴ����״̬����ijһ������ʱ��������������Ӧ��������
2�� ���ո�����������ʹ��D1���İ���K1~K7������һ�����֡�
�ģ� ʵ�鲽��
1�� �õ��߽�A2��P3.3�ڣ�INT1����B5����BUZZ�ӿ�������Ȼ��D1����J53�ӿں�A2����J61�ӿ�һһ��Ӧ��������ͼ3.4��ʾ��
ͼ3.4 ʵ��5ԭ��ͼ
2�� ��д�����Ķ�̬����ɨ�����,���ݲ�ͬ����Ƶ�ʱ�д���������������Ƴ���,Ȼ����ɵ����ٵ���������ơ�
3�� ���Ա�д�õij���,ʹ��Ƶ�ʼ�У����Ƶ��,Ȼ��ʹ�ü�������һ�κ��������֡�
ʵ���ĺ����
BUZZ EQU P3.3 ;�˿ڶ���
ORG 0000H
LJMP MAIN
ORG 000BH
LJMP INT_T0
ORG 0100H
MAIN:
MOV SP,#60H ;��ʼ����ջָ��
MOV P1,#0FFH ;����P1��Ϊ����ģʽ
MOV TMOD,#01H ;���ö�ʱ��0Ϊ����ģʽ1
SETB ET0 ;����ʱ��0�ж�
SETB EA ;�����ж�
CLR TR0 ;�رն�ʱ��0
START:
MOV R0,P1
CJNE R0,#0FFH,KEY1 ;����ɨ��
CLR TR0
SJMP START
KEY1:
CJNE R0,#0FEH,KEY2 ;K1������
MOV 30H,#0FBH ;��������1
MOV 31H,#0E9H
LJMP SET_TIMER
KEY2:
CJNE R0,#0FDH,KEY3;K2������
MOV 30H,#0FCH ;��������2
MOV 31H,#5CH
LJMP SET_TIMER
KEY3:
CJNE R0,#0FBH,KEY4;K3������
MOV 30H,#0FCH ;��������3
MOV 31H,#0C1H
LJMP SET_TIMER
KEY4:
CJNE R0,#0F7H,KEY5 ;K4������
MOV 30H,#0FCH ;��������4
MOV 31H,#0EFH
LJMP SET_TIMER
KEY5:
CJNE R0,#0EFH,KEY6 ;K5������
MOV 30H,#0FDH ;��������5
MOV 31H,#045H
LJMP SET_TIMER
KEY6:
CJNE R0,#0DFH,KEY7;K6������
MOV 30H,#0FDH ;��������6
MOV 31H,#92H
LJMP SET_TIMER
KEY7:
CJNE R0,#0BFH,NOKEY;K7������
MOV 30H,#0FDH ;��������7
MOV 31H,#0D6H
SET_TIMER:
SETB TR0 ;����
SJMP START
NOKEY:
CLR TR0 ;������
SJMP START
INT_T0: ;T0�жϷ������
MOV TH0,30H ;��ʱ������ֵ
MOV TL0,31H
CPL BUZZ ;�������
RETI
;
END

����ú��������;��棺

���ص���Ƭ���Ϻ�㿪ʼ��
��ʼ��ֱ𰴰���K1~K7�Ϳ��Է���7�����ס�
ʵ���ܽ
���ȱ�дԴ����ʱҪ��
BUZZ EQU P3.3 ;�˿ڶ���
ORG 8000H
LJMP MAIN
ORG 800BH
LJMP INT_T0
ORG 8100H
�ijɣ�
BUZZ EQU P3.3 ;�˿ڶ���
ORG 0000H
LJMP MAIN
ORG 000BH
LJMP INT_T0
ORG 0100H
���ú��ʵĵ�ַ������ȷ�����С�
���ӵ���ʱҪע���õ��߽�A2��P3.3�ڣ�INT1����B5����BUZZ�ӿ�������Ȼ��D1����J53�ӿں�A2����J61�ӿ�һһ��Ӧ���������Ӻú���k1~K 7�İ������ܷ���7��������֤��ʵ��ɹ��������Ǹ��õ������˵�Ƭ���Ĺ��ܡ�
ʵ���� ֱ��������Ƶ�·���
һ ���Ŀ��
1�����յ�Ƭ����PWMʵ��ֱ����������Ļ�������������ֱ�����������ԭ������
2��ѧϰģ�����ֱ�������ת����ת�����١����ٵ�ʵ�ַ�����
�� ���Ҫ��
����ѧ��֪ʶ���51��Ƭ�����һ��������ת����ת������˶���ֱ��������Ƶ�·������ʾ�����۲���ģ��仯״����
�� ���˼·��ԭ��
PWM����������·���£�
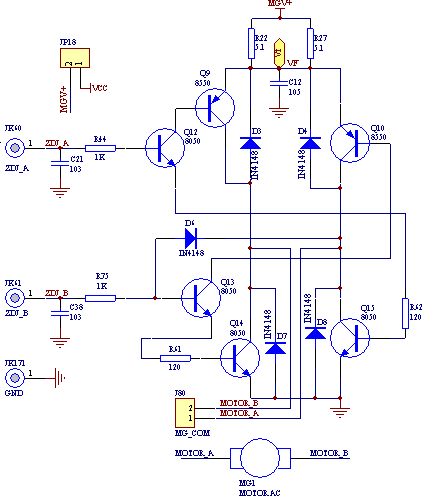
ͼ3.34 ֱ���������ԭ��ͼ
ԭ��ͼ��ͼ3.34��ֻҪZDJ_A�ĵ�ѹ��ZDJ_B�ĵ�ѹ�ߣ������ת�����ZDJ_B�ĵ�ѹ��ZDJ_A�ߣ������ת��
���õ�Ƭ����PWM�źŵ�����ʵ�ַ�����MCSһ51ϵ�е��Ͳ�Ʒ8051����������ʱ����������ΪPWM�ź�����ʵ�ֵĺ����ǵ�Ƭ���ڲ��Ķ�ʱ��������ͨ�����ƶ�ʱ��������ֵ���Ӷ�����ʵ�ִ�8051����������������ͬռ�ձȵ����岨�Ρ��Ӷ�ʵ�ֶ�ֱ���綯����ת�ٿ��ơ�
��AT89C51��P1.0��P1.2����ֱ������Ŀ졢����ת�͵�ƽ��Ч��P3.0ΪPWM�������P3.1Ϊת����������P3.2Ϊ��������PWM����DC���ת�٣�����Ϊ12M�����ö�ʱ�����Ʋ���ռ�ձȿɱ��PWM������K1����PWMֵ���ӣ���ռ�ձ����ӣ����ת�죬��K2����PWMֵ���٣���ռ�ձȼ�С�����ת������PWMֵ���ӵ����ֵ255������Сֵ1ʱ��������������
�� ʵ������
DVCC������ ������ ��Դ������ PROTUES�������� KRIL����
�� ʵ�����������
#include < reg51.h > sbit K1 =P1^0 ���Ӽ�
sbit K2 =P1^1 ���ټ�
sbit K3 =P1^2 ת��ѡ���
sbit PWMUOT =P3^0 PWM�����
sbit turn_around =P3^1 ת�������� s
bit BEEP =P3^2 ������
unsigned int PWM; void Beep(void);
void delay(unsigned int n); void main(void) {
TMOD=0x11; //����T0��T1Ϊ��ʽ1����16λ��ʱ����
TH0=0 65536us��ʱ����{t=(65536-TH)/fose/12} TL0=0;
TH1=PWM //�������ڣ���8λ TL1=0;
EA=1; //�����ж�
ET0=1; //��T0�ж�
ET1=1; //��T1�ж� TR0=1 // T0��ʱ����
while(1) {
if(K3==0&&K1==1&&K2==1) // ת��
{
turn_around=!turn_around; }
while(K3==0); //���K3�Ƿ��ͷ�
do{
PWM++
if(PWM>0xfe)//��ֹPWMS�������
{
PWM=0xff; }
if(PWM==0xff)Beep() �� delay(3000);
}
while(K1==0&&K2==1);
do{
PWM-- if(PWM<1)
{
PWM=1; }
if(PWM==1)Beep() delay(3000); }
while(K1==1&&K2==0); } }
void timer0() interrupt 1 using 2 // ��ʱ��0�жϷ������ {
TR1=0 //T1��ֹ TH0=0 //��T0��ʱ���� TL0=0
TH1=PWM //��T1��ʱ���� TL1=0;
TR1=1 //T1���� PWMUOT=0 // PWM�����0 }
void timer1() interrupt 3 using 3 //��ʱ��1�жϷ������
{
TR1=0 //T1��ֹ PWMUOT=1 //PWM�����1 }
void Beep(void) //�������ӳ��� {
unsigned char i; for (i=0;i<100;i++) {
delay(100);
BEEP=!BEEP; }
BEEP=1; delay(100); }
void delay(unsigned int n) {
while(n--) ; }
�� Proteus�����ͼ

�� ʵ����
�˴�����ͨ������ϵͳ�����˷��棬������Ӧ�Ŀ��أ���ʵ�ֿ���ֱ������ļ��١����ټ�ת��
�� ʵ��������ĵ�
ͨ����������Ƽ����У�ʵ��ﵽ��Ԥ�ڵĽ����ʵ���˵������ת����ת�����ٺͼ�����ơ���ƹ����������˺ܶ�����⣬��������û�а�;���ϣ������˶�֪ʶ�����⣬һ��һ��ķ������ܶ���֮����ογ�������������dz���������������Ƶ�·ʹ֮ʵ�����蹦�ܵĹ����У��������ҵ����˼ά��������ʵ�ʲ���������Ҳ���������ᵽ���Լ�ѧϰ֪ʶ�IJ���֮��������֪ʶ������̶Ȳ�����Լ���Ϊ����ʵ���ϲ����ס����Ժ��ѧϰ�����У��һ�������Щ���⣬�ı��Լ���ѧϰϰ�ߣ����ϵĽ�����
ʵ���� 16×16 LEDɨ�����ʵ��
һ�� ʵ��Ŀ��
ʹ�û�ѧ�����õ�Ƭ����IO�ڽ���LED�����ɨ����ʾ��
���� ʵ���豸������
IBM PC �� һ̨
DP-51PROC��Ƭ���ۺϷ���ʵ���� һ̨
���� ʵ������
��дһ�γ�����P1�ڿ���C3��4Ƭ74HC164��������ɨ�裬ʹC3����16×16 LED������ʾ�û�ָ���ĺ��֡�
�ģ� ʵ��Ҫ��
ѧ��ʹ�õ�Ƭ����LED�������ɨ����ʾ��
�壮 ʵ�鲽��
1. ʹ�õ��߽�A2����P10~P14��C3����L_DAT_H��L_DAT_L��L_CLK��L_OE��L_STR�������ӡ�
2. ���й����еij�����ʾ����л��ʹ��DP-51PROC��Ƭ���ۺϷ���ʵ���ǣ�������������������������Ϲ���
3. ����û�ϣ���ı���ʾ�ĺ��֣�����ʹ�ù����и�������ģ��ȡ����(Pctolcd2002)��ȡ�û�ϣ����ʾ���ֵ���ģ����ģ��ȡ����������Ϊ���롢����ʽ������ʮ�����ơ�C51��ʽ�Զ��壬�����ɵ���ģ��������������ָ����λ�ò��뼴�ɡ�
���� ʵ��ԤϰҪ��
�Ķ������2.8.19�����ݣ�����Ӳ���ṹ���������Ȱѳ����ã�Ȼ����Keil C51�����½����������档
�ߣ� ʵ��ο�����
#include <reg52.h>
typedef unsigned char byte;
typedef unsigned int word;
sbit datah595=P1^0;
sbit datal595=P1^1;
sbit clk595=P1^2;
sbit oe595=P1^3;
sbit str595=P1^4;
word data datah,datal;
byte code displaydata[]=
{
0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
//������λ�ò�����ģ
0x00,0x04,0x00,0x43,0xFC,0x70,0x14,0x00,0xD4,0x39,0x54,0x41,0x54,0x41,0xD4,0x49,
0x04,0x50,0x3F,0x42,0xC4,0x41,0x45,0x61,0x36,0x0A,0x04,0x34, 0x00,0x27,0x00,0x00,/*"��",0*/
0x40,0x00,0x42,0x00,0xCC,0x3F,0x04,0x50,0x00,0x29,0xFC,0x11,0x56,0x4D,0x55,0x83,
0xFC,0x7F,0x50,0x00,0x90,0x41,0x10,0x80,0xFF,0x7F,0x10,0x00, 0x10,0x00,0x00,0x00,/*"л",1*/
0x80,0x00,0x40,0x20,0x30,0x38,0xFC,0x03,0x03,0x38,0x90,0x40,0x68,0x40,0x06,0x49,
0x04,0x52,0xF4,0x41,0x04,0x40,0x24,0x70,0x44,0x00,0x8C,0x09, 0x04,0x30,0x00,0x00,/*"��",2*/
0x40,0x00,0x20,0x00,0xF0,0x7F,0x1C,0x00,0x07,0x40,0xF2,0x41,0x94,0x22,0x94,0x14,
0x94,0x0C,0xFF,0x13,0x94,0x10,0x94,0x30,0x94,0x20,0xF4,0x61, 0x04,0x20,0x00,0x00,/*"ʹ",3*/
0x00,0x80,0x00,0x40,0x00,0x30,0xFE,0x0F,0x22,0x02,0x22,0x02,0x22,0x02,0x22,0x02,
0xFE,0xFF,0x22,0x02,0x22,0x02,0x22,0x42,0x22,0x82,0xFE,0x7F, 0x00,0x00,0x00,0x00,/*"��",4*/
0x08,0x20,0xF8,0x3F,0x08,0x20,0x08,0x20,0x08,0x20,0x10,0x10,0xE0,0x0F,0x00,0x00,/*"D"*/
0x08,0x20,0xF8,0x3F,0x08,0x21,0x08,0x01,0x08,0x01,0x08,0x01,0xF0,0x00,0x00,0x00,/*"P", 5*/
0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,
0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,/*"��",6*/
0x00,0x00,0xF8,0x19,0x08,0x21,0x88,0x20,0x88,0x20,0x08,0x11,0x08,0x0E,0x00,0x00,/*"5"*/
0x00,0x00,0x10,0x20,0x10,0x20,0xF8,0x3F,0x00,0x20,0x00,0x20,0x00,0x00,0x00,0x00,/*"1", 7*/
0x08,0x20,0xF8,0x3F,0x08,0x21,0x08,0x01,0x08,0x01,0x08,0x01,0xF0,0x00,0x00,0x00,/*"P"*/
0x08,0x20,0xF8,0x3F,0x88,0x20,0x88,0x00,0x88,0x03,0x88,0x0C,0x70,0x30,0x00,0x20,/*"R", 8*/
0xE0,0x0F,0x10,0x10,0x08,0x20,0x08,0x20,0x08,0x20,0x10,0x10,0xE0,0x0F,0x00,0x00,/*"O"*/
0xC0,0x07,0x30,0x18,0x08,0x20,0x08,0x20,0x08,0x20,0x08,0x10,0x38,0x08,0x00,0x00,/*"C", 9*/
0x00,0x08,0x00,0x08,0xF8,0x0B,0x28,0x09,0x29,0x09,0x2E,0x09,0x2A,0x09,0xF8,0xFF,
0x28,0x09,0x2C,0x09,0x2B,0x09,0x2A,0x09,0xF8,0x0B,0x00,0x08, 0x00,0x08,0x00,0x00,/*"��",10*/
0x00,0x80,0x00,0x40,0x00,0x30,0xFE,0x0F,0x10,0x01,0x10,0x01,0x10,0x01,0x10,0x01,
0x10,0x01,0x1F,0x01,0x10,0x01,0x10,0xFF,0x10,0x00,0x18,0x00, 0x10,0x00,0x00,0x00,/*"Ƭ",11*/
0x08,0x04,0x08,0x03,0xC8,0x00,0xFF,0xFF,0x48,0x00,0x88,0x41,0x08,0x30,0x00,0x0C,
0xFE,0x03,0x02,0x00,0x02,0x00,0x02,0x00,0xFE,0x3F,0x00,0x40, 0x00,0x78,0x00,0x00,/*"��",12*/
0x20,0x22,0x30,0x23,0xA8,0x22,0x67,0x12,0x32,0x12,0x00,0x20,0x0C,0x11,0x24,0x0D,
0x24,0x41,0x25,0x81,0x26,0x7F,0x24,0x01,0x24,0x05,0x24,0x09, 0x0C,0x31,0x00,0x00,/*"��",13*/
0x40,0x00,0x40,0x00,0x20,0x00,0x50,0x7E,0x48,0x22,0x44,0x22,0x42,0x22,0x41,0x22,
0x42,0x22,0x44,0x22,0x68,0x22,0x50,0x7E,0x30,0x00,0x60,0x00, 0x20,0x00,0x00,0x00,/*"��",14*/
0x40,0x00,0x20,0x00,0x10,0x00,0xEC,0x7F,0x07,0x40,0x0A,0x20,0x08,0x18,0x08,0x06,
0xF9,0x01,0x8A,0x10,0x8E,0x20,0x88,0x40,0x88,0x20,0xCC,0x1F, 0x88,0x00,0x00,0x00,/*"��",15*/
0x00,0x10,0x04,0x90,0x04,0x90,0x04,0x50,0xF4,0x5F,0x54,0x35,0x5C,0x15,0x57,0x15,
0x54,0x15,0x54,0x35,0x54,0x55,0xF4,0x5F,0x04,0x90,0x06,0x90, 0x04,0x10,0x00,0x00,/*"��",16*/
0x00,0x00,0x10,0x82,0x0C,0x82,0x04,0x42,0x4C,0x42,0xB4,0x23,0x94,0x12,0x05,0x0A,
0xF6,0x07,0x04,0x0A,0x04,0x12,0x04,0xE2,0x14,0x42,0x0C,0x02, 0x04,0x02,0x00,0x00,/*"ʵ",17*/
0x02,0x08,0xFA,0x08,0x82,0x04,0x82,0x24,0xFE,0x40,0x80,0x3F,0x40,0x22,0x60,0x2C,
0x58,0x21,0x46,0x2E,0x48,0x20,0x50,0x30,0x20,0x2C,0x20,0x23, 0x20,0x20,0x00,0x00,/*"��",18*/
0x40,0x00,0x20,0x00,0xF0,0xFF,0x0C,0x00,0x03,0x40,0x00,0x40,0x38,0x20,0xC0,0x10,
0x01,0x0B,0x0E,0x04,0x04,0x0B,0xE0,0x10,0x1C,0x20,0x00,0x60, 0x00,0x20,0x00,0x00,/*"��",19*/
0x00,0x00,0x00,0x00,0x00,0x00,0xF0,0x5F,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,/*"��",20*/
//������ģ�������
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00
};
byte *p=&displaydata[0];
byte *q=&displaydata[32];
void delay(word a)
{
word b;
for(b=0;b<a;b++);
}
void senddata(word datah,datal)
{
byte i=0;
word m,n;
oe595=0;
str595=0;
for(;i<16;i++)
{
clk595=0;
m=datah;
n=~datal;
m&=0x8000;
n&=0x8000;
datah595=(bit)m;
datal595=(bit)n;
datah<<=1;
datal<<=1;
clk595=1;
}
str595=1;
str595=0;
}
void horizontal(byte time,word counth) //ˮƽ�ƶ��ӳ���
{
byte x,y;
word j,k,z;
for(z=0;z<counth;z++)
{
for(y=0;y<time;y++)
{
datal=0x0001;
for(x=0;x<16;x++)
{
p+=3;
j=(word)*p;
j<<=8;
j&=0xff00;
p-=1;
k=(word)*p;
k&=0x00ff;
datah=j|k;
if(x)
{
datal<<=1;
}
//datah=~datah; senddata(datah,datal);
}
p-=32;
}
p+=2;
}
p=&displaydata[0];
oe595=1;
}
void vertical(byte a,time,word countv) //��ֱ�ƶ��ӳ���
{
byte x,y,e,w=0;
word j,k,z;
word datah1,datah2;
for(z=countv;z>0;z--)
{
for(e=0;e<16;e++)
{
for(y=0;y<time;y++)
{
datal=0x0001;
for(x=0;x<16;x++)
{
p+=3;
j=(word)*p;
j<<=8;
j&=0xff00;
p-=1;
k=(word)*p;
k&=0x00ff;
datah1=j|k;
datah1>>=w;
q+=3;
j=(word)*q;
j<<=8;
j&=0xff00;
q-=1;
k=(word)*q;
k&=0x00ff;
datah2=j|k;
datah2<<=(16-w);
datah=datah1|datah2;
if(x)
{
datal<<=1;
}
//datah=~datah;
senddata(datah,datal);
}
p-=32;q-=32;
}
w++;
if(w==16) w=0;
}
if((a==16)&&(z==2))
{ p+=32;q+=16; }
else
{ p+=32;q+=32; }
}
p=&displaydata[0];
q=&displaydata[32];
oe595=1;
}
void main(void)
{
byte time=8;
word size=sizeof(displaydata);
word countv=((size-2)>>5)-1;
word counth=countv<<4;
byte a=(byte)((size-2)%32);
if(a==16)
{
counth+=8;
countv+=1;
}
while(1)
{
horizontal(time,counth);
delay(65535);
delay(65535);
vertical(a,time,countv);
delay(65535);
delay(65535);
}
}
ʵ���岽�����ʵ��
һ��ʵ��Ŀ��
�˽ⲽ������Ĺ���ԭ������������ת�����Ʒ�ʽ�͵��ٷ�����
���� ʵ���豸������
IBM PC �� һ̨
DP-51PROC��Ƭ���ۺϷ���ʵ���� һ̨
���� ʵ������
1. ��д����ͨ����Ƭ����P1�ڿ��Ʋ�������Ŀ��ƶˣ�ʹ�䰴һ���Ŀ��Ʒ�ʽ����ת����
2. �ֱ����˫���ģ�AB��BC��CD��DA��AB����ʽ�������ģ�A��B��C��D��A����ʽ�͵�˫���ģ�A��AB��B��BC��C��CD��D��DA��A����ʽ��̣����Ʋ��������ת�������ת�١�
3. �۲첻ͬ���Ʒ�ʽ�£��������ת��ʱ��������Ͳ����ǵĴ�С���Ƚ��⼸�ֿ��Ʒ�ʽ����ȱ�㡣
�ģ� ʵ��Ҫ��
ѧ�Ჽ������Ĺ���ԭ���Ϳ��Ʒ���������һЩ�Ŀ��Ƶ�·�ͻ����ĵ������֪ʶ��

ͼ3.35 �����������ԭ��ͼ
�壮 ʵ�鲽��
1. ��װC10��JP6�ӿ��ϵĶ�·ñ����C10��BA��BB��BC��BD��A2����P10~P13��Ӧ������
2. ��������������������б�д�õ��������۲첽�������ת�������
3. �IJ�������Ŀ��Ƴ����ٴ����г��Ƚ����ǵIJ�ͬ����Ч����
���� ʵ��ο�����
5�� ����
#include"reg51.h"
#define uint unsigned int
//#define delay_ms 5 //��ʱ
sbit W=P3^6;
sbit R=P3^7;
sbit SEND=P3^0;
sbit CLOCK=P3^1;
int delay_ms=30;
sbit bu1=P1^4;
sbit bu2=P1^5;
sbit bu3=P1^6;
sbit bu4=P1^7;
uint flag=0;
unsigned int table[]={0x03,0x9F,0x25,0x0D,0x99,0x49,0x41,0x1F,0x01,0x09,0xff};
uint h=0;
void delay(uint n) //��ʱ����
{
uint i,j;
for(i=0;i<100;i++)
for(j=0;j<n;j++);
}
void zhengzhuan() //��ת
{
bu1=~bu1;
delay(delay_ms);
bu1=~bu1;
bu2=~bu2;
delay(delay_ms);
bu2=~bu2;
bu3=~bu3;
delay(delay_ms);
bu3=~bu3;
bu4=~bu4;
delay(delay_ms);
bu1=~bu1;
}
void fanzhuan() //��ת
{
bu4=~bu4;
delay(delay_ms);
bu4=~bu4;
bu3=~bu3;
delay(delay_ms);
bu3=~bu3;
bu2=~bu2;
delay(delay_ms);
bu2=~bu2;
bu1=~bu1;
delay(delay_ms);
bu1=~bu1;
}
void senddata(unsigned int dat) //�������ݳ���
{
unsigned int i=0;
for(;i<8;i++)
{
CLOCK=0;
SEND=dat>>i&1;
;
CLOCK=~CLOCK;
}
}
uint saomiao() //����ɨ�����
{
uint i,j,k1,k2=0x01,n;
uint A[]={0xfe,0xfd,0xfb,0xf7};
for(i=0;i<4;i++)
{
k2=0x01;
W=0;
P2=0x60;
P0=A[i];
delay(1);
W=1;
P2=0xA0;
W=0;
// k1=P0&0x0f;
// if(k1!=0x0f)
// {
for(j=0;j<4;j++)
{
n=P0&0x0F;
if(!(n&k2))
{
return(4*i+j);
}
k2<<=1;
}
// }
}
delay(100);
return(10) ;
}
void main()
{
uint m,r;
// W=0;
// P2=0x60;
// P0=0x00;
// ;
// W=1; //����P0���������
// P2=0xA0;
// W=0;
while(1)
{
W=0;
P2=0x60;
P0=0xf0;
W=1; //����P0���������
P2=0xA0;
W=0;
m=P0&0x0F;
if(m!=0x0f)
{
delay(50);
m=P0&0x0f;
if(m!=0x0f)
{
// flag=!flag;
// switch(flag)
// {
// case 0: zhengzhuan();
// break;
// case 1: fanzhuan();
// break;
// default : ;
// }
h=saomiao();
senddata(table[h]);
}
}
r=h;
if(r==1)
{
zhengzhuan();
}
if(r==2)
{
fanzhuan();
}
if(r==5)
{delay_ms+=5;
if(delay_ms>100)delay_ms=200;
}
if(r==4)
{delay_ms-=5;
if(delay_ms<=5)
{
delay_ms= 5;
}
}
}
}
ʵ���ĵã�
20����ĩ�����Ӽ�������˷��ٵķ�չ�������ƶ��£��ִ����Ӳ�Ʒ�����������ĸ��������������ƶ�������������ķ�չ�������Ϣ���̶ȵ���ߣ�ͬʱҲʹ�ִ����Ӳ�Ʒ���ܽ�һ����ߣ���Ʒ���»����Ľ���ҲԽ��Խ��
���������һ�ֽ��������ź�ת������Ӧ�Ľ�λ�ƣ�����λ�ƣ��ĵ�Ż�еװ��[1]�����ڱȽϳ��õIJ������������Ӧʽ���������VR��������ʽ���������PM�������ʽ���������HB���ȡ�
����ʵ��������أ�Դ����ı�д�Ƚ��鷳�����Զ��Ҳû�еó�����Ľ����
��������IJ����������ϵͳ����������ڹ���Ƶ��������ƽ�ȣ���λ���ȸߡ���ϵͳ��Ч��ʵ�ã��������˻�����ϵͳ�еõ���֤�������Ч���С�
-
��Ƭ��ԭ����Ӧ��ʵ�鱨��
��Ƭ��ԭ����Ӧ��ʵ�鱨��һѡ������2����Ƭ��AT89C52�ṹ����2��ʵ������3��ʵ�鲽��3����uvision�����������������4��
-
MCS51��Ƭ��ԭ����Ӧ�� ʵ�鱨��
��Ƭ��ԭ����Ӧ��ʵ�鱨��ѧУ�Ϸʹ�ҵ��ѧ����������ѧ��20xx2606�༶�������ѧ�뼼��0803��1Ŀ¼ǰ��3��һ��MC51��Ƭ��
-
��Ƭ��ԭ��ʵ�鱨��
���ֺ��칤ҵѧԺ���ӹ���ϵ20xx20xxѧ���רҵ�༶ѧ������ͬ����ָ����ʦ����һ��Ƭ�����Ƶ�������һʵ��Ŀ��1����ѧ��ʹ��Ke��
-
��Ƭ��ԭ����Ӧ��ʵ�鱨��
ʵ��γ̵�Ƭ��ԭ����Ӧ��ʵ����Ŀ��Ƭ������LED������רҵ�༶ѧ������ʵ������ʵ��һ��Ƭ������LED��ʵ��һʵ��Ŀ��1��һ������K��
-
��Ƭ��ԭ����Ӧ��ʵ�鱨��
��Ƭ��ԭ����Ӧ��ʵ�鱨����ʦѧ��רҵ�������̼����Զ���ѧԺ����ѧԺѧ��ʵ��һ������ʵ��һʵ��Ŀ�����õ�Ƭ����P1����IO��ʹ�û�ѧ��
- ��Ƭ��ԭ����Ӧ�ÿγ���Ʊ���
-
��Ƭ��ԭ��ʵ�鱨��
��Ƭ��ԭ����Ӧ��ʵ�鱨��רҵ20xx���������ѧ�뼼��Ƕ��ʽӦ�ü���ѧ�������Ϸ�ʦ��ѧԺʵ�鱨������������γ����Ƶ�Ƭ��ԭ����Ӧ�á�
-
��Ƭ��ԭ����Ӧ�ü���ʵ�鱨��(ʵ����Ŀ����ʱ��)
��ѧ�������ѧϵʵ�鱨��רҵ�������ѧ�뼼���༶ʵ��γ̵�Ƭ��ԭ����Ӧ�ü�������ѧ��ʵ����Ӳ��ʵ����ͬ��ͬѧʵ��ʱ��20xx��3�¡�
-
MCS51��Ƭ��ԭ����Ӧ�� ʵ�鱨��
��Ƭ��ԭ����Ӧ��ʵ�鱨��ѧУ�Ϸʹ�ҵ��ѧ����������ѧ��20xx2606�༶�������ѧ�뼼��0803��1Ŀ¼ǰ��3��һ��MC51��Ƭ��
-
��Ƭ��ԭ����Ӧ�� �γ���Ʊ�����
��Ƭ��ԭ����Ӧ�ÿγ���Ʊ�������Ŀ���ֵ�ѹ������������ŵ���ѧ��103521034רҵ�������̼����Զ���ָ����ʦ������ʦ���ʱ��2��