电机调速实验报告
重庆邮电大学综合实验报告
C51单片机控制的直流电机PWM调速实验
姓 名: 魏 敏
学 号: 2012213148
班 级: 0881202
组 号:
专 业:电气工程与自动化
指导老师: 陈 俊 华
自动化学院检测与控制实验中心
20##
一、实验目的
1.掌握脉宽调制 (PWM) 的方法。
2.用程序实现脉宽调制,并对直流电机进行调速控制。
二、实验原理
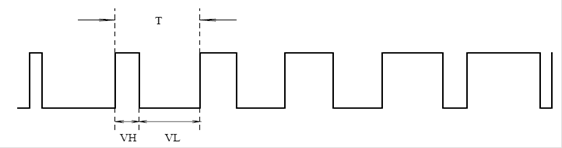
1.PWM (Pulse Width Modulation) 简称脉宽调制。即,通过改变输出脉冲
的占空比,实现对直流电机进行调压调速控制。
2.实验线路图:
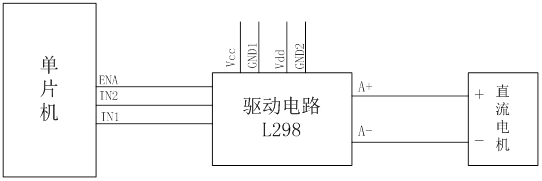
三、实验内容
1. 利用实验室提供的单片机应用系统及直流电机驱动电路板,编制控制程序,实现直流电机PWM调速控制。
程序设计:
#include<reg51.h>
#define uchar unsigned char
sbit wela=P2^7; sbit dula=P2^6; sbit k1=P3^4;
sbit k2=P3^5; sbit k3=P3^6; sbit in1=P1^0;
sbit in2=P1^1; sbit ena=P1^2; uchar x,y,x1,y1;
uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
void delay(int z);
void keyscan();
void display_time();
void Timer0_Init()
{
TMOD=0X01;
TH0=(65536-500)/256;
TL0=(65536-500)%256;
EA=1; ET0=1; TR0=1;
}
void main()
{
Timer0_Init();
ena=1; x=89; y=50;
x1=100; y1=100; in1=1;
in2=0; while(1)
{
display_time(); keyscan();
}
}
void delay(int z)
{ int x,y;
for(x=z;x>0;x--)
for(y=11;y>0;y--);
}
void keyscan()
{ if(k1==0)
{ while(k1==0); x=x+1;
if(x>=99) x=99;
}
if(k2==0)
{ while(k2==0); x=x-1;
if(x<= 1) x= 1;
}
if(k3 == 0)
{
delay(15); while(!k3);
in1=~in1; in2=~in2;
}
}
void display_time()
{
P0=0x00;
dula=1; P0=table[x%10]; dula=0;
P0=0xff;
wela=1; P0=0xdf; wela=0;
delay(1);
P0=0x00;
dula=1; P0=table[x/10]; dula=0;
P0=0xff;
wela=1; P0=0xef; wela=0;
delay(1); P0=0x00;
dula=1; P0=table[0]; dula=0;
wela=1; P0=0xf7; wela=0;
delay(1); P0=0x00;
dula=1; P0=table[0]; dula=0;
wela=1; P0=0xfb; wela=0;
delay(1);
}
void T0_time()interrupt 1
{
TR0=0;
TH0=(65536-500)/256; //高四位
TL0=(65536-500)%256; //低四位
y--; if(y==0)
{
ena=0; y=1;
}
y1--; if(y1==0)
{
ena=1; y1=100; y=x;
}
TR0=1;
}
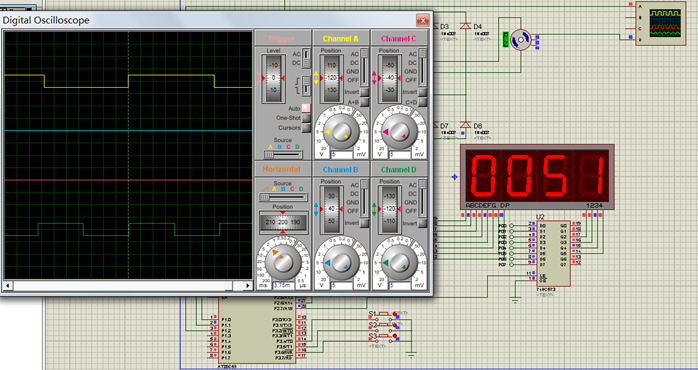
原理图设计:


四、总结
最后一次实验,虽然还不能够自己完完整整的编好一个程序,但通过这几次的实验,我能够看懂同学写出的程序,并在一定的基础上举一反三。通过这次试验我学会了改变占空比来调整电机的转速,经过思考,我觉得还可以增加滑动变阻器,通过改变电阻影响电流来调整电机转速。最后,课程学习结束,在老师和同学的帮助下,我学到了很多,接下来,我也会继续努力。
第二篇:计算机控制实验报告4(电机调速实验)
班级: 座号: 姓名 成绩:
课程名称:计算机控制技术实验项目:电机调速实验
实验预习报告(上课前完成)
一、实验目的
1.了解直流电机调速系统的特点。
2.研究采样周期T对系统特性的影响。
3.研究电机调速系统PID控制器的参数的整定方法。
二、实验仪器
1.EL-AT-II型计算机控制系统实验箱一台
2.PC计算机一台
3.直流电机控制实验对象一台
三、控制的基本原理

1.系统结构图示于图8-1。
图8-1 系统结构图
图中 Gc(s)=Kp(1+Ki/s+Kds)
Gh(s)=(1-e-TS)/s
Gp(s)=1/(Ts+1)
2.系统的基本工作原理
整个电机调速系统由两大部分组成,第一部分由计算机和A/D&D/A卡组成,主要完成速度采集、PID运算、产生控制电枢电压的控制电压,第二部分由传感器信号整形,控制电压功率放大等组成。电机速度控制的基本原理是:通过D/A输出-2.5v~+2.5v的电压控制7812的输出,以达到控制直流电机电枢电压的目的。速度采集由一对红外发射、接收管完成,接收管输出脉冲的间隔反应了电机的转速。
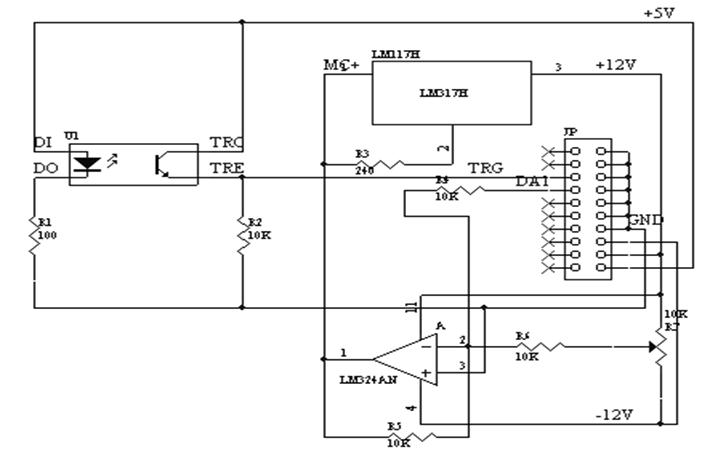
第二部分电路原理图
3.PID递推算法 :
如果PID调节器输入信号为e(t),其输送信号为u(t),则离散的递推算法如下:
Uk=Kpek+Kiek2+Kd(ek-ek-1)
其ek2是误差累积和。
四、实验内容:
1、设定电机的速度在一恒定值。
2、调整P、I、D各参数观察对其有何影响。
五、实验步骤
1.启动计算机,在桌面双击图标 [Computerctrl]或在计算机程序组中运行[Computerctrl]软件。
2. 测试计算机与实验箱的通信是否正常,通信正常继续。如通信不正常查找原因使通信正常后才可以继续进行实验。
3. 20芯的扁平电缆连接实验箱和炉温控制对象,检查无误后,接通实验箱电源。
开环控制
4. 选中[实验课题→电机调速实验→开环控制实验]菜单项,鼠标单击将弹出参数设置窗口。在参数设置窗口设置给定电压,及电机控制对象的给定转速,点击确认在观察窗口观测系统响应曲线。测量系统响应时间Ts和超调量sp。
5. 复步骤4,改变参数设置,观测波形的变化,记入表1
闭环控制
6.选中[实验课题→电机调速实验→闭环控制实验]菜单项,鼠标单击将弹出参数设置窗口。在参数设置窗口设置电机控制对象的给定温度以及Ki、Kp、Kd值,点击确认在观察窗口观测系统响应曲线。测量系统响应时间Ts和超调量sp。
7.重复步骤6,改变PID参数,观测波形的变化,记入表2
实验报告部分

表1

表2
-
直流电动机实验报告
电机实验报告课程名称电机实验指导老师成绩实验名称直流并励电动机实验类型同组学生姓名一实验目的和要求1掌握用实验方法测取直流并励电机…
-
直流电机PWM波调速的设计与制作实验报告
单片机原理与应用课程设计报告直流电机PWM波调速的设计与制作要求一功能要求1实现利用PWM波控制直流电机的转速2用数码管显示PWM…
-
直流电机PWM 调速实验报告
直流电机PWM调速实验报告学院专业机械设计制造及其自动化姓名班级学号指导老师直流电机PWM调速实验一实验目的1掌握脉宽调制的方法2…
-
电机调速实验报告
重庆邮电大学综合实验报告姓名魏敏学号20xx213148班级0881202组号专业电气工程与自动化指导老师陈俊华自动化学院检测与控…
-
PID直流电机调速————课程设计报告
课程设计报告课程名称题目单片机课程设计基于51单片机PID直流电机调速摘要随着科技的日益进步对自动化的要求也越来越高直流电动机应用…
-
PID直流电机调速————课程设计报告
课程设计报告课程名称题目单片机课程设计基于51单片机PID直流电机调速摘要随着科技的日益进步对自动化的要求也越来越高直流电动机应用…
-
直流伺服电机实验报告
直流电机的特性测试一实验要求在实验台上测试直流电机机械特性工作特性调速特性空载和动态特性其中测试机械特性时分别测试电压电流转速和扭…
-
直流电动机实验报告
电机实验报告课程名称电机实验指导老师成绩实验名称直流并励电动机实验类型同组学生姓名一实验目的和要求1掌握用实验方法测取直流并励电机…
-
a直流电机实验报告4
直流电机实验报告课程名:电机学与电力拖动姓名:学院:电气工程学院班级:电气1108班学号:指导老师:2-2直流发电机一、实验目的1…
-
直流电机实验报告
实验题目类型:设计型《电机与拖动》实验报告实验题目名称:直流电动机实验实验室名称:电机及自动控制实验室实验组号:1组指导教师:报告…