自动控制原理设计报告

Harbin Institute of Technology
自动控制原理设计报告
课程名称: 自动控制原理
设计题目: 核反应棒控制系统
院 系: 电气工程及自动化学院
班 级:
设 计 者:
学 号:
指导教师:
设计时间:2011年12月20
哈尔滨工业大学
哈尔滨工业大学课程设计任务书
*注:此任务书由课程设计指导教师填写。
目 录
第一章、设计思路……………………………………………………………………5
1.1超前补偿方法……………………………………………………………5
1.2闭环主导极点方法………………………………………………………5
第二章、手工设计部分………………………………………………………………5
2.1、数据计算………………………………………………………………^5
2.2开环传递函数补偿前后的伯德图…………………………………………6
2.3电路实现……………………………………………………………………7
第三章、计算机辅助设计部分 …………………………………………………………8
3.1 simulink仿真框图…………………………………………………………8
3.2伯德图………………………………………………………………………8
3.3阶跃响应曲线………………………………………………………………10
第四章、设计心得体会………………………………………………………………11
第五章、参考文献……………………………………………………………………11
第一章设计思路
根据题目要求很容易求出系统的开环传递函数为
G(s)=Ka/[s2(0.025s+1)]
可知系统是三阶的,属于高阶系统,题目有三个要求①设计合适的校正网络,使得系统足够稳定,②系统的阶跃响应的超调量在10%到20%之间,③调节时间不大于2s。系统的阶跃响应的超调量和调节时间都是系统的动态性能指标,因此如果想要必须从系统的动态指标入手,找出设计突破口。在设计过程中我先后采用了两种设计思想,第一中是超前滞后补偿思想和闭环主导极点补偿思想。
1.1超前补偿方法
高阶系统性能指标间的关系式(经验公式)为:
Mr=1/sinγ;
σp=0.16+0.4(Mr-1)
ts=π[2+1.5(Mr-1)+2.5(Mr-1)2]/wc
根据以上公式可求出γ>58。 且wc>3.3rad/s。因为当wc=3.3rad/s时γ=-10左右,如果采用超前补偿进行相位补偿的话,应该补偿的相位裕度超过了70度,但是当补偿角度大于60度时补偿网络很难实现,因此我考虑使用两次超前补偿,但是经过计算发现,要使第二次超前补偿补偿角度最大(达到60度),第一次超前补偿角度最多也只能达到5度左右。而且有一个很奇怪的现象就是当两次补偿的角度“逼近”70度时,使用matlab仿真发现超调量和调节时间都超过了题目要求,因此利用高阶系统性能指标间的关系式(经验公式),使用超前补偿的方法是行不通的。
1.2利用闭环主导极点的方法
教材的第三章《控制系统的时域分析法》讲过:高阶系统中离虚轴最近的积点,如果它与虚轴的距离比其他极点的距离的1/5还小,并且该极点附近没有零点,则可以认为系统的响应主要由该极点决定。这种对系统响应起主导作用的极点称为系统的主导极点。因此只要找到满足要求的闭环主导极点,即可以将高阶系统的动态性能指标之间的关系式用二阶系统的性能指标关系式来求。二阶系统的动态性能指标关系式为:
σp=e-ξπ(1-ξ2)1/2
ts=4/(ξWn)
根据以上公式可求出ξ和Wn的范围,有因为闭环极点的为S1=-ξWn+(1-ξ2)1/2、
S2=-ξWn-(1-ξ2)1/2,所以可求出闭环极点,然后求出Ka和第三个闭环极点,这样就能求出补偿后的闭环传递函数,再求出补偿环节Gc(s)。
第二章手工设计部分
2.1、数据计算
在未加补偿时,系统的开环传递函数为:
Go(s)= Ka*Kt*n/[(τS+1)*J*S2]
因为 Kt*n/J=1, τ=0.025
所以 Go(s)=Ka/[s2(0.025s+1)]
由闭环主导极点的概念可知:高阶系统中离虚轴最近的积点,如果它与虚轴的距离比其他极点的距离的1/5还小,并且该极点附近没有零点,则可以认为系统的响应主要由该极点决定。因此只要找到满足要求的闭环主导极点,即可以将高阶系统的动态性能指标之间的关系式用二阶系统的性能指标关系式来求。二阶系统的动态性能指标关系式为:
σp=e-ξπ(1-ξ2)1/2
ts=4/(ξWn)
因为要求超调量σp在10%到20%之间,ts小于2s,为了便于计算,选取σp=16.3%(因为此时ξ=0.5) ,去ts=2s,
σp=e-ξπ(1-ξ2)1/2=0.163
ts=4/(ξWn)=2s
可求得 ξ=0.5,Wn=4,
所以两闭环主导极点 S1=-ξWn+(1-ξ2)1/2=-2*(1-31/2j) S2=-ξWn-(1-ξ2)1/2=-2*(1+31/2j)
则补偿之后系统的闭环特征方程为(S-S1)*(S-S2)*(S-S3)=(S2+4S+16)*(S-S3)
设S3=-b,则补偿之后系统的闭环特征方程变为S3+(4+b)S2+(16+4b)S+16b。
因为未加补偿时,系统的没有闭环零点,且闭环主极点的概念也要求极点附近没有零点,所以补偿网络最好不要“引入”零点;而且未加补偿时特征方程的S2项系数为0.025,太过于小了,因此选补偿网络为
Gc(S)=K1*S/(S+d)
又因为Ka和K1都是待定量,在闭环系统传递函数中两者是以乘积的形式出现,而且为了便于补偿网络的电路实现,可以省略K1。
所以 Gc(S)=S/(S+d)
因为Φ(S)=Go(S)*Gc(S)/[1+=Go(S)*Gc(S)]=40*Ka/[S3+(40+d)*S2+40*d*S+40*Ka]
所以S3+(4+b)S2+(16+4b)S+16b= S3+(40+d)*S2+40*d*S+40*Ka
对比系数可知:
4+b=40+d
16+4b=40*d
16*b=40*Ka
解得b=40.44, d=4.44, Ka=16.176
所以S3=-b=40.44 大于2*31/2的5倍,所以S1、S2是系统的闭环主导极点。
所以 Go(s)=Ka/[s2(0.025s+1)]=16.176/[s2(0.025s+1)]
Gc(S)=S/(S+d)=S/(S+4.44)
Ge(S)= 16.176/[S*(0.025*S+1)*(S+4.44)]
Φe(S)=647.04/(S3+44.44*S2+177.6*S+647.04)
利用matlab进行验算可求得
σp=16.12%, ts=2s
完全满足设计要求。
2.2开环传递函数补偿前后的伯德图
开环传递函数补偿前的伯德图如图2.2.1所示,补偿之后的伯德图如图2.2.2所示
图2.2.1 补偿之前的伯德图
图2.2.2开环传递函数补偿后的伯德图
2.3电路实现
因为 Gc(S)=S/(S+4.44)可使用RC电路来实现,输入端为电容和电阻两端电压,输出为电阻两端电压,电路图如图2.3.1所示。
Φ(S)=Ur(S)/Uo(S)=RCS/(RCS+1)
所以RC=0.2252, 去R=2.252KΩ, C=100uF

第三章计算机辅助设计过程
3.1simulink仿真框图
使用matlab软件下的sumulink软件进行仿真,仿真框图如图3.1.1及仿真结果如图3.1.2如下:

图3.1.1simulink仿真框图
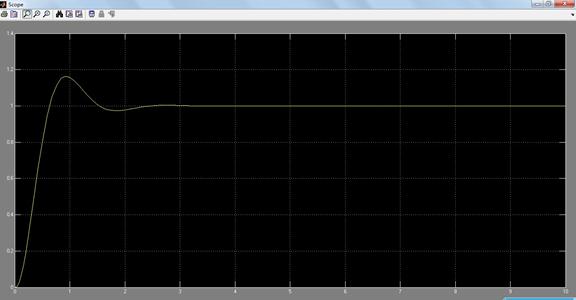
图3.1.2simulink仿真结果图
3.2伯德图
在matlab命令窗口中输入
>> num=16.176;
>> den=conv([1,0],conv([1,0],[0.025,1]));
>> margin(num,den)
回车之后得到了补偿之前系统开环传递函数的伯德图(如图3.2.1),由图可知补偿之前开环传递函数的剪切频率为4.01rad/s,相位裕度为-5.73
在matlab命令窗口中输入
num=[16.176,0];
den=conv([1,0],conv([1,0],conv([0.025,1],[1,4.44])));
>> margin(num,den)
回车之后即可得到开环系统的伯德图如图3.2.2所示,由图上可以看出开环传递函数的剪切频率为3.01rad/s,相位裕度为51.6.

图3.2.1补偿之前开环函数的伯德图
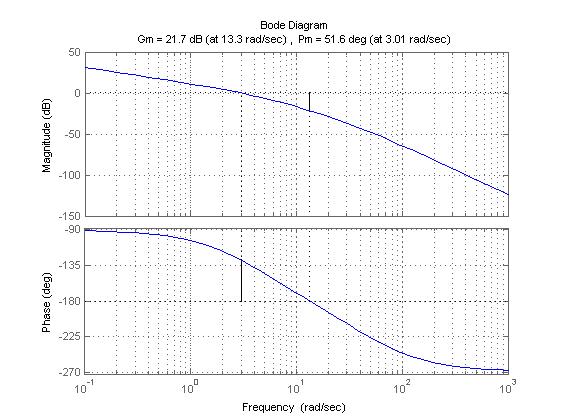
图3.2.2补偿之后的开环传递函数伯德图
3.3阶跃响应曲线
在matlab命令窗口中输入
Matlab 仿真源程序
>> num=647.04; %设置分子的系数
den=[1,44.44,177.6,647.04]; %设置分母的系数
G=tf(num,den);
t=0:0.1:200; % 从0到30每隔0.01取一个值
c=step(G, t); % 动态响应的幅值赋给变量C
plot(t,c) %绘制二维图形,横坐标取t,纵坐标取c
grid % 绘制网格线
[y,x,t]=step(num,den,t); %求系统单位阶跃响应
maxy=max(y) % 求取响应的最大值
ys=y(length(t)) %求取响应的终值
pos=(maxy-ys)/ys %求取超调量
n=1;
while y(n)<0.5*ys
n=n+1;end
td=t(n) %求取延迟时间
n=1;
while y(n)<ys
n=n+1;end
tr=t(n) %求取上升时间
n=1;
while y(n)<maxy
n=n+1;end
tp=t(n) %求取峰值时间
L=length(t);
while (y(L)>0.98*ys)&(y(L)<1.02*ys)
L=L-1;end
ts=t(L)
回车之后就能得到响应的最大值maxy =1.1612、响应的终值ys = 1.0000、超调量pos = 0.1612、延迟时间td = 0.4000、上升时间tr = 0.7000、峰值时间tp = 0.9000、调节时间ts = 2。
可知系统稳定,σp=16.12% ,ts=2s,满足设计要求参数。
得到的阶跃响应曲线如图3.3.1所示

图3.3.1阶跃响应曲线
第四章 设计心得体会
这次课程设计使我对自动控制原理这门学科有了更深层次的理解与认识,知道了自动控制原理的实际用途与用法,为我以后工作中使用所学过的自动控制原理知识奠定了良好的基础。不仅如此,通过这次课程设计,我把这门课程的所有知识都统一了起来,对我的期末考试的复习起了很大的作用,提高了复习效率。
这次课程设计的题目是“核反应棒控制系统”,这个题目乍一看感觉很高深,但是仔细分析之后发现这就是要求我使用所学过的知识对这个系统进行补偿,使这个系统的超调量和调节时间这两个动态性能指标达到要求。在设计的过程中我先后使用了两种设计思想,第一种是超前滞后补偿的设计思想,这种设计思想是利用高阶系统动态性能指标之间关系的经验公式来进行分析,经过计算发现这种方法无法满足设计要求,可能是经验公式的使用的局限性造成的。后来我采用了第二种 设计思想即闭环主导极点的设计思想,这一思想主要依据闭环主导极点的概念:“高阶系统中离虚轴最近的积点,如果它与虚轴的距离比其他极点的距离的1/5还小,并且该极点附近没有零点,则可以认为系统的响应主要由该极点决定。这种对系统响应起主导作用的极点称为系统的主导极点”,这种设计思想更加简单,易于计算,最终得到了能使系统达到动态性能指标的补偿网络。
第五章参考文献
【1】、梅晓榕主编、庄显义主审《自动控制原理》科学出版社
【2】、梅晓榕主编、庄显义主审《自动控制原理学习与考研指导》科学出版社
第二篇:自动控制原理课程设计报告-潘娜
一、 设计题目
设单位负反馈系统的开环传递函数为

用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:
(1) 相角裕度 ;
;
(2) 在单位斜坡输入下的稳态误差为 ;
;
(3) 系统的剪切频率小于7.5rad/s。
要求:
(1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);
(2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);
(3) 用MATLAB编程代码及运行结果(包括图形、运算结果);
(4) 校正前后系统的单位阶跃响应图。
二、 设计报告正文
1、设计思路
(1)按要求的稳态误差系数,求出系统的开环放大系数K。
因为题目要求在单位斜坡输入下的稳态误差为ess=0.1
所以有 ess=lim 1/ [s·G0(s)]=1/k=0.1→k=10
(2)将k值代入原函数并令s=jw,得系统的开环频率特性为
G0(jw)=10/[jw(jw+1)]
(3)截至频率Wc=100.5=3.16rad/s,
相角裕量为γ=1800+∠G(jwc)=1800-900-arctanwc=900-arctan3.16=17.970
因为需增加的相位裕量较大且在Wc附近的Gs(jw)的相角减小很快,所以选择滞后校正对系统进行校正。
利用Matalab画出校正前系统的伯德图如图一:
源代码:no=[10];
do=[1 1 0];
syso=tf(no,do);
margin(syso);
grid
运行结果:相角裕量 Pm =17.9642 截止频率 Wcp = 3.0842
(4)根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出b和T值并确定校正装置的传递函数。
(5)研究已校正系统的伯德图,检查全部性能指标是否满足要求。

图一
2、详细设计
Ⅰ、校正前的系统分析
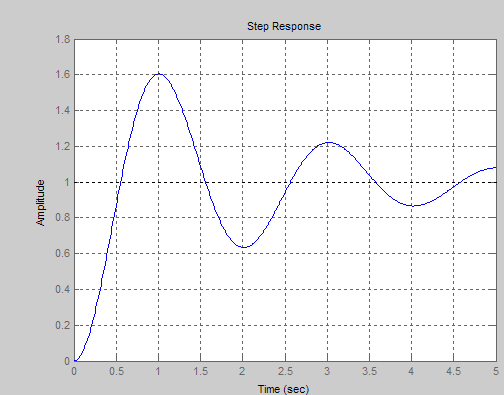
(1)单位阶跃响应分析
源代码: G=tf([10],[1 1 0 ]);
G1=feedback(G,1);
t=0:0.01:5;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正前单位阶跃响应’);
在Matlab中运行得到单位阶跃响应图如图二
由图二可知,系统在单位阶跃输入下,开始时振荡比较大,超调量也比较大,系统的动态性能不佳。
(2)开环传递函数bode图分析
由图一可看出,相角裕量γ=17.96420 截止频率wc=3.0842rad/s。此时相角裕量不符合要求。
图二 校正前单位阶跃响应
Ⅱ、系统校正过程
(1) 根据相角裕量γ≥450的要求,再考虑到串接滞后校正装置的相角滞后,从未校正系统的频率特性曲线图1上,找出对应相角-1800+(450+50)=-1300处的频率wc’≈0.839rad/s。wc’将作为校正后系统的增益交界频率。
(2) 确定滞后装置的传递函数 Gc=(1+aTs)/(1+Ts)
①根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出a值。
在wc=wc’处,从未校正的对数幅频特性曲线上求得 :
20lg|G0(j wc’)| =19dB···················①
再由20lg 1/a=19.4dB 计算出a=0.107
②由 1/aT=1/10·wc’ 所以当wc’≈0.83rad/s a=0.107时,可求得
T=113s
③将所求的a值和T值代入①式得校正装置的传递函数为:
Gc(s)=(1+11s)/(1+113s)
利用Matlab画出校正装置的Bode图 如图三
源代码:G0=tf([11 1],[113 1]);
margin(G0); 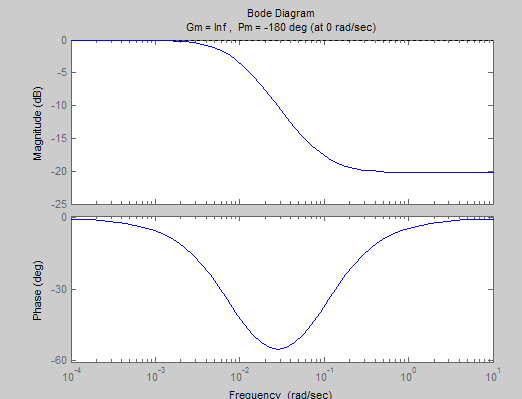
图三校正装置bode图
(3)已校正后系统的开环传递函数为 G(s)= G0(s)·Gc(s)
=10(1+11s)/[s(s+1)(1+113s)]
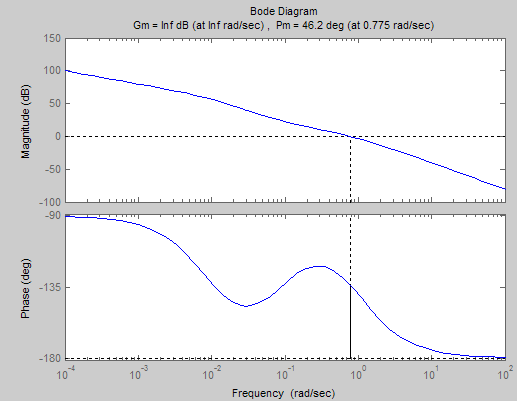
利用Matalab画出校后系统的伯德图如图四
源代码:
n1=10;
d1=[1 1 0]
s1=tf(n1,d1);
s2=tf([11 1],[113 1]);
s=s1*s2;
[Gm,Pm,Wcm,Wcp]=margin(s)
margin(s)
运算结果:相角裕量Pm =46.1952 截止频率 Wcp =0.7747
Ⅲ、校正后验证
(1)校正后伯德图分析
由图三可知校正后的相角裕量γ’=46.20>450 截止频率wc’’=0.775rad/s<7.5rad/s 符合设计题目的要求。
(2)校正后系统的单位阶跃响应图 图五
源代码:G=tf([110 10],[113 114 1 0]);
G1=feedback(G,1);
t=0:0.1:10;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正后单位阶跃响应’);
图四校正后bode图
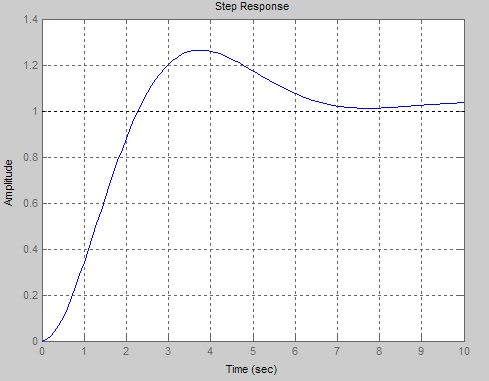
图五 校正后单位阶跃响应图
(3)将校正前后以及校正装置的伯德图放入同一个图中如图六
源代码:
G1=tf([10],[1 1 0]);
G2=tf([11 1],[113 1]);
G3=tf([110 10],[113 114 1 0]);
[gm,pm,wg,wp]=margin(G1);
bode(G1,'r--',G2,'g',G3);
grid
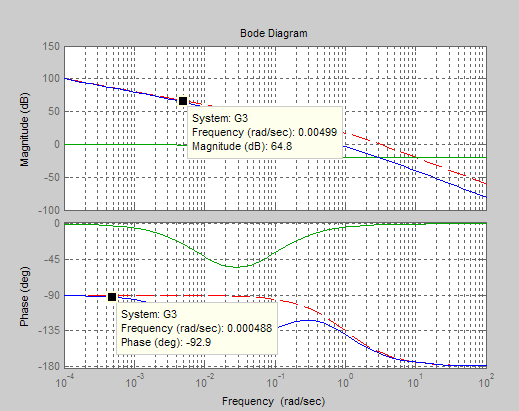
图六 校正前后和校正装置bode图
(校正前—红色 校正装置—绿色 校正后—蓝色)
由图六可看出,系统加入滞后校正装置后,在w>0.0049rad/s的频率范围内,滞后装置衰减了G(jw)的幅值,使系统的wc左移到wc’,使系统的快速性下降。
-
自动控制原理课程设计报告
自动控制原理课程设计专业设计题目控制系统的综合设计班级自动化0943学生姓名XXX学号指导教师分院院长XXX教研室主任XX电气工程…
-
《自动控制原理》课程设计报告书
二○XX~二○XX学年第一学期信息科学与工程学院课程设计报告书课程名称:自动控制原理课程设计班级:自动化2010级3班学号:姓名:…
-
自动控制原理课程设计
课程实习报告课程名称:自动控制原理及专业软件课程实习题目名称:三阶系统分析与校正年级专业及班级:建电1001姓名:学号:指导教师:…
-
自动控制原理课程设计
金陵科技学院课程设计目录目录绪论1一课程设计的目的及题目211课程设计的目的212课程设计的题目2二课程设计的任务及要求321课程…
-
自动控制原理课程设计报告-罗杰
审定成绩自动控制原理课程设计报告题目单位负反馈系统设计校正学生姓名院别学号设计时间罗杰22班级电子081BF物理与电子学院专业电子…
-
《自动控制原理》课程学习心得
摘要:本文根据自动控制原理的课程特点,结合自动控制原理课程的教学现状,在总结经验和教训的基础上,遵循理论联系实践的原则,结合mat…
-
自动控制原理学习总结
班级:09自动化2班姓名:朱猛学号:0905071015自动控制原理是自动控制理论的基础,其主要内容包括:自动控制系统的基本组成和…
-
《自动控制原理》课程学习心得体会
《自动控制原理》课程学习心得体会***(***)20xx级电子科学与技术我是一名电子科学类的学生,专业的培养目标就是要求我们能在电…
-
自动控制原理知识点总结
自动控制原理知识点总结第一章1什么是自动控制填空自动控制是指在无人直接参与的情况下利用控制装置操纵受控对象是被控量等于给定值或按给…
-
自动控制原理第五章复习总结(第二版)
第五章计算机控制系统1现代过程工业发展的需要2生产的安全性和可靠性生产企业的经济效益等指标的需要3运算速度快精度高存储量大编程灵活…