运动控制系统实验指导书(修改)20xx-4
运动控制系统实验指导书
20##年3月
目 录
第一部分 MCL-11型电机及控制教学实验台介绍 …………2
第二部分 实验项目
实验一 晶闸管直流调速系统电流-转速调节器调试…………………………8
实验二 双闭环晶闸管不可逆单闭环直流调速系统测试 …………………10
实验三 异步电动机的变压变频调速演示实验…………………………15
第一部分 MCL-11型电机及控制教学实验台介绍
一、实验机组
直流电动机:PN=185w,UN=220V,IN=1.1A,nN=1500r/pm。
二、实验挂箱
(1)MCL-18挂箱:G(给定),(GT+MF)触发电路及功放,单双脉冲观察,(FBC+FA)电流反馈及过流过压保护,零速封锁器(DZS),速度变换器(FBS),速度调节器(ASR),电流调节器(ACR)。
(2)MCL-33挂箱:脉冲通断控制及显示,一组、二组可控硅,平波电抗器。
(3)MEL-11挂箱:六组可调电容。
三、选配挂箱
(1)MEL-03挂箱:可调电阻器。
(2)电机导轨及测速发电机,直流发电机M01:PN=100W,UN=200V。
(3)电机导轨及测功机、测速发电机,MEL-13组件。
控制系统挂箱介绍和使用说明
(一)、MCL-18挂箱
MCL—18由G(给定),(GT+MF)触发电路及功放,双脉冲观察,(FBC+FA)电流反馈及过流过压保护,零速封锁器(DZS),速度变换器(FBS),速度调节器(ASR),电流调节器(ACR)组成。
1.G(给定)
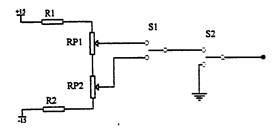
原理图如图1-1。它的作用是得到下列几个阶跃的给定信号:
(1)0V突跳到正电压,正电压突跳到0V;
(2)0V突跳到负电压,负电压突跳到OV;
 (3)正电压突跳到负电压。负电压突跳到正电压。
(3)正电压突跳到负电压。负电压突跳到正电压。
图1-1给定原理图
正负电压可分别由RP1、RP2两多圈电位器调节大小(调节范围为0-±13V左右)。数值由面板右边的数显窗读出。
只要依次扳动S1、S2的不同位置即能达到上述要求。
(1)若S1放在“正给定”位,扳动S2由“零”位到“给定”位即能获得0V突跳到正电压的信号,再由“给定”位扳到“零”位能获得正电压到0V的突跳;
(2)若S1放在“负给定”位,扳动S2,能得到0V到负电压及负电压到0V的突跳;
(3)S2放在“给定”位,扳动S1,能得到正电压到负电压及负电压到正电压的突跳。
使用注意事项:给定输出有电压时,不能长时间短路,特别是输出电压较高时,否则容易烧坏限流电阻。
2.脉冲控制及移相
本实验台提供“双窄”脉冲。,每组“双窄”脉冲相位差为60。,经过调制的“双窄”脉冲(调制频率大约为3~10KHz),作为三相调压的专用触发脉冲,触发脉冲分别由两路功放进行放大,分别由Ublf和Ublr进行控制。当Ublf接地时,第一组脉冲放大电路进行放大,脉冲由X1插座输出。当Ublr接地时,第二组脉冲放大电路进行工作,脉冲由X2输出。脉冲移相由Uct端的输入电压进行控制,当Uct端输入正信号时,脉冲前移,Uct端输入负信号时,脉冲后移,移相范围为l0。-160。。偏移电压调节电位器RP调节脉冲的初始相位,不同的实验初始相位要求不一样。
3.FBC+FA+FT(电流变送器与过流过压保护)
此单元有三种功能:一是检测电流反馈信号,二是发出过流信号。三是发出过压信号。电路图为1-2。
(1)电流变送器
电流变送器适用于可控硅直流调速装置中,与电流互感器配合,检测可控硅交流器交流进线电流,以获得与交流器电流成正比的直流电压信号,零电流信号和过电流逻辑信号等。
电流互感器的输出接至输入TA1,TA2,TA3,反映电流大小的信号经三相桥式整流电路整流后加至9R1、9R2、VD7及RP1、9R3、9R20组成的各支路上,其中:
a.9R2与VD7并联后再与9R1串联,在其中点取零电流检测信号。
b.将RP1的可动触点输出作为电流反馈信号Ii,反馈强度由RP1进行调节。
c.将可动触点RP2与过流保护电路相联,输出过流信号,可调节过流动作电流的大小。
(2)过流保护(FA)
当主电路电流超过某一数值后(2A左右),由9R3,9R20上取得的过流信号电压超过运算放大器的反向输入端,使D触发器的输出为高电平,使晶体三极管V由截止变为导通,结果使继电器K的线圈得电,继电器K由释放变为吸引,它的常闭触点接在主回路接触器的线圈回路中,使接触器释放,断开主电路。并使发光二极管亮,作为过流信号指示,告诉操作者已经过流跳闸。
SA为解除记忆的复位按钮,当过流动作后,如过流故障已经排除,则须按下以解除记忆,恢复正常工作。
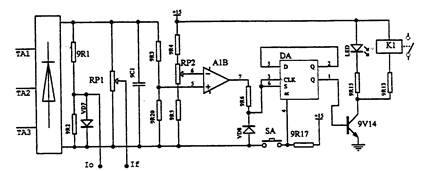
图1-2 电流变送器与过流保护原理图
4.零速封锁器(DZS)
零速封锁器的作用是当调速系统处于静车状态,即速度给定电压为零,同时转速也确为零时,封锁调节系统中的所有调节器,以避免静车时各放大器零漂引起可控硅整流电路有输出使电机爬行的不正常现象。原理电路如图1-3所示。
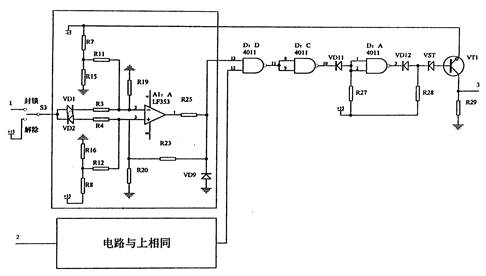
图1-3零速封锁器原理图
它的总输入输出关系是:
(1)当l端和2端的输入电压的绝对值都小于0.07V左右时,则3端的输出电压应为OV;
(2)当1端和2端的输入电压绝对值或者其中之一或者二者都大于0.2V时,其3端的输出电压应为-15V;
(3)当3端的输出电压已为-15V。后因l端和2端的电压绝对值都小于0.07V,使3端电压由-15V变为0V时,需要有100毫秒的延时。
3端为0V时输入到各调节器反馈网络中的场效应管,使其导通,调节器反馈网络短路而被封锁,3端为-15V时输入到上述场效应管使其夹断,而解除封锁。
5.FBS(速度变换器)
速度变换器FBS用于转速反馈的调速系统中,将直流测速发电机的输出电压交换成适用于控制单元并与转速成正比的直流电压,作为速度反馈。
其原理图如图l-4所示。
使用时,将测速发电机的输出端接至速度变换器的输入端1和2。分两路输出。
(1)一路经电位器RP2至转速表,转速表(0-±2000n/s)已装在电机导轨上。
(2)另一路经电阻R1及电位器RP1,由电位器RP1中心抽头输出,作为转速反馈信号。反馈强度由电位器RP1的中心抽头进行调节,由电位器RP1输出的信号,同时作为零速封锁反映转速的电平信号。元件RP1装在面板上。

图1-4速度变换器FBS原理图
6.ASR(速度调节器)
速度调节器ASR的功能是对给定和反馈两个输入量进行加法,减法,比例,积分和微分等运算,使其输出按某一规律变化。它由运算放大器,输入与反馈网络及二极管限幅环节组成.其原理图如图1-5所示。
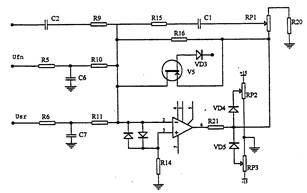
图1-5速度调节器原理图
速度调节器采用电路运算放大器,它具有两个输入端,同相输入端和倒相输入端,其输出电压与两个输入端电压之差成正比。电路运算放大器具有开环放大倍数大,零点漂移小,线性度好,输入电流极小,输出阻抗小等优点,可以构成理想的调节器。图l-5中,由二极管VD4,VD5和电位器RP2,RP3组成正负限幅可调的限幅电路。由C2,R9组成反馈微分校正网络,有助于抑制振荡,减少超调,Rl5,C1组成速度环串联校正网络。场效应管V5为零速封锁电路,当4端为0V时VD3导通,将调节器反馈网络短接而封锁,4端为-13V时,VD5夹断,调节器投入工作。RP3为放大系数调节电位器。
元件RP1,RP2,RP3均安装在面板上。电容C1两端在面板上装有接线柱,电容C2两端也装有接线柱,可根据需要外接电容。
7.ACR(电流调节器)
电流调节器适用于可控制传动系统中,对其输入信号(给定量和反馈量)时进行加法、减法、比例、积分、微分,延时等运算或者同时兼做上述几种运算。以使其输出量按某种预定规律变化。它是由下述几部分组成:运算放大器,两极管限幅,互补输出的电流放大级、输入阻抗网络、反馈阻抗网络等。

图1-6电流调节器原理图
电流调节器与速度调节器相比,增加了4个输入端,其中2端接过流Uβ信号,来自电流变换器的过流信号Uβ,当该点电位高于某值时,VST1击穿,正信号输入,ACR输出负电压使触发电路脉冲后移。Uz、UF端接逻辑控制器的相应输出端,当这二端为高电平时,三极管V1、V2导通将Ugt和Ugi信号对地短接,用于逻辑无环流可逆系统。
晶体管V3和V4构成互补输出的电流放大级,当V3、V4基极电位为正时,V4管(PNP型晶体管)截止,V3管和负载构成射极跟随器。如V3,V4基极电位为负时,V3管(NPN型晶体管)截止,V4管和负载构成射极跟随器。接在运算放大器输入端前面的阻抗为输入阻抗网络。改变输入和反馈阻抗网络参数,就能得到各种运算特性。
元件RP1、RP2、RP3装在面板上,C1、C2的数值可根据需要,由外接电容来改变。
8.电源输入输出端
面板下部的L1、L2、L3三接线柱表示三相电源的输入,U、V、W表示电源输出端。在进行实验时,调压器的输出端接到L1、L2、L3,U、V、W接到可控硅或电机,在L1、U,L2、V,L3、W间接有电流互感器,L1、L2间接有电压互感器,当电流过大或电压过高时,过流保护和过压保护动作。
使用注意事项:接到可控硅的电压必须从U、V、W引出,否则过流保护和过压保护不起作用。
(二)、MCL-33挂箱
MCL-33由脉冲控制及状态指示,一组可控硅,二组可控硅及二极管,RC吸收回路,平波电抗器L组成。
1.脉冲控制及状态指示。
面板上部的二组六档直键开关控制从插座Xl、X2接到可控硅的脉冲,l、2、3、4、5、6分别控制可控硅VT1、VT2、VT3、VT4、VT5、VT6的触发脉冲,l’、2’、3’、4’、5’、6’分别控制可控硅VT1’、VT2’、VT3’、VT4’、VT5’、VT6’的触发脉冲,当直键开关按下时,脉冲断开,弹出时脉冲接通,表示脉冲从X1、X2输出至可控硅,每只可控硅的阴极接有一熔断丝。
2.一桥可控硅由六只5A800V组成,内部线路为图1-7。
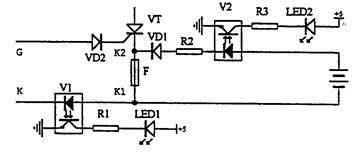
图1-7可控硅内部线路
3.二桥可控硅由六只5A800V构成,另有六只5A800V二极管。
二组可控硅的阴极、阳极均并有RC吸收回路,以防止过大的du/dt。
4.RC吸收回路可消除整流引起的振荡。当做调速实验时需接在整流桥输出端。平波电抗器可作为电感性负载电感使用,电感分别为50mH、lOOmH、200mH、700mH,在1A范围内基本保持线性。
第二部分 实验项目
实验一 晶闸管直流调速系统电流-转速调节器调试
一.实验目的
1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。
2.掌握直流调速系统主要单元部件的调试步骤和方法。

二.实验内容
1.调节器的调试
三.实验设备及仪器
1.教学实验台主控制屏。
2.MEL—11组件
3.MCL—18组件
4.双踪示波器
5.万用表
四.实验方法
1.速度调节器(ASR)的调试
按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。
(1)调整输出正、负限幅值
“5”、“6”端 接可调电容,使ASR调节器为PI调节器,加入一定的输入电压(由MCL—18的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于±5V。
(2)测定输入输出特性
将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
(3)观察PI特性
拆除“5”、“6”端短接线,突加给定电压(±0.1V),用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。
2.电流调节器(ACR)的调试
按图1-5接线。
(1)调整输出正,负限幅值
“9”、“10”端 接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值大于±6V。
(2)测定输入输出特性
将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
(3)观察PI特性
拆除“9”、“10”端短接线,突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。
五. 实验报告
1.画各控制单元的调试连线图。
2.简述各控制单元的调试要点。
实验二 双闭环晶闸管不可逆直流调速系统测试
一.实验目的
1.了解双闭环不可逆直流调速系统的原理,组成及各主要单元部件的原理。
2.熟悉电力电子及教学实验台主控制屏的结构及调试方法。
3.熟悉MCL-18,MCL-33的结构及调试方法
4.掌握双闭环不可逆直流调速系统的调试步骤,方法及参数的整定。
二.实验内容
1.各控制单元调试
2.测定电流反馈系数。
3.测定开环机械特性及闭环静特性。
4.闭环控制特性的测定。
5.观察,记录系统动态波形。
三.实验系统组成及工作原理
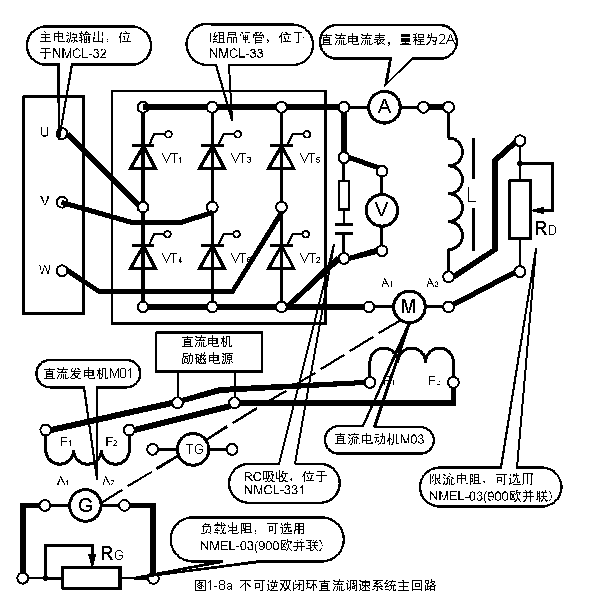
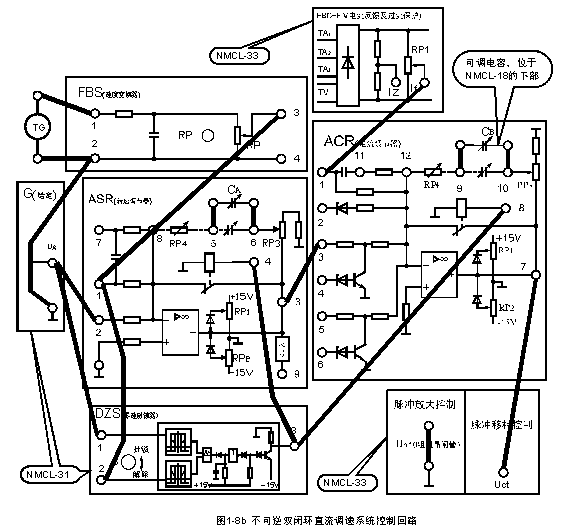
双闭环晶闸管不可逆直流调速系统由电流和转速两个调节器综合调节,由于调速系统调节的主要量为转速,故转速环作为主环放在外面,电流环作为付环放在里面,这样可抑制电网电压波动对转速的影响,实验系统的控制回路如图1-8b所示,主回路可参考图1-8a所示。
系统工作时,先给电动机加励磁,改变给定电压的大小即可方便地改变电机的转速。ASR,ACR均有限幅环节,ASR的输出作为ACR的给定,利用ASR的输出限幅可达到限制起动电流的目的, ACR的输出作为移相触发电路的控制电压,利用ACR的输出限幅可达到限制amin和bmin的目的。
当加入给定Ug后,ASR即饱和输出,使电动机以限定的最大起动电流加速起动,直到电机转速达到给定转速(即Ug=Ufn),并出现超调后,ASR退出饱和,最后稳定运行在略低于给定转速的数值上。
四.实验设备及仪器
1.教学实验台主控制屏。
2.MCL—33组件
3.MEL—11组件
4.MCL—18组件
5.电机导轨及测速发电机(或光电编码器)
6.直流电动机M03
7.双踪示波器
8.万用表
五.注意事项
1.三相主电源连线时需注意,不可换错相序。
2.系统 开环连接时, 不允许突加给定信号Ug起动电机
上图,输入电压L1、L2、L3要经过过流过压保护环节FBC+FA,再输出U、V、W。线电压不大于200VAC(相电压不大于115VAC)
3.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。
4.进行闭环调试时,若电机转速达最高速且不可调,注意转速反馈的极性是否接错。
5.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
六. 实验方法
1.按图1-8a,1-8b接线,未上主电源之前,检查晶闸管的脉冲是否正常。同步脉冲控制及移相部分接上低压电源(+15V、0、-15V)。
(1)用示波器观察双脉冲观察孔,应有间隔均匀,幅度相同的双脉冲
(2)检查相序,用示波器观察“1”,“2”脉冲观察孔,“1”脉冲超前“2”脉冲600,则相序正确,否则,应调整输入电源。
(3)将控制一组桥触发脉冲通断的六个直键开关弹出,用示波器观察每只晶闸管的控制极,阴极,应有幅度为1V—2V的脉冲。
2.双闭环调速系统调试原则
(1)先部件,后系统。即先将各单元的特性调好,然后才能组成系统。
(2)先开环,后闭环,即使系统能正常开环运行,然后在确定电流和转速均为负反馈时组成闭环系统。
(3)先内环,后外环。即先调试电流内环,然后调转速外环。
3.单元部件调试
ASR调试方法与实验一相同: 将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,输入端电压为2V时,调节电位器RP3\RP4,观察输出电压,记录电位器RP3\RP4的旋转方向对放大倍数的影响。
拆除短路线,接入电容5-7UF左右,使调节器为PI调节器,输入分别为-、+,输出限幅为±5V。
ACR调试方法与实验一相同:将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,输入端电压为2V时,调节电位器RP3\RP4,观察输出电压,记录电位器RP3\RP4的旋转方向对放大倍数的影响。
拆除短路线,接入电容7UF左右,使调节器为PI调节器,输入分别为-、+,调整正,负限幅电位器,限幅为±6V,使脉冲前移a£300,使脉冲后移b=300,然后,将反馈电位器RP3逆时针旋到底,使放大倍数最小。
4.系统调试
将Ublf接地,Ublr悬空,即使用一组桥六个晶闸管。
(1)电流环调试
电动机不加励磁
(a)系统开环,即控制电压Uct由给定器Ug直接接入,主回路接入电阻RD并调至最大(RD由NMEL—03的两只900Ω电阻并联)。主电路合闸,调输入电压115VAC(线电压200VAC)。逐渐增加给定电压,用示波器观察晶闸管整流桥两端电压波形。在一个周期内,电压波形应有6个对称波头平滑变化 。
(b)增加给定电压,减小主回路串接电阻Rd,直至Id=1.1Ied,再调节MCL-33挂箱上的电流反馈电位器RP,使电流反馈电压Ufi近似等于速度调节器ASR的输出限幅值(ASR的输出限幅可调为±5V)。
(c)MCL—18的G(给定)输出电压Ug接至ACR的“3”端,ACR的输出“7”端接至Uct,即系统接入已接成PI调节的ACR组成电流单闭环系统。ASRACR的“9”、“10”端接可调电容,可预置7μF,同时,反馈电位器RP3逆时针旋到底,使放大倍数最小。逐渐增加给定电压Ug,使之等于ASR输出限幅值(+5V)(-5V),观察主电路电流是否小于或等于1.1Ied,如Id过大,则应调整电流反馈电位器,使Ufi增加,直至Id<1.1Ied;如Id<Ied,则可将Rd减小直至切除,此时应增加有限,小于过电流保护整定值,这说明系统已具有限流保护功能。测定并计算电流反馈系数
(2)速度变换器的调试
电动机加额定励磁,短接限流电阻RD。
(a)系统开环,即给定电压Ug直接接至Uct,Ug作为输入给定,逐渐加正给定,当转速n=1500r/min时,调节FBS(速度变换器)中速度反馈电位器RP,使速度反馈电压为+5V(-5V)左右,计算速度反馈系数。
(b)速度反馈极性判断: 系统中接入ASR构成转速单闭环系统,即给定电压Ug接至ASR的第2端,ASR的第3端接至Uct。调节Ug(Ug为负电压),若稍加给定,电机转速即达最高速且调节Ug不可控,则表明单闭环系统速度反馈极性有误。但若接成转速—电流双闭环系统,由于给定极性改变,故速度反馈极性可不变。
4.系统特性测试
将ASR,ACR均接成PI调节器接入系统,形成双闭环不可逆系统。
ASR的调试:(a)反馈电位器RP3逆时针旋到底,使放大倍数最小;
(b)“5”、“6”端接入可调电容,预置5~7μF;
(c)调节RP1、RP2使输出限幅为±5V。
(1)机械特性n=f(Id)的测定
(a)调节转速给定电压Ug,使电机空载转速至1500 r/min,再调节测功机加载旋钮,在空载至额定负载范围内分别记录7~8点,可测出系统静特性曲线n=f(Id)

【注意:1、若负载时转速下降明显,则检查输入相电压是否达115VAC(线电压200VAC)。
2、上表中的电流I约为0、0.2、0.4、0.6、08、1.0倍的额定电流,记录实际电流。】
(2)闭环控制特性n=f(Ug)的测定
调节Ug,记录Ug和n,即可测出闭环控制特性n=f(Ug)。

8.系统动态波形的观察
用二踪慢扫描示波器观察动态波形,用数字示波器记录动态波形。在不同的调节器参数下,观察,记录下列动态波形:
(1)突加给定起动时,电动机电枢电流波形和转速波形。
(2)突加额定负载时,电动机电枢电流波形和转速波形。
(3)突降负载时,电动机电枢电流波形和转速波形。
注:电动机电枢电流波形的观察可通过ACR的第“1”端
转速波形的观察可通过ASR的第“1”端
七. 实验报告
1.根据实验数据,画出闭环控制特性曲线。
2.根据实验数据,画出闭环机械特性,并计算静差率。
3.根据实验数据,画出系统开环机械特性,计算静差率,并与闭环机械特性进行比较。
4.分析由数字示波器记录下来的动态波形。
实验三 异步电动机的变压变频调速演示实验
一、实验目的
1、熟悉变频器的基本操作与参数设置
2、熟悉触摸屏的操作
3、熟悉和了解转速闭环控制实验
二、实验内容
1、MM440变频器的设置
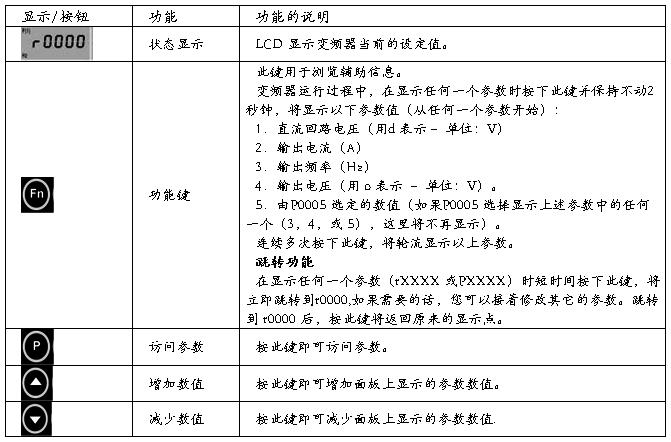
用基本操作面板(BOP)可以改变变频器的各个参数。为了利用BOP设定参数,必须首先拆下SDP,并装上BOP。BOP 具有7 段显示的五位数字,可以显示参数的序号和数值,报警和故障信息,以及设定值和实际值。
操作面板上按钮说明。
用PLC通过变频器控制电机是通过PLC的数字量输出信号作为变频器数字量输入信号,因而变频器的控制方式选为端子排控制。
所需参数
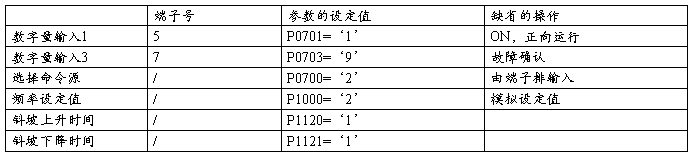
2、接线图
控制回路接线图:
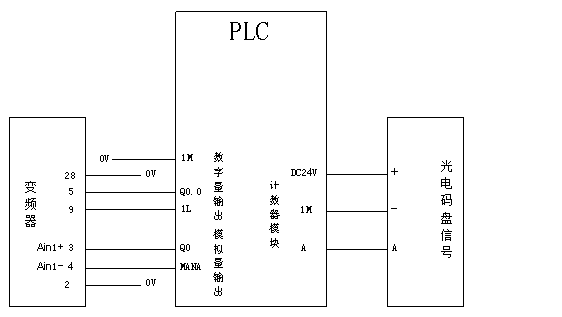
同时将拨码开关1拨至ON(1通道电压输入)
3、实验操作
1)加上电源
2)触摸“转速控制”按钮,进入转速控制实验界面
“起动”开始电机运行(需先设置给定转速)
“停止”电机停止运行
“返回”返回上一级画面;
“转速给定”目标转速,电机减速之前的目标转速;
“转速输出”电机运行转速;
“GAIN”比例增益;
“TI”积分时间;
“趋势曲线”可从“趋势曲线”界面中实时动态观测给定转速与实时转速的波形。
-
运动控制系统实验报告
实验一晶闸管直流调速系统电流转速调节器调试一实验目的1熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求2掌握直流调速…
-
运动控制系统实验报告
专业班级学号姓名学院名称运动控制仿真实验报告一实验内容与要求1单闭环转速负反馈2转速电流双闭环负反馈3晶闸管相控整流双闭环直流调速…
- 运动控制实验报告
- 运动控制系统专题实验报告表格
-
电力系统远动原理实验报告
电力系统远动原理实验报告实验名称厂站终端特性分析电气信息学院级任课教师一实验名称厂站终端特性分析二实验目的1了解厂站终端的作用厂站…
-
C++课程设计报告 运动会分数统计系统
C++课程设计报告运动会分数统计系统一.需求分析1问题描述运动会分数统计系统参加运动会有n个系,系编号为1n。比赛分成m个男子项目…
-
电机与运动控制系统_实验报告2
实验报告课程名称电机与运动控制系统实验第3次实验实验名称直流他励电动机在各种运行状态下的机械特性实验时间20xx年xx月xx日实验…
- 管理信息系统实验报告
-
管理信息系统实验报告
实验项目企业信息化及实验地点经管系机房T301实验日期20xx年6月15日实验项目电子商务系统设计实验地点经管系机房T301实验日…
-
机电系统创新与实践实验报告
机电系统创新与实践实验报告班级01311001学号1120xx0151姓名刘峰慧鱼探索者机器人一实验目的1认识了解慧鱼探索者机器人…
-
运动会计分系统程实验设计报告
重庆文理学院计算机科学与技术专业数据结构课程设计报告题目运动会计分系统班级14级计算机科学与技术姓名张超学号21458274042…