篇一 :机器人实训报告
实训项目 机器人模块组装实训报告
专业:
班级:
学号:
姓名:
指导老师:
机器人
1.简介:
机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业 、医学、农业、建筑业甚至军事等领域中均有重要用途。
现在,国际上对机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。”它能为人类带来许多方便之处!
2.来历:
robot,原为robo,意为奴隶,即人类的仆人。作家罗伯特创造的词汇。
3.组成:
机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。
是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。
…… …… 余下全文
篇二 :机器人实训报告7
机器人模块拆装实训报告
班级:
学号:
姓名:
同组人:
一、 课程目的
(1)锻炼动手能力和团队精神;
(2)系统训练创新能力和实践能力;
(3)自主建构工科基础知识。
二、 课程内容
1. 用AS-UII型机器人红外躲避障碍
2. 用AS-UII型机器人驱光行走
3. 用AS-EI型机器人模拟工业抓放机器人
三、 方案设计
1. 用AS-UII型机器人红外躲避障碍
红外传感器左边检测有信号则向右转,右边检测有信号则向左转
碰撞传感器左边有信号则向右后退,右边有信号则向左后退,再前进
2. 用AS-UII型机器人驱光行走
亮度传感器亮度左边高于右边则向左转
右边高于左边则向右转
3. 用AS-EI型机器人模拟工业抓放机器人
电动机1正转,轨道上机器人向一边移动
反转,轨道上机器人向另一边移动
…… …… 余下全文
篇三 :机器人实训心得
工业机器人
校企合作工学结合项目实训心得
12电气1 时前 127301127 2014.5.25 在信息科学技术飞速发展的今天,随着人力成本逐渐的上升,工业机器人逐渐取代人力成为流水线上行的“操作员”已成为必然趋势,很有幸参加了由苏州镒升贸易有限公司和我们学校组织的校企合作工学结合——工业机器人项目。该公司是苏州市高兴技术企业,主要从事自动化贸易,该公司是爱普生机器人在中国的销售和技术服务中心。
我们学习的是工业机器人课程,而工业机器人的主要作用是从事工业生产。我们也开设有机器人课程,但是我们的课程主要以介绍机器人为主,而这次的工业机器人课程主要以应用为主。前四天,我们主要学习机器人的动作指令、程序的控制语句和四轴机器人调试。开始学习时由于不熟悉EPSON VC+5.0的操作环境,很多小问题吧我搞得团团转,一次次的请导师帮助,现在想来还有点不好意思,不管多小的问题导师一遍遍的讲解直到听懂为止,有时候一个小问题导师都能讲好几遍,在调试四轴机器人似的时候,关于如何机械手坐标系,导师讲了好几遍,当问我们会了没时?我很不好意思的说了一句:“还不太明白”,导师又把机器人现场调试了一遍,又细致讲解了一遍又一遍。
…… …… 余下全文
篇四 :机器人实验报告
班级:电气0901 姓名:廖勇为 学号:0912108110
实验七机器人走迷宫实验
实验内容、步骤:
1)机器人从迷宫入口出发,用最少的时间走出迷宫,到达迷宫的出口。
2)走出迷宫后显示出行走的时间(行走时间越少越好)。
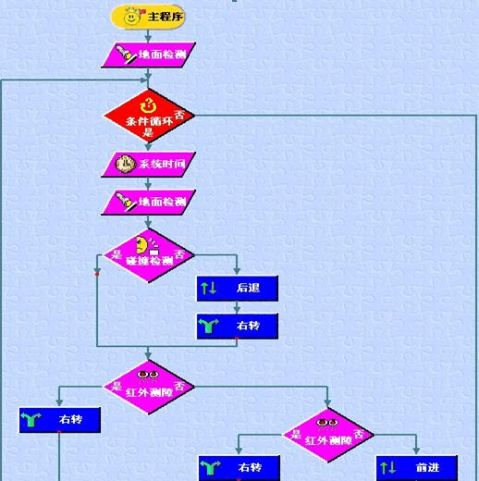
分析:首先需要检测地面传感器函数surface() 的返回值与不同地面颜色标志的关联,这样才能让机器人分辨出迷宫的出口。编写程序如下:(进行检测地面传感器函数surface() 的返回值的采集,可在“找地雷场地”中找到环境。)
程序流程图:
Jc代码:
2
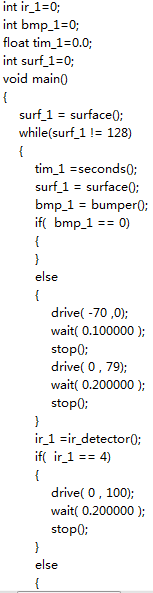
3
运行结果:
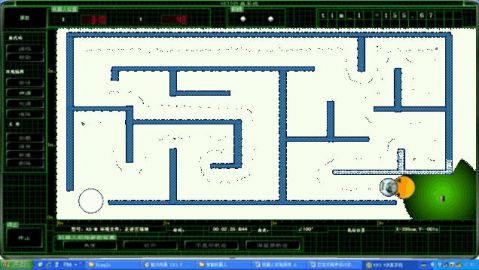
运行结果:首先进行地面检测,接着进入条件循环,碰撞检测后进行红外避障。否则结束,即说明已经找到火源了。
4
班级:电气0901 姓名:廖勇为 学号:0912108110
实验八 综合实验及测试
一、在较安静的情况下,机器人静止不动,当有人发出声音时机器人开始自由行走:机器人在行走的过程中分辨障碍物,遇到障碍物时发出声音报警并避开,继续行走。(30分)
要求:(1)写出机器人从静止到运动的条件值。
mic=microphone();
if(mic>150)
…… …… 余下全文

篇六 :制作机器人实验报告二心得
机器人实验报告二
仿生机器人、人形机器人运动控制
[实验目的]
熟悉仿生机器人、人形机器人运动控制方法。制作仿生机器人取物品的动作,制作人形机器人行走动作。
【实验方法】
1. 首先观察机器人行走的每一个动作,并记录动作是怎么样执行的,并且记录舵机的位置。
2. 打开robot软件接入机器人,进行对人形机器人调节每一个动作,达到行走的目的。
【实验器材】
电脑、人形机器人、下载线、电源。
【实验步骤】
一. 检测仿生机器人设备能不能正常运行。
二. 启动仿生机器人控制软件,并且连接机器人。
三. 编辑人形机器人的动作。
1. 添加人形机器人的初始位置。
2. 添加人形机器人的动作。
3. 添加人形机器人的循环动作。
4. 设置人形机器人的结束动作。
5. 保存和尚在编辑完的动作。
6. 演示人形机器人所编辑的动作。
7. 对不符合的动作进行修正。
【注意事项】
1. 在用人形机器人时,首先要充满电。
2. 在下载程序时不要动机器人。
3. 在编辑时两个动作不能跨度过大。
4. 在演示时以防机器人摔倒。
【实验结论】
用控制软件的编程可以使机器人达到行走的目的。
…… …… 余下全文
篇七 :工业机器人实验报告
西南科技大学
学生实验报告
实验课程名称 数字化设计与制造
开课实验室 智能机器人与虚拟模机实验室
学 院 制造学院 专业 过控 班级 1002
学生姓名 学 号
开课时间 2013 至 20## 学年第 一 学期
…… …… 余下全文
篇八 :机器人实训报告.doc
一、 机器人擂台赛
1、实训目的
机器人擂台赛的目的在于促进智能机器人技术(尤其是自主识别、自主决策技术)的普及。参赛队需要在规则范围内以各自组装或者自制的自主机器人互相搏击,并争取在比赛中获胜,以对抗性竞技的形式来推动相关机器人技术在大学生、青少年中的普及与发展。可以用自己设计的机器人来参加擂台赛,同时掌握这个环节所展现出来的机器人技术。
机器人擂台赛未来的发展目标是:比赛中,两个使用双腿自主行走的仿人形机器人互相搏击并将对方打倒或者打下擂台。
2、实训要求
在指定的大小擂台上有双方机器人。 双方机器人模拟中国古代擂台搏击的规则,互相击打或者推挤。如果一方机器人整体离开擂台区域或者不能再继续行动,则另一方获胜。机器人大小要求长、宽、高分别不能超过30cm、30cm、40cm 。
比赛场地大小为长、宽分别为是 2400 mm的台,台上表面即为擂台场地。有黑色的胶布围成。 比赛开始后, 围栏内区域不得有任何障碍物或人。
…… …… 余下全文