机器人活动工作总结
机器人世界工作总结
半年的工作即将结束,现将半学期的工作做以梳理。由于我们机器人教研组的特殊性,一个人不可以独立完成全部的工作,大多是四名同志分工合作,所以这个总结中所列所写都是我们团队成员共同完成的工作。
本学期在中心和部门领导的带领下,我们圆满的完成了本学期的机器人教学、比赛工作。下面我分三个方面加以总结。
一、中心日常工作。
积极参加政治、业务学习,编撰校本教材、俱乐部活动教材。保质保量的完成中心各部门分给的教育教学任务。开展教研活动,教学研究,不断学习提高自己的业务能力,团队凝聚力强。
二、每周固定工作。
由于下面学校的机器人教师的师资力量不足,我们组这学期继续承担基地校的二课活动。具体安排如下:

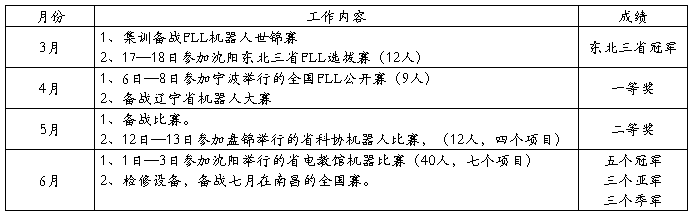
三、3—7月具体工作
早在放假时我就害怕今年的开学,我们把这学期戏称为黑色上半年。原因就是这学期的比赛任务非常重,几乎每月都有。由于机器人教学的特殊性,短期的集训想取得好成绩是不可能的,学生必须通过系统、科学的学习和训练才能取得优异的成绩。特别的家长更是注重结果,所以来自方方面面的压力很大。开学初我们就制定详细的月工作计划,现在均已完成,而且收获颇丰。
一个学期的工作充实而紧张,忙碌而有序。一路走来,感谢我们团队成员们的精诚合作、感谢领导们的大力支持。展望未来,相信在领导的带领下,在我们的共同努力下,不断总结,勇于探索,机器人课程一定会越来越受广大学生家长的欢迎,工作将越做越细,越做越好!
20##年6月
第二篇:机器人设计工作总结
机器人设计工作总结
一、作品标题:
立体式停车场
二、制作者名单:
我们的组号为07,组长是XXX,组员包括XXX和XXX
三、选题意义和目的:
由于在生活中停车问题是一个比较麻烦的问题,传统的停车场都是在水平平面上的,导致很严重的资源浪费。为了减少由于停车而产生的用地,我们设计了这个立体式停车场,旨在能够为我们生活中解决停车难问题提供一个全新的思路。
四、结构方案设计:
我们的模型结构主要分为两部分,第一部分是三维的停车场部分,这一部分不需要马达,开关等重要部件,只需要利用一些固体零件搭建出一个停车场的框架即可。这其中需要考虑车库的大小,数量等,最重要的要考虑是停车场的稳定性,使其不论遇到什么样的撞击都不会变形或者错位等。
第二部分是运输部分,这也是整个作品最重要的部分。它将实现把车运送到指定车库的功能。在这里我们用到了三个马达,分别控制X,Y,Z三个方向的运动,并用到了三个开关,分别用来判断三个方向上的运行位置。但在实现的过程中,我们遇到了重力不均的情况,也就是结构不稳定,易偏斜的情况。对此,我们采用了配重的办法,使得这一问题得到了很好的解决。我们还采用了计数的程序使得开关的使用数量大大减少。
五、实现功能简介:
以存车为例,涉及的基本过程如下:
1.将货物放在传送板上后,在程序Terminal上输入所要到达的楼层,例如第二层,第三个空位。
2.在传送装置向前运行的过程中,通过判断触碰触发开关的次数,进行横向定点的确定,本例中即开关触碰三次。
3.横向定位之后装置在横向固定不动,开始纵向上升,同样也是通过开关模拟计数,开关触碰两次之后停止。
4.运送装置通过触碰开关将货物运送到指定位置。
5.传送装置回到最初位置。
取车过程的功能与操作和停车相反。本机器人运用三个马达的简单组合,实现了小车在前进、上升以及传送三个维度的定位,并且能够根据需要进行定点定位的存取车。
六、本人在本次作业中主要工作:
在这次机器人设计中,我负责的主要工作是进行程序的编写和修正程序中bug。
七、收获与心得体会级作品的优缺点:
在这次作业中,我收获了很多。由于这是我第一次进行程序设计。所以在程序编写后进行调试的过程中,程序出现了好几个bug:第一个bug是计数重复,第二个bug是坐标(1,
1)无法实现正常的马达运转。在老师和同组成员的帮助下,我成功的解决了这些bug。发现并解决这些bug让我认识到了程序补丁包的重要性,也体会到了编程人员的辛苦之处。而每一个程序的编写是很多人的心血,是花费很多的经历的,所以我们要尊重别人编写的程序的专利权。通过这次与另外两个同学和合作活动,也让我认识到了团体的重要性,正是我们小团体的精确分工与合作,才能在这个短短的时间里成功完成了这次大作业的设计和完成。
最终作品的优缺点:
这个作品的优点:
1是用少量的开关和马达实现了再平面空间上多个坐标的定位。
2用一个包含子程序的程序实现了存车和取车两个工作状态的统一。
这个作品的缺点:
1由于计数开关数量较少,只能通过同一个开关进行判定一个维度上的坐标,导致系统的稳定性下降。
2由于在竖直平面上进行大面积的移动(其中包括三个马达和三个定位开关),所以导致接线较复杂,容易被影响,导致立体车库的稳定性下降。
3由于考虑到材料的限制和减少导线。我们并没有设计复位开关,所以一旦程序中间停止,我们就需要运行额外的复位程序并手动控制才能实现复位的要求。
八、总结:
这次机器人大作业让我们得到了很好的锻炼,增强了我们的动手能力和组织能力。开拓了我们的思维,丰富了我们的教学方式,让我们受益良多。
九、参考文献
《惠鱼创意机器人设计与实践教程》 曲凌编 上海交通大学出版社
附录:
程序设计的思想
定位:在竖直平面上的X和Y坐标设立激发定位开关的标记,程序中定义两个函数,初始值为0,每当对应的定位开关经过一个坐标标记后激发开关计数,开关每被激发一次函数值加一,并与输入的坐标值做比较,当两者相同时马达停转到达指定坐标,否则继续往目标方向前进;
存取车:存取车的实现是在子程序中进行的,改变Y坐标与Z坐标两个马达的运转顺序即可实现两种完全相反的功能,存车的具体顺序是Y马达上升1.5秒后停止,Z马达前进到制定位置后Y发达复位该坐标的标记处,Z马达后退到原始位置。而取车则是Z马达前进到制定位置后,Y马达上升1.5秒,然后Z坐标后退然后Y马达复位。子程序有两个输入端口,其中一个是存车,另一个是取车,在进行子程序之间先判定,若为1则接入存车端口,0则接入取车端口。
复位:平台的复位时与定位是相反,每次开关激发是将函数值减1后并与1进行判断,而不是0(这是程序初稿放的错误)。当函数等于1时马达继续运行3秒后停止,防止马达在开关被激发处停下,影响下次判定。
-
电脑机器人活动总结
电脑机器人活动总结为了更好的开展机器人活动,我校从本学期全力开展电脑机器人活动。通过学校几位信息教师的共同努力,各方的积极配合,在…
-
机器人兴趣小组活动总结与反思
机器人兴趣小组活动总结与反思时间过的真快,转眼就又到年底了,经过了一学期机器人活动小组的教学,感觉大家的收获还是很大的。这学期的机…
-
机器人兴趣小组活动总结
机器人兴趣小组活动总结蒋振东时间过的真快,转眼就又到学年底了,经过了一学年机器人活动小组的教学,感觉大家的收获还是很大的。本学期我…
-
小学机器人活动总结
攀枝花市仁和区东风小学开展青少年机器人创新实践活动情况总结为进一步推动我校机器人活动的普及与发展培养学生对科技制作的兴趣促进学生整…
-
电脑机器人活动总结
电脑机器人活动总结为进一步推行素质教育培养青少年的实践能力和创新精神在成都市科协的领导下我校本学期认真开展电脑机器人活动通过老师的…
-
机器人比赛总结
20xx中国柳州青少年机械奥运城际赛汇报指导老师:吴金湖、成志慧、陈景(共3人)参赛学生:吴昆霖、韦容奕、李玉泉、成翼驰、陈文韬、…
-
机器人兴趣小组活动总结与反思
机器人兴趣小组活动总结与反思时间过的真快,转眼就又到年底了,经过了一学期机器人活动小组的教学,感觉大家的收获还是很大的。这学期的机…
-
深圳市机器人与自动化发展国际研讨会总结报告
深圳市机器人与自动化发展国际研讨会总结报告深圳市机器人与自动化发展国际研讨会是由深圳市科技创新委员会举办,并由香港城市大学深圳研究…
-
机器人大赛总结报告
机器人大赛总结报告机器人大赛是一个极富挑战性的学术竞赛。它不仅水准高,难度大,综合性强,而且投资巨大的新兴学科。我们之所以有机会参…
-
机器人兴趣小组活动总结
机器人兴趣小组活动总结蒋振东时间过的真快,转眼就又到学年底了,经过了一学年机器人活动小组的教学,感觉大家的收获还是很大的。本学期我…
-
机器人培训总结
20xx年江苏省中等职业学校机器人技术应用专业教师技能竞赛培训总结——南通市广播电视大学朱云开本人于20xx年x月x日至7月x日参…