简单机械知识总结
简单机械知识总结
----杠杆
一、 杠杆的定义
杠杆没有形状的限制,可方、可圆、可直、可弯,只强调“硬”字,当力作用在杠杆上时物体的形变可以忽略,力的作用是使杠杆转动或阻碍杠杆转动。
二、 杠杆的要素
1.三点:支点、动力作用点、阻力作用点。这三点都在杠杆上,但是没有位置顺序的限制,也就是说支点可以在中间,力的作用点也可以在中间(见杠杆示意图)
2.二力:动力和阻力是杠杆受到的力,是其它物体施加在杠杆上的力,而不是杠杆施加给其它物体的力,即杠杆是受力物体。力的方向可以相同,也可以相反。其中一个力让杠杆顺时针转动,另一个力让杠杆逆时针转动。动力和阻力也没有限制,只是为了方便,规定其中一个为动力,另一个为阻力。
3.二力臂:力臂是“点”到“线”的距离,“点”指的是“支点”,“线”指的是“力的作用线”,力臂与力的作用线应该是垂直关系。力臂的表示方法:一是实线,两端加箭头;二是虚线,外加大括号。两个力臂之和可以大于、等于、小于杠杆长度。
滑轮
一、定滑轮
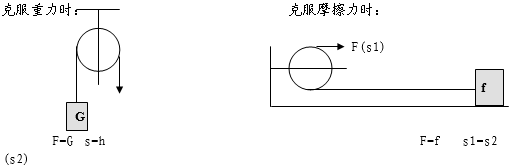
定滑轮的实质是以圆心为支点,以半径为力臂的等臂杠杆。定滑轮可以改变用力方向但不能省力。
定滑轮中动力与阻力的关系、动力作用点与阻力作用点移动的距离关系。
二、动滑轮
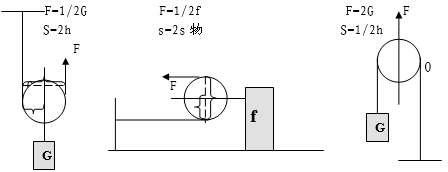
动滑轮的实质是动力臂为阻力臂2倍的省力杠杆(1.支点不是圆心;2.有时费力)
注意:
1. 判断是定滑轮还是动滑轮,关键是看它的轴是否随物体一起运动。拉动绳子时,物体移动,滑轮转动,但定滑轮轴的位置不动,动滑轮轴的位置随物体移动。
2. 分析动力、阻力的关系时,如果是将物体向上提升,克服的是物体的重力,水平拉动物体时克服的是物体与水平面的摩擦力。尤其要注意动滑轮有省力和费力两种情况。
3. 上面动力和阻力的关系成立的条件是动滑轮的重力、绳子的重力、轮与轴之间的摩擦力忽略不计。如果考虑动滑轮的重力将物体升高时F=1/2(G物+G动),距离之间的关系不受此影响。
三、滑轮组
1.滑轮组的特点:滑轮组是由若干定滑轮和动滑轮组成的,因此也综合了定滑轮和动滑轮的优点,既可以省力,又可以改变用力的方向。(不是所有滑轮组都一定改变用力的方向)滑轮组有几段绳子承担阻力,动力便是阻力的几分之一,绳子自由端移动的距离便是物体移动距离的几倍。
2.使用滑轮组时确定承担阻力的绳子段数n的方法。
(1)采用分割法:在动滑轮和定滑轮之间画一条虚线,将它们隔离开来,只算绕在动滑轮上的绳子段数。(包括拴在动滑轮框上和最后从动滑轮引出的拉绳,而跨过定滑轮的绳子和最后从定滑轮引出的拉绳,只起改变用力方向的作用)(见下图)
(2)计算法:首先确定动滑轮的个数n动和绳子的固定端,如果是固定在定滑轮上则n=2n动;如果固定在动滑轮上则n=2n动+1。
3.滑轮组的省力情况分析
(1) 滑轮组竖放将物体匀速升高时克服的是物体的重力,F=1/n*G. s=nh
此式成立的条件是动滑轮的重力、绳子的重力、轮与轴之间的摩擦力忽略不计,如果考虑动滑轮的重力将物体升高时F=1/n(G物+G动),距离间的关系不受此影响。
(2) 滑轮组横放水平匀速拉动物体时克服的是物体与水平面的摩擦力f,不计绳与滑轮之间的摩擦力时F=1/nf, s=ns物
任何简单机械省力时费距离,省距离时费力,没有都省的,也没有都费的。
4.滑轮组组装题的思路分析
1 首先利用已知条件求出绳子的段数n。
①如果已知物重G和绳子的最大拉力F,根据公式n≥G/F可求出绳子的段数n,n如果不是整数,要取稍大一些的整数。②如果已知物重G、绳端的实际拉力F和滑轮组的机械效率η,可利用公式 n=G/Fη求出绳子的段数n,利用此公式求出的n本身就是整数。③如果知道钩码上升的高度h和弹簧测力计移动的距离s,可利用公式n=s/h求出绳子的段数n,利用此公式求出的n本身也是整数。
2 利用绳子的段数n来决定动滑轮的个数 N。在滑轮组中,定滑轮是用来改变力的方向的,动滑轮的使用方法决定着该滑轮组的省力情况,根据n=2N或n=2N+1,可以得出动滑轮的个数N。
3 判定定滑轮的个数。
①如果要求用最少的滑轮个数来组装,则当n为偶数时,定滑轮的个数比动滑轮的个数少一个既可满足要求,当n为奇数时,定滑轮的个数等于动滑轮的个数才能满足要求。
②如果要求站在地面上拉物体,隐含的条件是绳端受到拉力的方向是向下的,则需要在上一要求的基础上加一个定滑轮来改变拉力的方向。
第二篇:第十二章简单机械知识点总结
第十二章 简单机械
一、杠杆
定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
说明:①杠杆可直可曲,形状任意。
②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。
五要素──组成杠杆示意图。

①支点:杠杆绕着转动的点。用字母O表示。
②动力:使杠杆转动的力。用字母F1表示。
③阻力:阻碍杠杆转动的力。用字母F2表示。
说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。
动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反。
④动力臂:从支点到动力作用线的距离。用字母L1表示。
⑤阻力臂:从支点到阻力作用线的距离。用字母L2表示。
画力臂方法:一找支点、二画线、三连距离、四标签。
⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作垂线);⑷标力臂(大括号)。
研究杠杆的平衡条件:
杠杆平衡是指:杠杆静止或匀速转动。
实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从杠杆上量出力臂。
结论:杠杆的平衡条件(或杠杆原理)是:
动力×动力臂=阻力×阻力臂。写成公式F1L1=F2L2也可写成:F1/F2=L2/L1。
解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。)
解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到:①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。
4.应用:
|
名称 |
结 构特 征 |
特 点 |
应用举例 |
|
省力 杠杆 |
动力臂大于阻力臂 |
省力、费距离 |
撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车、花枝剪刀 |
|
费力 杠杆 |
动力臂小于阻力臂 |
费力、省距离 |
缝纫机踏板、起重臂、人的前臂、理发剪刀、钓鱼杆 |
|
等臂 杠杆 |
动力臂等于阻力臂 |
不省力不费力 |
天平,定滑轮 |
说明:应根据实际来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。
二、滑轮
1.定滑轮:


①定义:中间的轴固定不动的滑轮。
②实质:定滑轮的实质是:等臂杠杆。
③特点:使用定滑轮不能省力但是能改变动力的方向。
④对理想的定滑轮(不计轮轴间摩擦)F=G。
绳子自由端移动距离SF(或速度vF)=重物移动的距离SG(或速度vG)
2.动滑轮:


①定义:和重物一起移动的滑轮。(可上下移动,也可左右移动)
②实质:动滑轮的实质是:动力臂为阻力臂2倍的省力杠杆。
③特点:使用动滑轮能省一半的力,但不能改变动力的方向。
④理想的动滑轮(不计轴间摩擦和动滑轮重力)则:F= G只忽略轮轴间的摩擦则,拉力F=
G只忽略轮轴间的摩擦则,拉力F= (G物+G动)绳子自由端移动距离SF(或vF)=2倍的重物移动的距离SG(或vG)
(G物+G动)绳子自由端移动距离SF(或vF)=2倍的重物移动的距离SG(或vG)
3.滑轮组
①定义:定滑轮、动滑轮组合成滑轮组。
②特点:使用滑轮组既能省力又能改变动力的方向。
③理想的滑轮组(不计轮轴间的摩擦和动滑轮的重力)拉力F= G。只忽略轮轴间的摩擦,则拉力F=
G。只忽略轮轴间的摩擦,则拉力F= (G物+G动)。绳子自由端移动距离SF(或vF)=n倍的重物移动的距离SG(或vG)。
(G物+G动)。绳子自由端移动距离SF(或vF)=n倍的重物移动的距离SG(或vG)。
④组装滑轮组方法:首先根据公式n=(G物+G动)/F求出绳子的股数。然后根据“奇动偶定”的原则。结合题目的具体要求组装滑轮。
三、机械效率:
1、有用功:定义:对人们有用的功。
公式:W有用=Gh(提升重物)=W总-W额=ηW总
斜面:W有用= Gh
2、额外功:定义:并非我们需要但又不得不做的功
公式:W额= W总-W有用=G动h(忽略轮轴摩擦的动滑轮、滑轮组)
斜面:W额=f L
3、总功: 定义:有用功加额外功或动力所做的功
公式:W总=W有用+W额=FS= W有用/η
斜面:W总= fL+Gh=FL
4、机械效率:① 定义:有用功跟总功的比值。
 ② 公式:
② 公式:
斜 面:
定滑轮:
动滑轮:
滑轮组
③ 有用功总小于总功,所以机械效率总小于1 。通常用 百分数 表示。某滑轮 机械效率为60%表 示有用功占总功的60% 。
④提高机械效率的方法:减小机械自重、减小机件间的摩擦。
 5、机械效率的测量:
5、机械效率的测量:
① 原 理:
②应测物理量:钩码重力G、钩码提升的高度h、拉力F、绳的自由端移动的距离S
③器 材:除钩码、铁架台、滑轮、细线外还需 刻度尺、弹簧测力计。
④步骤:必须匀速拉动弹簧测力计使钩码升高,目的:保证测力计示数大小不变。
⑤结论:影响滑轮组机械效率高低的主要因素有:
A动滑轮越重,个数越多则额外功相对就多。
B提升重物越重,做的有用功相对就多。
C 摩擦,若各种摩擦越大做的额外功就多。
绕线方法和重物提升高度不影响滑轮机械效率。
-
初三物理人教版简单机械知识点总结
人教版简单机械知识点总结杠杆一、杠杆1、定义:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就叫杠杆。(1)“硬棒”不一定是棒,…
-
12章简单机械知识点总结
第十二章:简单机械知识点:一、杠杆:(一)、定义:在力的作用下绕着固定点转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。(二)、…
-
第十二章简单机械知识点总结
第十二章简单机械一、杠杆(1)定义:在力的作用下绕着固定点转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。②有些情况下,可将杠杆…
-
初三物理人教版简单机械知识点总结
人教版简单机械知识点总结杠杆一、杠杆1、定义:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就叫杠杆。(1)“硬棒”不一定是棒,…
-
第十二章简单机械知识点总结
第十二章简单机械一、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。②有些情况下,可将杠杆实际转…
-
苏教版《简单机械和功》知识点归纳
第十一章、简单机械和功(一)杠杆1、杠杆:在力的作用下可以绕一固定点转动的硬棒叫做杠杆。2、杠杆的5个要素:①支点:杠杆绕着转动的…
-
初三物理人教版简单机械知识点总结
人教版简单机械知识点总结杠杆一、杠杆1、定义:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就叫杠杆。(1)“硬棒”不一定是棒,…
-
第十二章简单机械知识点总结
第十二章简单机械一、杠杆1定义:在力的作用下绕着固定点转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。②有些情况下,可将杠杆实际…
-
第十二章简单机械知识点总结
第十二章简单机械第一节杠杆一.1.(见教材76页)定义:在的作用下绕着转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。②有些情况…
-
江西省萍乡市芦溪县宣风镇中学中考物理复习 物理简单机械和功知识点总结 新人教版
江西省萍乡市芦溪县宣风镇中学中考物理复习物理简单机械和功知识点总结新人教版一、认识和利用杠杆1、杠杆(1)杠杆的定义:在力的作用下…