飞行力学课程实验报告39051418-马骏

《飞行力学》课程实验
实验报告
院系 航空科学与工程学院
学号 39051418
姓名 马骏
目录
模拟飞行实验一:基本航线飞行... 1
一、实验目的... 1
二、实验仪器和设备... 1
三、实验原理... 1
四、实验... 1
五、实验报告要求... 2
六、思考题... 3
模拟飞行实验二:飞机典型运动模态激发... 4
一、实验目的... 4
二、实验仪器和设备... 4
三、实验原理... 4
四、实验... 4
五、实验报告要求... 8
六、思考题... 8
模拟飞行实验一:基本航线飞行
一、实验目的
1.了解地面飞行模拟器及其工作原理
2.了解教练机和现代战斗机的座舱仪表特点
3.熟悉基本航线飞行的要点
二、实验仪器和设备
1.歼八-Ⅱ教学飞行模拟器
三、实验原理
参阅:
1.王维军编. 飞行仿真课程实验指导书. 北航509教研室, 1996
2.王行仁主编. 飞行实时仿真系统及技术. 北京航空航天大学出版社, 1998
3.王正中等编著. 现代计算机仿真技术及其应用. 国防工业出版社, 1991
4.熊光楞,彭毅等编著. 先进仿真技术与仿真环境. 国防工业出版社, 1997
四、实验
实验准备:
1.实验前预习飞行模拟仿真原理;
2.听取实验指导教师介绍:实验室设备功能与原理;本次实验参数要点;起飞、着陆、定直平飞模拟操纵技术特点。
3.拟定基本操纵方案,其中须覆盖下列任务要求:
1)起飞并上升到预定条件H=5000m, M=0.4;
2)平缓加速到 M=0.7,又平缓减速到M=0.4,要求高度基本保持不变;
3)分别在H=5000m, M=0.4和M=0.7,对比纵向操纵特点;
4)返航并着陆。
(操纵方案需经小组充分讨论。)
实验过程:
1.加电、开机,硬件、软件初始化;
2.仔细观察实验指导教师的演示;
3.分组轮换进行模拟飞行实验,在预定时间内完成所有要求的任务,并正确记录数据。
五、实验报告要求
1. 简述本次实验所用模拟器基本原理和配置;
基本原理:通过个系统的协调工作,感知、接受驾驶员的操作动作,传送至计算机进行仿真模拟计算,将相应的计算结果以图像的形式传送到显示系统和传动系统,被驾驶员感知。
配置:运动和触觉系统:操纵杆,油门,起落架、襟翼收放操纵按钮等;图像生成系统:生成仪表界面和飞行视界界面;仿真计算机:对操纵参数和飞行参数等进行计算和处理,并输出相关信息;跟踪系统:跟踪“驾驶员”操纵时手部及其他部位输入的操纵;可视化显示设备:包括CRT显示器和到投影仪
2. 描述整个起降航线的操纵过程;
起飞过程:在模拟实验中,直接推油门达到最大推力滑跑,在起飞速度达约0.2马赫后拉杆,机头抬起两轮滑跑,保持一定的爬升角起飞。到达安全高度后收襟翼、平飞加速,稳定到某一速度。
平飞过程:要从0.4马赫增加到0.7马赫,而高度不变,故为了减小升力系数需要推杆以减小迎角。到达0.7马赫后减小发动机推力一稳定速度。之后可以发现,此时舵面的操纵特性好很多。
降落过程:找准机场跑道后,推杆,收油门,使飞机降落到一定高度后,放起落架,释放襟翼,保持低速着陆。(基本没有成功)
3. 回答思考题中的问题。
六、思考题
1. 飞机起飞有哪些技术要领和关键参数?
答:
技术要领:掌握拉杆起飞时的速度、滑跑距离,收放起落架和襟翼的速度、高度等;
关键参数:滑跑距离、起飞距离、起飞时间、离地速度
2. 飞机着陆有哪些技术要领和关键参数?困难在哪里?
答:
技术要领:着陆前通场准备工作,安全高度的掌握,图2中拉杆高度、速度的掌握等。
关键参数:着陆距离、滑跑距离、着陆时间、接地速度。
困难:减速达到要求的范围并且能过对准跑道,控制好离地距离。
3. H=5000m, M=0.4和M=0.7的纵向操纵有什么不同特点?为什么?
答:
M=0.7 时比M=0.4时纵向操纵使飞机保持平衡时所需要的舵偏角要小。
因为,对于具有静稳定性的飞机,
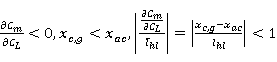 ,
,
故其纵向操纵性指标
即:速度越大,舵偏角越小。
模拟飞行实验二:飞机典型运动模态激发
一、实验目的
1.掌握常规布局飞机的模态特点
2.了解重心后移对稳定性的影响
二、实验仪器和设备
1.教学飞行模拟器
2.数据后置处理计算机
三、实验原理
参阅:
1.王维军编. 飞行仿真课程实验指导书. 北航509教研室, 1996
2.方振平,陈万春,张曙光编. 航空飞行器飞行动力学. 北京航空航天大学出版社,2005
3.熊海泉等编. 飞机飞行力学. 航空专业教材编审组,1990
4.Etkin B. Aircraft Dynamics –Stability and Control (3rd ed.). John Wiley &Sons, Inc., 1996
四、实验
实验准备:
1.实验前复习有关飞机典型运动模态的内容;
2.听取实验指导教师介绍:模拟控制台参数设置方法;脉冲操纵方式的特点;模态参数的模拟飞行实验提取方法;
3.拟定模拟状态点和基本操纵方案,其中须覆盖下列任务要求:
1)在某巡航状态激发典型的纵向运动和横航向运动典型模态;
2)对比重心后移后,纵向模态特点的变化。
(状态点和操纵方案需经小组充分讨论。)
实验过程:
1.加电、开机,硬件、软件初始化;
2.仔细观察实验指导教师的演示;
3.分组轮换进行模拟飞行实验,在预定时间内完成所有要求的任务,并正确记录数据。
数据处理:
1.根据记录数据,提取与任务要求相关的模拟飞行段数据,并绘制曲线;
(1)实验一关于纵向模态的激发:
研究飞机的纵向响应特性操纵输入常见的有:油门操纵、升降舵操纵、鸭翼、前后缘襟翼、扰流片等,本实验采取的是给升降舵一个阶跃输入。
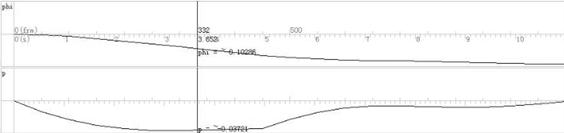
短周期模态运动周期为零点几秒到几秒,主要运动变量为迎角和飞机姿态角,飞机的飞行速度变化量很小。观察变量 俯仰角theta 迎角alpha 俯仰角速度q
如下图:
[1]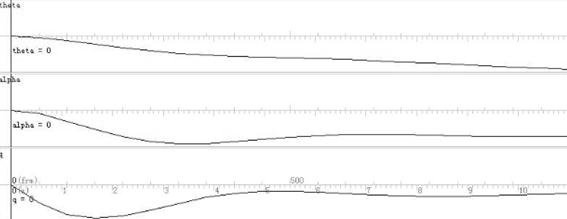
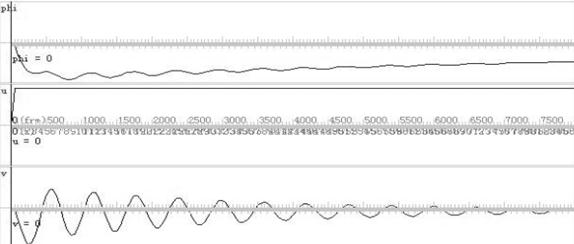
(2)实验二荷兰滚模态:偏航运动略超前滚转,即左偏航时右滚转。模态频率高,周期约为数秒至十几秒,介于长短周期之间。观察变量 滚转角phi 侧滑角β(用侧向速度v表现)
(3)实验三滚转模态:特征是衰减很快的非周期运动,其振幅衰减一半的时间仅为零点几秒,飞机收横测扰动后,飞机绕机体轴的但自由度滚转,收敛过程很快。观察变量 滚转角phi 滚转角速度p
(4)实验四短周期模态,静不稳定性。观察变量 俯仰角theta 迎角alpha 俯仰角速度p 
结果分析
1、飞机常用的操纵手段主要有副翼操纵,方向舵操纵,油门操纵
2、飞机横航向模态模拟时,主要了解滚转模态和荷兰滚模态,而这两种模态的主要区别是时间要求不同,0~10秒主要表现为滚转模态,滚转角的反复变化直到稳定。而在0~30秒或0~40秒区间上,主要表现为荷兰滚模态,除了滚转角的变化外,最明显的是侧滑角的周期性变化。
3、飞机的纵向动稳定性的好坏一般以其短周期模态的特征参数来评定,即在纵向动稳定性方面,我们关心短周期模态中迎角,俯仰角和俯仰角速度的变化。从所得的实验结果中,可以看到,静稳定飞机会在扰动后达到一个稳定值。由于施加的是阶跃响应,在俯仰角速度和迎角达到一个稳定值后,俯仰角还在一直变化。
4、飞机重心后移对飞机纵向模态有明显的影响,尤其是当飞机变得静不稳定时。如实验图像所示,在kp=0 kn=0.3和kp=10,kn=10时,都有模态发散现象的发生。
2. 回答思考题中的问题。
五、实验报告要求
1.提交数据处理结果,并进行必要的分析;
2.回答思考题中的问题。
六、思考题
1. 模态参数辨识实验常用的飞行操纵方式有哪些?
答:实验中常用的飞行操纵方式包括:横向操纵:副翼输入、方向舵输入;纵向操纵:油门输入、升降舵输入.输入的模型常有:阶跃输入、脉冲输入、正弦输入、随机输入等;
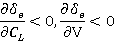
2. 纵向扰动运动模态如何随重心变化?
答:本实验中,当重心后移后,飞机的纵向稳定性降低,握杆机动裕度下降,再往后移会静不稳定。纵向模态发散。
[1]注:以下各图速度单位均为m/s,角度单位均为deg,部分图略去。
第二篇:《变形监测数据处理》课程实验课指导书(含实验报告)
《变形观测数据处理》
实验指导书
吉林大学地探学院测绘工程系
20##年01月10 日
测量实验注意事项
1. 实验之前必须阅读有关的教材及实验指导书,了解实验内容要求和步骤。
2. 实验记录应用正楷填写,不可潦草,并按规定的填写日期、仪器名称、仪器号码、使用人、仪器状态。
3. 使用计算机过程中要按照指导教师的要求去做,不可随意删除计算机内其它文件。不可随意更换页面。
4. 没经过指导教师与实验室老师的允许不可随意拷入其它软件。
5. 实验结束后应把实验报告上交指导教师审阅,符合要求方可离开。
6. 实验结束后应关闭电源,清理桌面、清扫地面。
实验室仪器操作细则
1. 对实验室内的计算机必须爱护,不可随意搬动。
2. 使用时先打开电源。
3. 点击所要使用遥感和地理信息系统的有关软件。
4. 实验完成之后保存实验图象,退出使用界面。
5. 实验完毕应关闭计算机电源。
6.一切仪器若发生故障,应及时向指导教师或实验室工作人员回报,不得自行处理,若有损坏,遗失应写书面检查,进行登记、酌情赔偿。
实验一、变形监测数据处理认识实习
实验类别:演示
实验学时:2学时
实验地点:建筑工地
实验依据:《变形监测数据处理》实验课教学大纲
实验仪器与工具:无
实验目的与要求:通过对变形监测点布设的认识
实验内容与步骤:参观变形监测点的布设以及观测方法
实验注意事项:由于是到建筑工地参观,注意安全
实验耗材:无
应交成果:实验结果与实验报告
一、 实验报告要求
实验报告主要是针对实验过程和结果对实验目的的理解和掌握程度,对所得实验结果进行分析、评价,指出注意事项和对本实验提出建议。
《变形监测认识实习》实验报告
报告人: 年 月 日

实验二、建立一元线性回归方程
实验类别:常规
实验学时:2
实验地点:计算机实验室,地质宫108
实验依据:《变形监测数据处理》实验课教学大纲
实验仪器与工具:计算机,打印机
实验目的与要求:利用MATLAB软件判断是否变形监测数据间是否线性相关,并建立一元线性回归方程。
实验内容与步骤:见后面的详细实习指导
实验注意事项:由于数据量比较大,输入数据时要仔细认真
实验耗材:打印纸
应交成果:实验结果与实验报告
二、 实验报告要求
实验报告主要是针对实验过程和结果对实验目的的理解和掌握程度,对所得实验结果进行分析、评价,指出注意事项和对本实验提出建议。
《实习步骤:
n 在启动Matalab之后,建立自己的工作目录。如图,
n  然后输入数据。
然后输入数据。
主要是建立矩阵。可以在命令窗口中输入数据。各个矩阵元素之间用“,”逗号隔开。不同的行之间用“;”分号隔开(对于本次的实习不存在这个问题)。如图:
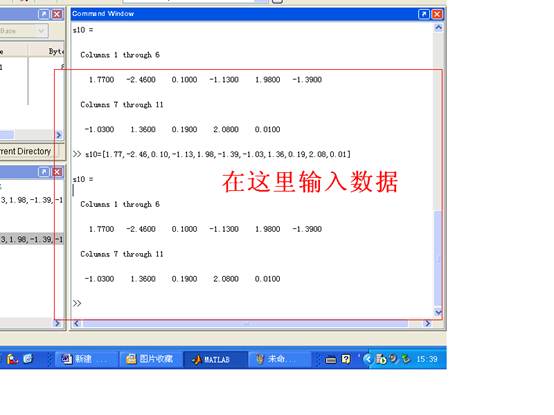
这样变量s10变存储矩阵。
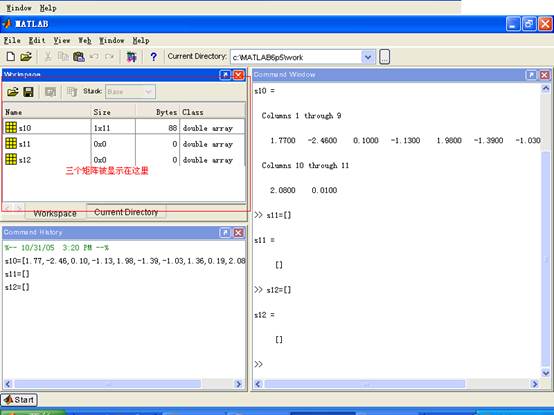
如此分别输入三个矩阵并分别命名为s10、s11、s12。
这时候在旁边的WORKSPACE窗体中可以看到这三个矩阵。
n 判断线性相关
我们知道只有当变量之间存在着线性相关关系的时候才可以进行线性回归分析。
接下来要判断是否存在着线性相关关系。使用函数corrcoef(x,y)来计算s10、s11、s12之间的相关系数,如图:可以看到他们自相关系数为1,相关系数为0.9863。通过查相关系数检验法的临界值(书中的P56的表格),要求置信水平位1%可以判断出,是两两线性相关的。
然后计算出所有的两两之间的相关系数。并判断是否线性相关。
n 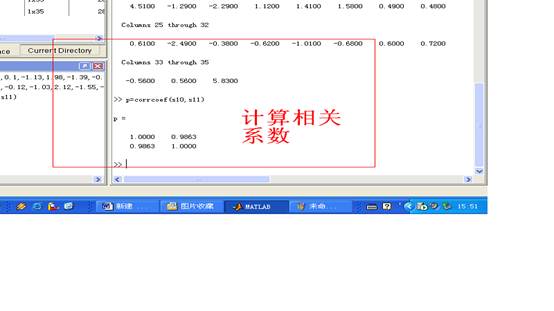 接下来要建立两两之间的回归方程。利用函数polyfit(x,y,1),如图:
接下来要建立两两之间的回归方程。利用函数polyfit(x,y,1),如图:
 polyfit(x,y,m)是matlab中利用最小二乘法来获得多项式系数的函数。
polyfit(x,y,m)是matlab中利用最小二乘法来获得多项式系数的函数。
其中的x,y分别为自变量和因变量,m为多项式的次数。
依次建立坝段之间的回归方程,并分别地记录下来。
n 然后计算坝段10和坝段11的估值中误差,是利用回归值与实测值计算的(应该等于0.33)。
首先使用回归方程计算回归值。
H11=s10*0.983-0.013
得到回归值矩阵h11。
然后利用d=h11-s10。
得到回归值与实测值的差值d。
利用函数std(d,1,2)计算差值的标准方差。看看是否等于0.33。
在命令行中输入:dd=std(d,0,2)
根据是否大于三倍方差3dd,判断是否有观测值超限,是否需要返测。
建立一元线性回归方程》实验报告
报告人: 年 月 日

实验三、变形监测数据筛选
实验类别:常规
实验学时:2
实验地点:计算机实验室,地质宫108室
实验依据:《变形监测数据处理》实验课教学大纲
实验仪器与工具:计算机,打印机
实验目的与要求:利用MATLAB软件判断数据中是否含有超限误差,并使用B检验法、τ检验法、t检验法进行局部的粗差检验。
实验内容与步骤:见后面的实验步骤
实验注意事项:爱护实验计算机等相关设备
实验耗材:打印纸
应交成果:实验结果与实验报告
三、 实验报告要求
实验报告主要是针对实验过程和结果对实验目的的理解和掌握程度,对所得实验结果进行分析、评价,指出注意事项和对本实验提出建议。
实习步骤:
启动MATLAB后、首先输入必要的数据。
1. 首先生成数据观测值矩阵H0,方法与上次实习的相同。
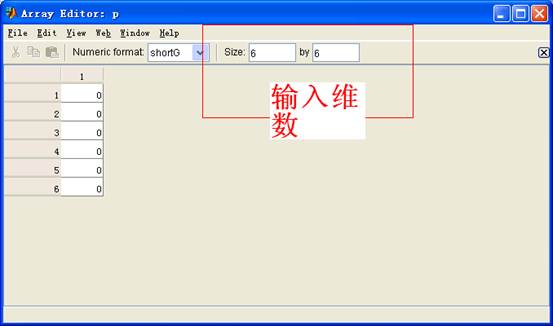
2. 然后输入权矩阵。由于权矩阵是个对角阵,因此可以使用比较简单的方法输入。
首先Command Window 中建立一个空的矩阵,输入命令P=[]。
然后到WORKSPACE 窗口中建立一个双击刚刚建立的矩阵,令其维数为6*6,如下图。
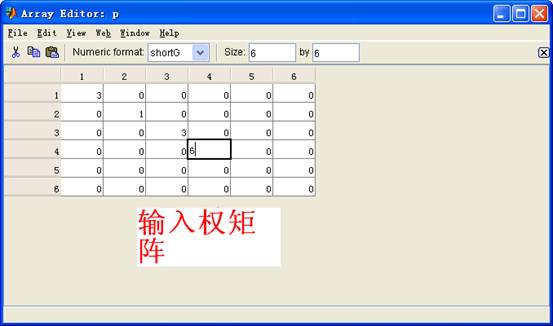
然后再输入必要的数据本书据中的,如下图。
3.  然后,求权矩阵的逆矩阵,即协因数矩阵。
然后,求权矩阵的逆矩阵,即协因数矩阵。
输入:QL=inv(P)
其中,inv为求逆矩阵命令,并将所求到的逆矩阵赋给了变量QL。
你可以在WORKSPACE窗口中查看你得到的协因数矩阵。
4. 输入图形矩阵。
由于我们使用的是间接平差法,所以所使用的图形矩阵也是不同的。我们这里就使用书中的图形矩阵,并把图形矩阵赋给变量A。
方法与输入权矩阵的方法相同。
5. 计算法方程系数N 和常数项向量。
然后求出法方程系数N、和常数项向量U。NX+U=0法方程。
N=ATPA。在命令行中输入:N=A ’ * P * A
U=A’*P*H0
6. 获得关于X的协因数矩阵QXX。
QXX=inv(N)。
然后求X=QXX*U
7. 求改正数。
V=A*X-H0
8. 求M=VTPV
M=V’*P*V
9. 求F ,我们已经知道σ=0.13,由于σ不好写因此使用字母S代替.
F=M/RS2 其中R 为多余观测数R=3.
F=M/R*(S*S)
查看F 数值,然后查看F分布在显著水平0.05下,自由度为(3,无穷大)的数值为:2.6。
判断是否有超限观测值。
10. 由于本例中含有超限误差,因此继续计算QV
QV=QL-A*QX*AT
至此整体检验已经完成。
进行局部检验:
由于需要计算 利用4-21式进行计算,
即是V除以QV对角线元素的开方。即使用一个临时变量TEMP存储计算结果。
首先使用函数提取QV对角线元素。
TEMP=V/diag(QV)
然后,开方TEMP=sqrt(TEMP)
然后将V中的数值与TEMP的数值依次对应相除。取其中最大的数值。
然后分别用B检验法、τ检验法、t检验法进行检验。
《数据筛选》实验报告
报告人: 年 月 日

利用平均间隙法对监测网中的不稳定点进行
检验与识别
实验类别:常规
实验学时:2
实验地点:计算机实验室,地质宫108室
实验依据:《变形监测数据处理》实验课教学大纲
实验仪器与工具:计算机、打印机
实验目的与要求:利用已经掌握知识的进行对图形作整体检验而后利用尝试法搜索不稳定点。
实验内容与步骤:见后面的详细实验步骤
实验注意事项:爱护实验计算机等相关设备
实验耗材:打印纸
应交成果:实验结果与实验报告
四、 实验报告要求
实验报告主要是针对实验过程和结果对实验目的的理解和掌握程度,对所得实验结果进行分析、评价,指出注意事项和对本实验提出建议。
实习步骤:
启动MATLAB后、首先输入必要的数据。
然后进行整体检验。
对于不稳定点的搜索,要注意:
其主要思想是对每一个点逐个判断。也就是说每当你对某个点判断的时候,需要重新划分矩阵?X 和P,以便方便地找到PFM,和PMF。
具体做法就是将你所要判断的点,在?X 和P矩阵中放到第一位(1*1)。例如:对于第三个点,将他的纵列从第三列移动到第一列的位置,然后在将横行从第三行移动到第一行。这样横容易就判断出:PFM和PMF。
同理也适用于?X。
《稳定点检验与识别》实验报告
报告人: 年 月 日
-
工程力学 实验力学 实验报告
实验一金属试件打磨以及贴片和焊线实验目的1掌握金属试件打磨方法2初步掌握电阻应变片的粘贴技术3初步掌握焊接和检查实验设备和器材1电…
-
南理工实验力学实验报告
一实验一材料循环应力应变曲线的探究实验目的通过对材料进行循环加载并利用所获取数据绘出材料的循环应力应变曲线认识与分析材料的循环特性…
-
实验力学实验报告
纯弯曲梁正应力电测实验一实验目的1电测法测定纯弯曲梁正应力分布规律2验证纯弯曲梁正应力计算公式3计算弹性模量E二实验装置与仪器1纯…
-
材料力学实验报告答案
材料力学实验报告评分标准拉伸实验报告一、实验目的(1分)1.测定低碳钢的强度指标(s、b)和塑性指标(、)。2.测定铸铁的强度极限…
-
材料力学实验报告
实验一拉伸实验一实验目的1测定低碳钢Q235的屈服点s强度极限b延伸率断面收缩率2测定铸铁的强度极限b3观察低碳钢拉伸过程中的各种…
-
纸飞机——实验报告
高中实验报告交大附中夏令营新高一实验名称如何让纸飞机飞得更久更远实验目的通过观察查找资料实验探究影响纸飞机飞行的因素设计并制作出一…
-
飞机升力实验报告
飞机升力演示实验报告实验目的通过实验了解飞机升力是如何产生的实验仪器飞机升力演示仪实验原理一般翼型的前端圆钝后端尖锐上表面拱起下表…
-
物理演示实验—飞机升力
物理演示实验飞机升力实验目的演示翼形升力的产生实验仪器飞机升力演示仪实验原理一般翼型的前端圆钝后端尖锐上表面拱起下表面较平呈鱼侧形…
-
1飞机的升力创新实验(1)
飞机的升力创新实验作者20xx级10班制作的目的该实验用于人教版初中物理第九章第四节流体压强与流速的关系中现行教材中教学飞机升力以…
-
飞行训练管理 实习报告
实习报告根据公司安排,20xx年x月x日,赴中国民航大学飞行训练管理处综合业务办公室进行为期两个月的实习。5月x日,赴朝阳飞行学院…