PID_自控原理实验报告
自动控制原理实验
一、 实验目的
(1) 了解数字PID控制的特点,控制方式。
(2) 理解和掌握连续控制系统的PID控制算法表达式。
(3)了解和掌握用试验箱进行数字PID控制过程。
(4) 观察和分析在标PID控制系统中,PID参数对系统性能的影响。
二、 实验内容
1、数字PID控制
一个控制系统中采用比例积分和微分控制方式控制,称之为PID控制。数字PID控制器原理简单,使用方便适应性强,可用于多种工业控制,鲁棒性强。可以用硬件实现,也可以用软件实现,也可以用如见硬件结合的形式实现。PID控制常见的是一种负反馈控制,在反馈控制系统中,自动调节器和被控对象构成一个闭合回路。模拟PID控制框图如下:
输出传递函数形式:
其中Kp为调节器的比例系数,Ti为调节器的积分常数,Td是调节器的微分常数。
2、被控对象数学模型的建立
1)建立模型结构
在工程中遇到的实际对象大多可以表示为带时延的一阶或二价惯性环节,故PID整定的方法多从这样的系统入手,考虑有时延的单容被控过程,其传递函数为:
这样的有时延的单容被控过程可以用两个惯性环节串联组成的自平衡双容被控过程来近似,本实验采用该方式作为实验被控对象,如图3-127所示。
2)被控对象参数的确认
对于这种用两个惯性环节串联组成的自平衡双容被控过程的被控对象,在工程中普遍采用单位阶跃输入实验辨识的方法确认和τ,以达到转换成有时延的单容被控过程的目的。单位阶跃输入实验辨识的原理方框如图3-127所示。
对于不同的 、
、 和K值,得到其单位阶跃输入响应曲线后,由和得到 和,再利用拉氏反变换公式得到
和K值,得到其单位阶跃输入响应曲线后,由和得到 和,再利用拉氏反变换公式得到
To= =
=
 =
= =
=
3、采样周期的选择
采样周期选择0.05s。
4、数字PID调节器控制参数的工程整定方法
虽然PID调节可全面、综合的考虑系统的各项性能,但在工程实际中,考虑到工程造价和调节器的易于实现,长采用PID三个参数来对系统进行校正。等效有时延单容被控对象的参数和τ,利用科恩库恩经验公式,可求得比例,比例-积分,比例-积分-微分的参数。
5、数字PID调节器控制特性
1)比例控制是一种最简单的控制方式,其控制的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差。如果系统是稳定的,增大比例调节的增益,可以减小系统的稳态误差。
2)积分控制中,控制器的输出与输入误差信号的积分成比例关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,为了消除稳态误差,在控制器中引入积分项。增大积分系数,提高系统的稳态控制精度,但太大会引起系统不稳定。
3)微分控制中,控制器的输出与输入误差信号的微分成正比关系。当存在较大的惯性组件或有滞后组件时,可能会出现震荡甚至不稳定。加入微分具有克服积分调节作用缓慢性,避免积分作用可能降低系统响应速度的缺点。对变化落后于误差变化的系统,需要增加微分性,它能预测误差变化的趋势。
三、实验内容及步骤
1、确立被控对象模型结构
此次实验采用两个惯性环节串接组成实验被控对象,=0.5s,=0.2s,
 (S)=
(S)= *
* ≈
≈
2、被控对象参数的确认
被控对象参数的确认构成如图3-136所示。本实验将函数发生器做信号发生输出矩形波施加于被测系统的输入端R,观察矩形波从0V阶跃到+1V时被控对象的单位阶跃响应曲线。
实验步骤如下:
1)、按照模拟电路图连接电路。采用函数发生器输出矩形波作为输入系统的输入,用虚拟示波器的两个通道分别采集系统的输入和输出信号。
2、运行相关的实验程序,选择“线性系统时域分析”——“启动试验项目”命令,弹出试验界面,调节实验机上函数发生器的“幅度调节”是矩形波的输出幅度为1.0V,调节“正脉宽调节”电位器使之输出≥2秒。
3)、单击“开始”按钮,根据波形调节X轴和Y轴的单位设置,得出完整波形。
4)、取 ,测得
,测得 的值;取
的值;取 ,测得
,测得 的值。
的值。
3、求得数字PID调节器控制参数及确定采样周期为0.05s。
4、数字PID闭环控制系统实验
数字PID闭环控制系统的构成如下图所示。此次实验将函数发生器作信号发生器,矩形波输出施加于被测系统的输入端 ,观察矩形波从0V阶跃到+2.5V,时被测系统的PID控制特性。
,观察矩形波从0V阶跃到+2.5V,时被测系统的PID控制特性。
实验步骤如下:
(1)按照模拟电路图连接( =2)。
=2)。
(2)运行、观察、记录。
①选择“离散控制系统分析”→“数字PID控制”→“启动实验项目”命令,弹出实验界面后,调节函数发生器使之矩形波输出幅度为2.5V,正脉冲输出宽度≥6s。
在实验界面“PID参数”设置区设置参数,设置 ,
, ,
,
 ,采样周期
,采样周期 ,然后单击“开始”按钮,运行实验程序。
,然后单击“开始”按钮,运行实验程序。
②在运行程序中,若修改PID参数后,须停止实验再单击“开始”按钮。
③单击“停止”按钮,观察实验结果,记录数字PID闭环控制系统实验响应曲线。
1、 ,
, ,
, ,
,
2、 ,
,
3、 ,
,
由 和
和 求出和
求出和
实验数据见下表:

5、根据用PID测得的Kp、Ti、Td进行Simulink仿真,得到三个响应曲线与上述三幅图进行对比:
1)、Kp=1.2、Ti=0.75、Td=0.053
2)、Kp=1.5、Ti=0.35、Td=0.053
3)、Kp=2、Ti=0.6、Td=0.053
四、实验总结
通过本次学习学会了通过对PID系数的控制来调节系统的稳定性。
第二篇:一阶二阶自控原理实验报告
成绩
北 京 航 空 航 天 大 学
自动控制原理实验报告

学 院 自动化科学与电气工程学院
专业方向 电气工程及其自动化
班 级 120311
学 号 12031019
学生姓名 毕森森
指导教师
自动控制与测试教学实验中心
实验一 一、二阶系统的电子模拟及时域响应的动态测试
实验时间 2014.10.28 实验编号 29 同组同学 无
一、 实验目的
1. 了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。
2. 学习在电子模拟机上建立典型环节系统模型的方法。
3. 学习阶跃响应的测试方法。
二、实验内容
1. 建立一阶系统的电子模型,观测并记录在不同时间常数T时的跃响应曲线,并测定其过渡过程时间TS。
2. 建立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的跃响应曲线,并测定其超调量σ%及过渡过程时间TS。
三、实验原理
1.一阶系统: 系统传递函数为:
模拟运算电路如图1- 1所示:
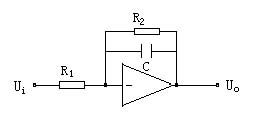
图 1- 1
由图 1-1得
在实验当中始终取R2= R1,则K=1,T= R2C,取时间常数T分别为: 0.25、 0.5、1。
2.二阶系统:
其传递函数为:
令=1弧度/秒,则系统结构如图1-2所示:

图1-2
根据结构图,建立的二阶系统模拟线路如图1-3所示:

图1-3
取R2C1=1 ,R3C2 =1,则及ζ取不同的值ζ=0.25 , ζ=0.5 , ζ=1
四、实验设备
HHMN-1电子模拟机一台、PC机一台、数字式万用表一块
五、实验步骤
1. 确定已断开电子模拟机的电源,按照实验说明书的条件和要求,根据计算的电阻电容值,搭接模拟线路;
2. 将系统输入端 与D/A1相连,将系统输出端 与A/D1相;
3. 检查线路正确后,模拟机可通电;
4. 双击桌面的“自控原理实验”图标后进入实验软件系统。
5. 在系统菜单中选择“项目”——“典型环节实验”;在弹出的对话框中阶跃信号幅值选1伏,单击按钮“硬件参数设置”,弹出“典型环节参数设置”对话框,采用默认值即可。
6. 单击“确定”,进行实验。完成后检查实验结果,填表记录实验数据,抓图记录实验曲线。
六、实验结果
1、一阶系统。
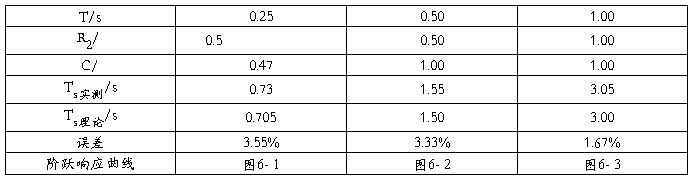
其中,,对应5%的误差带。为达到稳态值95%的测量时间。

图6- 2

图6- 3

图6- 4
2、二阶系统

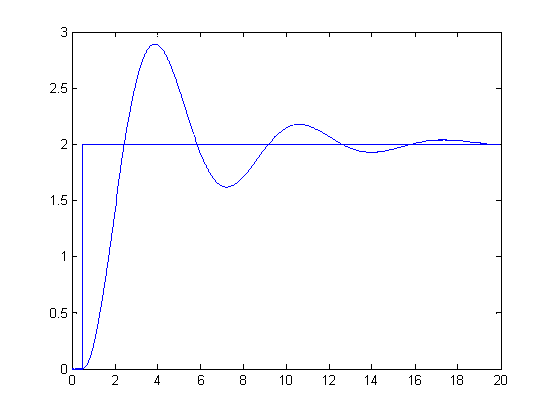
图6- 5 ξ=0.25

图6- 6 ξ=0.5

图6- 7 ξ=0.707
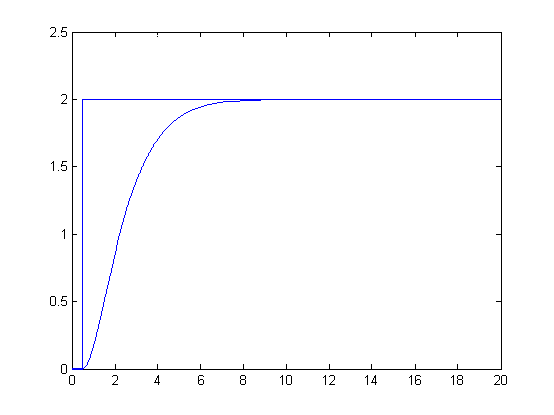
图6- 8 ξ=1
七、结果分析
1、一阶系统实验结论:
(1)、一阶系统单位阶跃响应是单调上升的曲线,其上升速度由时间常数τ唯一确定,τ越小,过渡过程的时间越短,τ越大,过渡过程时间越长。
(2)、由于,一阶系统的单位阶跃相应没有稳态误差,在图中表示为曲线最终与预期值重合。
2、二阶系统结论
(1)、平稳性:由响应曲线和超调量可以看出,阻尼比越大,超调量越小,阶跃响应的振荡倾向越弱,平稳性越好。阻尼比越小,振荡倾向越强,平稳性越差。
(2)、快速性:由阶跃响应曲线和调节时间可以看出,过大,例如,值接近于1,系统响应迟钝,调节时间长,快速性差;过小,虽然相应的起始速度较快,但因为震荡强烈,衰减缓慢,调节时间亦长,快速性也不好。由表中调节时间可以看出,当时,调节时间最小,快速性最好,为最佳阻尼比。
(3)、从图中可以看出,瞬态分量随着时间的增长减少。对于实验中的二阶欠阻尼和临界阻尼情况,单位阶跃响应稳态误差为0.
八、收获、体会及建议
通过这次自控实验,我学习了解掌握了一阶和二阶的阶跃响应,形象化了对自控原理的了解,有助于对自控原理的学习,还初步了解了MATLAB的强大的功能,激励促进我对MATLAB的进一步的学习。总之自控实验使我受益匪浅,但也有一些小差错,由于对原理没有熟悉了解和对MATLAB的陌生,实验的不甚理想,总的来说,还算顺利。
-
自控原理实验报告1
装订线12实验报告系姓名预定时间自动化系专业学号实验时间自动化班级1202班授课老师实验台号3实验名称典型环节的时域响应4装订线2…
-
自动控制原理实验报告(北化)
实验四传递函数的零极点对系统过渡过程的影响一实验目的1研究传递函数的零极点对系统过渡过程的影响2研究高阶系统的闭环主导极点的性质三…
-
PID 自控原理实验报告
自动控制理论第七次实验报告第七次实验1自动控制原理实验自动控制理论第七次实验报告一实验目的12了解数字PID控制的特点控制方式理解…
- 哈工大自动控制原理实验报告
-
自动控制原理线性系统的频域分析实验报告
实验四专业自动化班号03班指导教师陈艳飞姓名胡波实验名称线性系统的频域分析实验日期第次实验一实验目的1掌握用MATLAB语句绘制各…
-
一阶二阶自控原理实验报告
成绩北京航空航天大学自动控制原理实验报告学院自动化科学与电气工程学院专业方向班级120xx1学号120xx019学生姓名毕森森指导…
-
自动控制理论实验报告
订装实验报告系姓名预定时间实验名称典型环节的时域响应信息院侯婷婷20xx41专业学号实验时间自动化090912122720xx41…
-
自动控制原理实验报告(北化)
实验四传递函数的零极点对系统过渡过程的影响一实验目的1研究传递函数的零极点对系统过渡过程的影响2研究高阶系统的闭环主导极点的性质三…
-
自动控制原理课程设计报告
自动控制原理课程设计指导教师时国平孙佐20xx年5月1目录1课程教学目的32课程设计内容及基本要求321课程设计内容322设计基本…
-
自动控制原理-线性系统的频域分析实验报告
自动调节系统频域分析班级11081801学号1108180135姓名王佳炜日期20xx15线性系统的频域分析一实验目的1掌握用MA…
-
自动控制原理实验报告
电气工程学院自动控制原理实验报告姓名张德海学号13291119指导教师王艳实验日期20xx年12月非线性环节对系统动态过程的影响一…