自动控制原理实验报告(北化)
实验四 传递函数的零极点对系统过渡过程的影响
一、实验目的
1、研究传递函数的零极点对系统过渡过程的影响。
2、研究高阶系统的闭环主导极点的性质。
三、实验内容
考虑系统的闭环传递函数为:
求取下列情况下对象的单位阶跃响应,并进行比较( )。
)。
要求:
(1)在纸上画出上述情况下系统闭环零极点分布图。
(2)与标准二阶系统进行比较,说明增加闭环极点对系统性能的影响。
(3)当附加闭环极点与虚轴的距离发生变化时,它对系统的影响如何。
(4)当 时,对高阶系统起主导作用的闭环主导极点是哪个?为什么?
时,对高阶系统起主导作用的闭环主导极点是哪个?为什么?
1、增加闭环极点对系统性能指标的影响
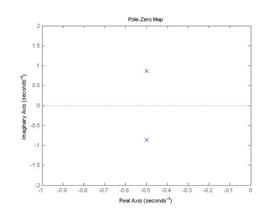
(1)T=0, 时(标准二阶系统)
时(标准二阶系统)
解答:代码如下:
wn=1;eita=0.5;
num1=wn^2;
den1=conv([t0,1],[1,2*eita*wn,wn^2]);
pzmap(num1,den1)
闭环零极点分布图如下:
(2)当时,增加附加闭环极点:① ②
② ③
③
解答:代码如下:
wn=1;eita=0.5;
t0=0;
num1=wn^2;
den1=conv([t0,1],[1,2*eita*wn,wn^2]);
pzmap(num1,den1)
hold on;
t1=1/3;
num2=wn^2;
den2=conv([t1,1],[1,2*eita*wn,wn^2]);
pzmap(num2,den2)
t2=1/0.5;
num3=wn^2;
den3=conv([t2,1],[1,2*eita*wn,wn^2]);
pzmap(num3,den3)
t3=1/0.2;
num4=wn^2;
den4=conv([t3,1],[1,2*eita*wn,wn^2]);
pzmap(num4,den4)
legend('t0','t1','t2','t3')
闭环零极点分布图如下:

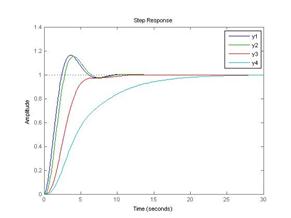
与标准二阶系统比较,增加闭环极点后,各系统的阶跃响应图如下:
wn=1;eita=0.5;
t0=0;
num1=wn^2;
den1=conv([t0,1],[1,2*eita*wn,wn^2]);
y1=tf(num1,den1);
step(y1)
hold on;
t1=1/3;
num2=wn^2;
den2=conv([t1,1],[1,2*eita*wn,wn^2]);
y2=tf(num2,den2);
step(y2)
t2=1/0.5;
num3=wn^2;
den3=conv([t2,1],[1,2*eita*wn,wn^2]);
y3=tf(num3,den3);
step(y3)
t3=1/0.2;
num4=wn^2;
den4=conv([t3,1],[1,2*eita*wn,wn^2])
y4=tf(num4,den4);
step(y4)
legend('y1','y2','y3','y4')
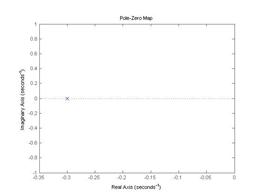
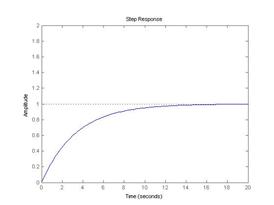
(3)一阶系统
解答:代码如下:零极点分布
t=1/0.3;
num=1;
den=[t,1];
y=tf(num,den);
pzmap(num,den)
单位阶跃响应:
t=1/0.3;
num=1;
den=[t,1];
y=tf(num,den);
step(y)
分析:由二阶系统阶跃响应图可以得到下表数据:

由实验结果可知,①当增加闭环极点 ,即表中T=1/0.2时,由于原有极点与新增极点相比,实部较小(或相等),成为主导极点,应此整个响应的曲线超调量减小(此时消失为零),单调上升,同时过渡时间变长,反应速度下降,响应接近
,即表中T=1/0.2时,由于原有极点与新增极点相比,实部较小(或相等),成为主导极点,应此整个响应的曲线超调量减小(此时消失为零),单调上升,同时过渡时间变长,反应速度下降,响应接近 的响应曲线
的响应曲线
②当增加闭环极点 ,即表中T=1/0.5时,由于原有极点与新增极点相比,实部相等,并不成为主导极点,应此整个响应的曲线超调量减小(此时消失为零),单调上升,同时过渡时间变长,反应速度下降。
,即表中T=1/0.5时,由于原有极点与新增极点相比,实部相等,并不成为主导极点,应此整个响应的曲线超调量减小(此时消失为零),单调上升,同时过渡时间变长,反应速度下降。
③当增加闭环极点 ,即表中T=1/3时,由于原有极点与新增极点相比,实部较大,为主导极点,应此整个响应的曲线几乎不变。
,即表中T=1/3时,由于原有极点与新增极点相比,实部较大,为主导极点,应此整个响应的曲线几乎不变。
④当附加极点离虚轴距离减小时,系统超调量逐渐减小至0,响应速度逐渐减慢,过渡时间逐渐增加。
⑤根据根的分布以及二阶系统的图像得,s=-0.2这个极点是主导极点。因为这个极点比起其他极点离虚轴更近,并且根据图像得,当时,传递函数没有超调量,而极点为s=-0.2时传递函数也没有超调量。故s=-0.2是主导极点。
2、增加闭环零点对系统性能指标的影响
当T=0时,增加附加闭环零点: ① ②
② ③
③
要求:
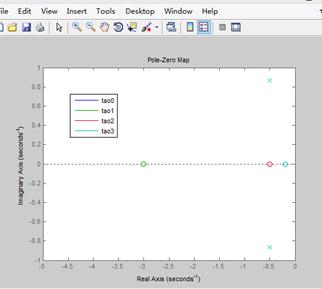
分别求取以上三种情况下系统的单位阶跃响应,并按上述对附加闭环极点的要求(1)~(3)对附加零点进行讨论。
解答:代码如下:零极点分布
wn=1;eita=0.5;
tao0=0;
num1=wn^2;
den1=[1,2*eita*wn,wn^2];
pzmap(num1,den1)
hold on;
tao1=1/3;
num2=conv([wn^2],[tao1,1]);
den2=[1,2*eita*wn,wn^2];
pzmap(num2,den2)
tao2=1/0.5;
num3=conv([wn^2],[tao2,1]);
den3=[1,2*eita*wn,wn^2];
pzmap(num3,den3)
tao3=1/0.2;
num4=conv([wn^2],[tao3,1]);
den4=[1,2*eita*wn,wn^2];
pzmap(num4,den4)
legend('tao0','tao1','tao2','tao3')
单位阶跃响应图:
wn=1;eita=0.5;
tao0=0;
num1=wn^2;
den1=[1,2*eita*wn,wn^2];
y1=tf(num1,den1);
step(y1)
hold on;
tao1=1/3;
num2=conv([wn^2],[tao1,1]);
den2=[1,2*eita*wn,wn^2];
y2=tf(num2,den2);
step(y2)
tao2=1/0.5;
num3=conv([wn^2],[tao2,1]);
den3=[1,2*eita*wn,wn^2];
y3=tf(num3,den3);
step(y3)
tao3=1/0.2;
num4=conv([wn^2],[tao3,1]);
den4=[1,2*eita*wn,wn^2];
y4=tf(num4,den4);
step(y4)
legend('tao0','tao1','tao2','tao3')
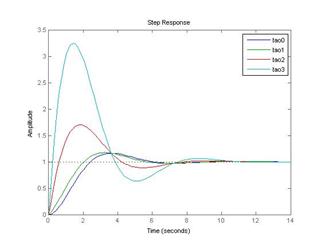
分析:由二阶系统的单位阶跃响应图可得一下数据:

由实验结果可知
①当增加闭环零点,tao>1/0.5时,整个响应的曲线超调量增大,过渡时间变长,反应速度变快
当增加闭环零点,tao=1/0.5时,整个响应的曲线超调量增大,过渡时间变长,反应速度变快
当增加闭环零点tao>1/2.5时,整个响应的曲线几乎不变
②当增加零点时,系统振荡增强,超调量增加,响应速度加快,达到稳态的时间减短。
③当附加闭环零点与虚轴的距离逐渐减小时,超调量增大、峰值时间减短、过渡时间减短、系统振荡越强烈。
实验五 PID调节规律对系统调节质量的影响
一、实验目的
1、通过选择不同的常规调节器规律及不同的调节参数,观察相应的过渡过程曲线,比较控制过程的质量指标,进一步理解和掌握调节规律和调节参数对系统控制质量的影响。
2、对给定的被控对象和给定的控制指标,找出合适的调节规律和调节参数,初步学会参数整定的方法。
3、学习Matlab中系统串联、并联和反馈的Matlab表示法。
二、预习要求
1、参阅实验指导书Matlab有关内容 。
2、教科书第三章“常规调节规律对系统控制质量的影响”的内容。
三、实验内容
为保持飞机的航向和飞行高度,人们设计了如图所示的飞机自动驾驶仪:
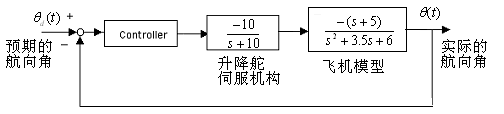
控制器可选择:
(1) P:
(2) PI: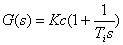
(3) PID:

对以上控制回路,调节器取以下形式时,求取输入为单位阶跃信号时,实际航向角的过渡过程曲线。记录过渡过程曲线的(a)超调量(b)峰值时间(c)过渡时间(d)衰减比(e)余差,研究不同调节规律及参数对控制质量的影响。
(1) P调节器:Kc分别取0.1,1.0,2,5,8
解答:代码如下:
num1=0.1;den1=1;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys1=feedback(y_123,y4,-1);
step(sys1);
hold on
num1=1;den1=1;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys2=feedback(y_123,y4,-1);
step(sys2);
num1=2;den1=1;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys3=feedback(y_123,y4,-1);
step(sys3);
num1=5;den1=1;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys4=feedback(y_123,y4,-1);
step(sys4);
num1=8;den1=1;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys5=feedback(y_123,y4,-1);
step(sys5);
legend('sys1','sys2','sys3','sys4','sys5')
单位阶跃图如下:
分析:由单位阶跃响应图可得如下数据:

由图像和表格可知,随着kc的增大,系统的幅值增大,响应速度加快,超调量增大,衰减比从无到有,到达稳态的时间逐渐减短。
(2) PI调节器:Kc=5,Ti分别取1,2,4,6,与相同条件下的纯比例调节器比较。
解答:代码如下:
hold on
num1=[10,5];den1=2;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=seri num1=[5,5];den1=1;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys1=feedback(y_123,y4,-1);
step(sys1);
es(y1,y2);
y_123=series(y_12,y3);
sys2=feedback(y_123,y4,-1);
step(sys2);
num1=[20,5];den1=4;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys3=feedback(y_123,y4,-1);
step(sys3);
num1=[30,5];den1=6;y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys4=feedback(y_123,y4,-1);
step(sys4);
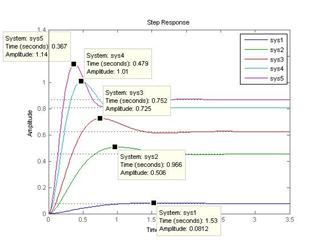
legend('sys1','sys2','sys3','sys4')

分析:由上表可知,增加了积分环节后,超调量减小,系统稳定性提高,反应速度变慢,Ti越小,积分作用越明显。
(3) PID调节器:Kc=5, Ti=1, Td分别取0.001,0.01,0.05,0.1,与相同条件下的PI调节器比较。
解答:代码如下:
num1=[0.005,5,5];den1=[1,0];y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys1=feedback(y_123,y4,-1);
step(sys1);
hold on
num1=[0.05,5,5];den1=[1,0];y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys2=feedback(y_123,y4,-1);
step(sys2);
num1=[0.25,5,5];den1=[1,0];y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys3=feedback(y_123,y4,-1);
step(sys3);
num1=[0.5,5,5];den1=[1,0];y1=tf(num1,den1);
num2=-10;den2=[1,10];y2=tf(num2,den2);
num3=[-1,-5];den3=[1,3.5,6];y3=tf(num3,den3);
num4=1;den4=1;y4=tf(num4,den4);
y_12=series(y1,y2);
y_123=series(y_12,y3);
sys4=feedback(y_123,y4,-1);
step(sys4);
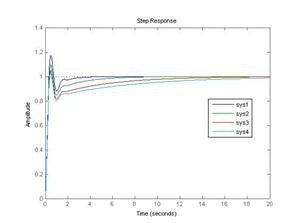
legend('sys1','sys2','sys3','sys4')

分析:由上表和PI规律的表格对比可知:系统增加微分环节后,系统的调节时间减小,反应速度加快,并且Td越大,微分作用越明显
四、选择内容
1、针对上述实验内容,采用Simulink完成飞机模型的PID控制结构连接,并据此进行仿真实验。在单位阶跃信号输入下,要求余差=0,衰减比=6~10,过渡时间<10,最大偏差<0.3,峰值时间<5,请选择调节器的调节规律和调节参数。
2、若输入为斜坡信号 ,取比例控制器Kc=2,绘制飞机航向角的斜坡响应,并求出10s后的航向角误差;为减小稳态误差,可尝试采用PI和PID控制器,比较三种不同类型控制器下的稳态误差。
,取比例控制器Kc=2,绘制飞机航向角的斜坡响应,并求出10s后的航向角误差;为减小稳态误差,可尝试采用PI和PID控制器,比较三种不同类型控制器下的稳态误差。
五、实验报告
1、整理各种调节规律及调节参数下的过渡过程曲线的质量指标。
2、根据实验结果,回答以下问题:
(1)比例、积分、微分三种调节规律在调节过程中各起什么作用?各有什么优缺点?
解答:比例环节:将改变系统的峰值时间、幅度值和稳态值。优点是,比例作用大,可以加快调节,减小误差。缺点是,过大的比例常数会使系统的稳定性下降,甚至造成系统的不稳定。
积分作用:消除系统稳态误差,改变系统的过渡时间。Ti越小,积分作用越强,稳态误差越小、超调量越大、过渡时间越短。缺点是,会使系统稳定性下降。
微分作用:微分环节反映系统偏差信号的变化率,减小超调量和过渡时间,改善系统动态性能。缺点是对噪声有放大作用,不利于系统抗干扰。
(2)说明 变化对各项质量指标的影响关系。
变化对各项质量指标的影响关系。
解答:Kc增加,超调量增加,峰值时间和过渡时间减小。反之,Kc减小,超调量减小,峰值时间和过渡时间增大。
Ti增加,积分作用减小,超调量减小,过渡时间变长。反之,Ti减小,积分作用增强,超调量增大,过渡时间缩短。
Td增大,超调量减小。反之,超调量增加。
-
自动控制原理实验报告(1专业)五个实验
自动控制原理实验专业班级姓名学号实验时间:20xx.1020xx.11一、实验目的和要求:通过自动控制原理实验牢固地掌握《自动控制…
-
自动控制原理实验报告(三)
东南大学实验报告课程名称:自动控制实验实验名称:闭环电压控制系统的研究院(系):仪科专业:姓名:**学号:**实验室:实验组别:同…
-
自动控制原理实验报告
电气工程学院自动控制原理实验报告姓名张德海学号13291119指导教师王艳实验日期20xx年12月非线性环节对系统动态过程的影响一…
-
自动控制原理实验报告1--典型环节的模拟研究
南昌大学实验报告学生姓名黄佐财学号6100308118专业班级电力系统082班实验类型验证综合设计创新实验日期实验成绩一实验项目名…
-
PID_自控原理实验报告
1自动控制原理实验一实验目的12了解数字PID控制的特点控制方式理解和掌握连续控制系统的PID控制算法表达式3了解和掌握用试验箱进…
-
《自动控制原理》课程学习心得
摘要:本文根据自动控制原理的课程特点,结合自动控制原理课程的教学现状,在总结经验和教训的基础上,遵循理论联系实践的原则,结合mat…
-
《自动控制原理》课程学习心得体会
《自动控制原理》课程学习心得体会***(***)20xx级电子科学与技术我是一名电子科学类的学生,专业的培养目标就是要求我们能在电…
- 哈工大自动控制原理实验报告
-
自动控制原理实验报告
信控学院上机实验实验报告课程自动控制原理实验日期年月日专业班级测控1201班姓名XXXX学号XXXXX同组人实验名称系统的能控性与…
-
自动控制原理-线性系统的频域分析实验报告
自动调节系统频域分析班级11081801学号1108180135姓名王佳炜日期20xx15线性系统的频域分析一实验目的1掌握用MA…
-
一阶二阶自控原理实验报告
成绩北京航空航天大学自动控制原理实验报告学院自动化科学与电气工程学院专业方向班级120xx1学号120xx019学生姓名毕森森指导…