自动控制原理实验报告
实 验 报 告
课程 自动控制原理 实验日期 年 月 日
专业班级 测控1201班 姓名 XXXX 学号 XXXXX同组人
实验名称系统的能控性与能观测性分析及状态反馈极点配置
批阅教师签字
一、实验目的
1、学习掌握MATLAB控制工具箱中的基本命令的操作方法;
2、加深理解能观测性、能控性等观念;
3、掌握状态反馈系统的极点配置方法,研究不同配置对系统 动态特性的影响。
二、实验内容
1、学习掌握MATLAB控制工具箱中的基本命令的操作方法,特别是数学模型的描述。(自选控制对象模型,应用以下命令,并写出结果)
1) step, damp, pzmap, rlocus, rlocfind, bode, margin, nyquist;
2) tf2ss, ss2tf, tf2zp, zp2ss;
3) ss2ss, jordan, canon, eig。
2、能控性、能观测性分析
(a)了解以下命令的功能;自选对象模型,进行运算,并写出结果。
gram, ctrb, obsv, ctrbf, obsvf
(b)已知连续系统的传递函数模型, ,当a 分别取-1,0,1时,判别系统的能控性与能观测性;
,当a 分别取-1,0,1时,判别系统的能控性与能观测性;
(c)已知系统矩阵为 ,
, ,
, ,判别系统的能控性与能观测性;
,判别系统的能控性与能观测性;
3、状态反馈极点配置
原系统如图3-2所示。图中,X1和X2是可以测量的状态变量。

图3-2 系统结构图
试设计状态反馈矩阵 ,使系统加入状态反馈后其动态性能指标满足给定的要求:
,使系统加入状态反馈后其动态性能指标满足给定的要求:
(1) 已知:K=10,T=1秒,要求加入状态反馈后系统的动态性能指标为:
σ%≤20%,ts≤1秒。
(12) 已知:K=1,T=0.05秒,要求加入状态反馈后系统的动态性能指标为:
σ%≤5%,ts≤0.5秒。
状态反馈后的系统,如图3-3所示:

图3-3 状态反馈后系统结构图
分别观测状态反馈前后两个系统的阶跃响应曲线,并检验系统的动态性能指标是否满足设计要求
三、实验环境
MATLAB2014
四、实验原理(或程序框图)及步骤
1、系统能控性、能观性分析
设系统的状态空间表达式如下:

能控性直接判据:系统能控的充分必要条件是
间接判别法:通过线性非奇异变换之后,根据 中是否有全零行判断
中是否有全零行判断
状态能观测性判别式为:

2、状态反馈极点配置
一个受控系统只要其状态是完全能控的,则闭环系统的极点可以任意配置。极点配置有两种方法:①采用变换矩阵T,将状态方程转换成可控标准型,然后将期望的特征方程和加入状态反馈增益矩阵K后的特征方程比较,令对应项的系数相等,从而决定状态反馈增益矩阵K;②基于Carlay-Hamilton理论,它指出矩阵状态矩阵A满足自身的特征方程,改变矩阵特征多项式 的值,可以推出增益矩阵K,这种方法推出增益矩阵K的方程式叫Ackermann公式。
的值,可以推出增益矩阵K,这种方法推出增益矩阵K的方程式叫Ackermann公式。
五、程序源代码
1、熟悉指令
文件:Step
num=[0,0,0,2000];
den=[1,205,1000,20000];
t=0:0.05:2.5;
sys=tf(num,den);
step(sys,t);
grid;

文件:Damp
num=[1];
den=[1,10,10];
sys=tf(num,den);
[w zeta]=damp(sys)
%输出结果
w=
1.1270
8.8730
zeta =
1
1
文件:Pzmap
H = tf([2 5 1],[1 2 3]);
pzmap(H)

文件:Rlocus
clear
num=[0 0 0 1];
den=conv([1 0],[1 3+sqrt(-1)]);
den=conv(den,[1 3-sqrt(-1)]);
rlocus(num,den);
v=[-8 2 -4 4];
axis(v);

文件:Rlocfind
rlocfind(sys)
Select a point in the graphics window
selected_point =
-3.7239 + 0.0062i
ans =
5.4641
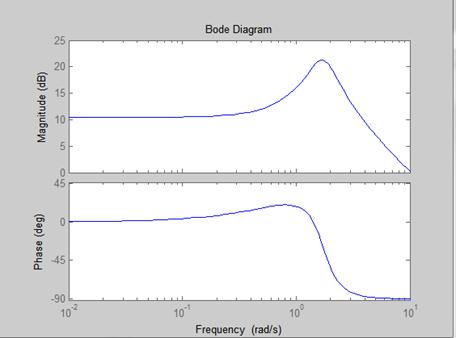
文件:Bode
num=[1000,1000];
den=[10,10,50];
bode(num,den)
文件:Nyquist
clear
num=[0 20 20 10];
den=conv([1 1 0],[1 10]);
nyquist(num,den)

tf2ss, ss2tf, tf2zp, zp2ss ;
文件:Zp2ss
clear
Z=[-1;-3];
P=[0;-2;-4;-6];
K=4;
[A,B,C,D]=zp2ss(Z,P,K)
A =
-10.0000 -4.8990 0 0
4.8990 0 0 0
-6.0000 -4.2866 -2.0000 0
0 0 1.0000 0
B =[1 0 1 0]T
C =
0 0 0 4
D=0
文件:Ss2tf
clear
A=[0 1;1 -2];B=[0;1];C=[1 3];D=[1];
[num,den]=ss2tf(A,B,C,D)
printsys(num,den,'s')
[z,p,k]=ss2zp(A,B,C,D)
num =
1 5 0
den =
1.0000 2.0000 -1.0000
num/den =
s^2 + 5 s
-------------
s^2 + 2 s - 1
z =
0
-5
p =
-2.4142
0.4142
k =
1
文件:Tf2ss
[A1,B1,C1,D1]=tf2ss(num,den)
A1 =
-12.0000 -47.0000 -60.0000 0
1.0000 0 0 0
0 1.0000 0 0
0 0 1.0000 0
B1 =
1
0
0
0
C1 =
0.0000 8.0000 24.0000 16.0000
D1 =
0
文件:Tf2zp
[z1,p1,k1]=tf2zp(num,den)
z1 = 1.0e+015 *
-1.1259
-0.0000
-0.0000
p1 =
0
-5.0000
-4.0000
-3.0000
7
k1 =
7.1054e-015
ss2ss, jordan, canon, eig
文件:eig
A=[0 1 0;0 0 1;2 -5 4];
D=Eig(A)
D =
1.0000 + 0.0000i
1.0000 - 0.0000i
2.0000
文件:Jordan
J=jordan(A)
J =
2 0 0
0 1 1
0 0 1
2、能控性、能观测性分析
(a)了解以下命令;自选对象模型,进行运算,并写出结果
gram, ctrb, obsv, ctrbf, obsvf
(b)gram:计算状态空间的可控性矩阵Gramian矩阵(SS)模型SYS。
(c)Wc = gram(sys,'c')
(d)Wc = gram(sys,'o')
文件:ctrb_obsv
w=0.0011;
A=[0 1 0 0;3*w^2 0 0 2*w; 0 0 0 1;0 -2*w 0 0];
b1=[0;1;0;0];
Pc=ctrb(A,b1);
Po=obsv(A,b1')
文件:Ctrbf
A=[1 1;4 -2];
B=[1 -1;1 -1];
C=[1 0;0 1];
[Abar,Bbar,Cbar,T,k] = ctrbf(A,B,C)
Abar =
-3.0000 0.0000
3.0000 2.0000
Bbar =
0 0
-1.4142 1.4142
Cbar =
-0.7071 -0.7071
0.7071 -0.7071
T =
-0.7071 0.7071
-0.7071 -0.7071
k =
1 0
文件:obsvf
A=[1 1;4 -2];
B=[1 -1;1 -1];
C=[1 0;0 1];
[Abar,Bbar,Cbar,T,k] = obsvf(A,B,C)
Abar =
1 1
4 -2
Bbar =
1 -1
1 -1
Cbar =
1 0
0 1
T =
1 0
0 1
k =
2 0
(b)
[A B C D]=tf2ss(num,den)
Qc=ctrb(A,B) %生成能控性判别矩阵
rank(Qc) %求矩阵Qc的秩
%ans = 3 %满秩,故系统能控
Qo=obsv(A,C) %生成能观测性判别矩阵
rank(Qo) %求矩阵Qo的秩
%结论:
%求得 A=[-10,-27,-18;1,0,0;0,1,0]
% B=[1;0;0] C=[0 1 1] D=0
% a=-1 能控能观
% a=0 能控能观
% a=1 rank(Qc)=3,rank(Qo)=2
(c)
a=[6.666 -10.6667 -0.3333;1 0 1;0 1 2];
b=[0 1 1]';
c=[1 0 2]
Qc=ctrb(a,b) %生成能控性判别矩阵
rank(Qc) %求矩阵Qc的秩
Qo=obsv(a,c) %生成能观测性判别矩阵
rank(Qo) %求矩阵Qo的秩
%求得Qc和Qo的秩均为满秩3,所以系统能控能观测
(c)
文件:3_1
clear
A=[0 1;-10 -1];
B=[0;10];C=[1 0];D=[0];
disp('原系统的极点为');p=eig(A)'
P=[-3.54+sqrt(-3.54^2);-3.54-sqrt(-3.54^2)];
K=place(A,B,P)
disp('配置后系统的极点为')
p=eig(A-B*K)'
disp('极点配置后的闭环系统为')
sysnew=ss(A-B*K,B,C,D)
step(sysnew/dcgain(sysnew))
原系统的极点为
p =
-0.5000 - 3.1225i -0.5000 + 3.1225i
K =
1.5063 0.6080
配置后系统的极点为
p =
-3.5400 - 3.5400i -3.5400 + 3.5400i
极点配置后的闭环系统为
sysnew =
a =
x1 x2
x1 0 1
x2 -25.06 -7.08
b =
u1
x1 0
x2 10
c =
x1 x2
y1 1 0
d =
u1
y1 0
Continuous-time state-space model.

极点配置后系统的阶跃响应
文件:3_2
clear
A=[0 1;-10 -1];
B=[0;10];C=[1 0];D=[0];
disp('原系统的极点为');p=eig(A)'
P=[-7.07+sqrt(-7.07^2);-7.07-sqrt(-7.07^2)];
K=place(A,B,P)
disp('配置后系统的极点为')
p=eig(A-B*K)'
disp('极点配置后的闭环系统为')
sysnew=ss(A-B*K,B,C,D)
step(sysnew/dcgain(sysnew))
原系统的极点为
p =
-0.5000 - 3.1225i -0.5000 + 3.1225i
K =
8.9970 1.3140
配置后系统的极点为
p =
-7.0700 - 7.0700i -7.0700 + 7.0700i
极点配置后的闭环系统为
sysnew =
a =
x1 x2
x1 0 1
x2 -99.97 -14.14
b =
u1
x1 0
x2 10
c =
x1 x2
y1 1 0
d =
u1
y1 0
Continuous-time state-space model.

极点配置后系统的阶跃响应
第二篇:计算机组成原理实验报告 进位位控制、通用寄存器判零实验
西华大学数学与计算机学院实验报告


一、目的
1.熟悉带进位位控制的算术逻辑运算器的组成和硬件电路
2.用进位寄存器来实现带进位的左移、右移
3.熟悉判零线路
二、实验原理
(1)进位和判零电路的实验构成
进位和判零电路由1片GAL、74LS74和两个LED(CY、ZD)发光管组成。当有进位时CY发光管亮,ZD发光管亮表示当前通用寄存器的内容为0。
(2)进位控制的原理
1.进位电路与通用寄存器、ALU有着非常紧密的关系,算术逻辑单元的进位输出和通用寄存器带进位移动都会影响进位寄存器的结果。
2.若实验者在做算术逻辑实验时,选择了算术运算方式,当ALU的计算结果输出至总线时,在CCK上来一个上升沿,将把74LS181的进位输出位(CN+4)上的值(为了统一进位标识,1表示有进位,0表示无进位),打入进位寄存器(74LS74)中,并且有进位时CY(LED)发光。
3.在进行通用寄存器的数据移位实验时,把CCK和通用寄存器的工作脉冲接在一起,当选择带进位左移时,在工作脉冲下,通用寄存器的最高位将移入进位寄存器中,进位寄存器中的值将移入通用寄存器的最低位。当进位寄存器中的值为1时,CY(LED)发光,若进位寄存器中的值为0时,CY(LED)灭。同样在带进位右移时,也会产生这样的结果。
4.通过把通用寄存器中的每一位做“或”运算,当寄存器的每一位为0时,ZD输出0,ZD(LED)发光
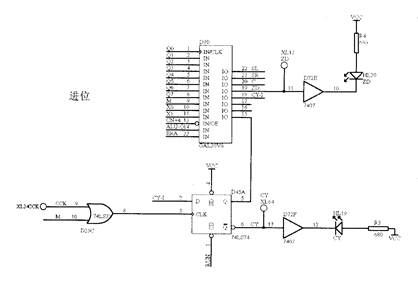
图1 进位控制原理图
三、使用环境
计算机组成原理实验箱
四、实验步骤
(一)算术逻辑运算单元带进位位的加法运算实验
1.把RA-IN(8芯的盒型插座)与CPT-B板上二进制开关单元中的J1插座相连(对应二进制开关H16~H23),把RA-OUT(8芯的盒型插座)与数据总线上的DJ2相连。
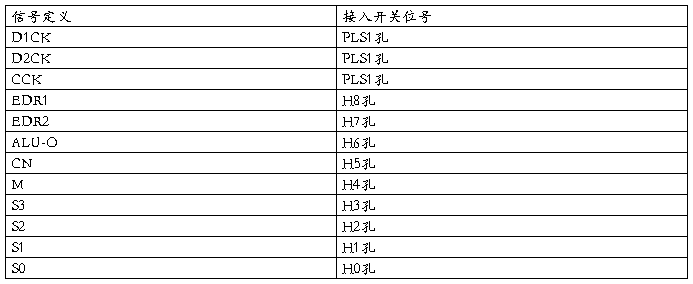
2.把D1CK、D2CK、CCK用连线连到脉冲单元的PLS1上,把EDR1、EDR2、ALU-O、S0、S1、S2、S3、CN、M接入二进制拨动开关(请按下表接线)。
3.按启停单元中的停止按钮,实验机停机并且把进位寄存器CY清零(CY灯灭),在本实验中使用算术逻辑单元作为进位发生器,按运行键,实验即进入运行状态。
4.二进制开关H16~H23作为数据输入,置65H(对应开关如下表)

置各控制信号如下:

5.按脉冲单元中的PLS1脉冲按键,在D1CK上产生一个上升沿,把65H打入DR1数据锁存器。通过逻辑笔来测量确定DR1寄存器(74LS374)的输出端,检验数据是否进入DR1中。
6.二进制开关H16~H23作为数据输入,置A7H(对应开关如下表)

置各控制信号如下:

7.按脉冲单元中的PLS1脉冲按键,在D2CK上产生一个上升沿,把A7H打入DR2数据锁存器。通过逻辑笔来测量确定DR2寄存器(74LS374)的输出端,检验数据是否进入DR2中。
8.再置各控制信号如下:

9.按脉冲单元中的PLS1脉冲按键,在CCK上产生一个上升沿,把74LS181的进位打入进位寄存器中,在有进位的情况下,CY指示灯亮,并且ALU-O为0,把计算结果输出到数据总线。
$ 经过74LS181的计算将产生进位,即CN+4输出0,当把计算结果输出到总线时,数据总线上的LED指示灯IDB0~IDB7显示结果为0CH。
(二)带进位移位
1.按启停单元中的停止按钮,实验机停机并且把进位寄存器CY清零(CY灯灭),在本实验中使用通用寄存器作为进位发生器,按运行键,实验即进入运行状态。
2.把RA-IN(8芯的盒型插座)与CPT-B板上二进制开关单元中的J1插座相连(对应二进制开关H16~H23),把RA-OUT(8芯的盒型插座)与数据总线上的DJ6相连。
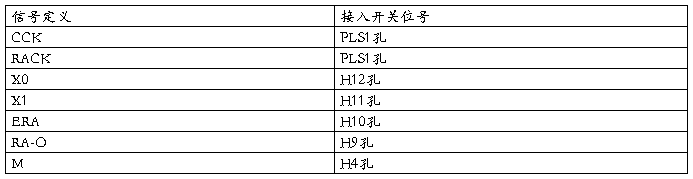
3.把CCK、RACK连到脉冲单元的PLS1,把ERA、X0、X1、RA-0、M接入二进制拨动开关。请按下表接线。
4.二进制开关H16~H23作为数据输入,置81H(对应开关如下表)

置各控制信号如下:

5.按脉冲单元中的PLS1脉冲按键,在RACK上产生一个上升沿,把81H打入通用寄存器。
6.此时数据总线上的LED指示灯IDB0~IDB7显示为81H。由于通用寄存器内容不为0,所以ZD(LED)灯灭。
置各控制信号如下:

7.按脉冲单元中的PLS1脉冲按键,在RACK上产生一个上升沿,使通用寄存器中的值左移。因进位寄存器CY的初始值为0,在RACK脉冲作用下将CY打入通用寄存器的最低位Q0。同时在RACK脉冲作用下把通用寄存器的最高位Q7(为1)打入进位寄存器CY,使CY灯亮,这样就实现了带进位的左移功能。
8.同样置各控制信号如下,并且按脉冲单元中的PLS1脉冲按键,可实现带进位的右移功能。

五、总结
通过这次实验,我了解了通用寄存器的判零电路,实现了用进位寄存器来实现带进位的左移、右移,熟悉了带进位位控制算术逻辑运算器的组成和硬件电路。实验过程中遇到了一些问题,在老师和同学的帮助下得到了解决,成功的完成了本次实验。
-
自动控制原理实验报告(1专业)五个实验
自动控制原理实验专业班级姓名学号实验时间:20xx.1020xx.11一、实验目的和要求:通过自动控制原理实验牢固地掌握《自动控制…
-
自动控制原理实验报告(三)
东南大学实验报告课程名称:自动控制实验实验名称:闭环电压控制系统的研究院(系):仪科专业:姓名:**学号:**实验室:实验组别:同…
-
自动控制原理实验报告
电气工程学院自动控制原理实验报告姓名张德海学号13291119指导教师王艳实验日期20xx年12月非线性环节对系统动态过程的影响一…
-
自动控制原理实验报告1--典型环节的模拟研究
南昌大学实验报告学生姓名黄佐财学号6100308118专业班级电力系统082班实验类型验证综合设计创新实验日期实验成绩一实验项目名…
-
PID_自控原理实验报告
1自动控制原理实验一实验目的12了解数字PID控制的特点控制方式理解和掌握连续控制系统的PID控制算法表达式3了解和掌握用试验箱进…
-
《自动控制原理》课程学习心得
摘要:本文根据自动控制原理的课程特点,结合自动控制原理课程的教学现状,在总结经验和教训的基础上,遵循理论联系实践的原则,结合mat…
-
《自动控制原理》课程学习心得体会
《自动控制原理》课程学习心得体会***(***)20xx级电子科学与技术我是一名电子科学类的学生,专业的培养目标就是要求我们能在电…
- 哈工大自动控制原理实验报告
-
自动控制原理实验报告(北化)
实验四传递函数的零极点对系统过渡过程的影响一实验目的1研究传递函数的零极点对系统过渡过程的影响2研究高阶系统的闭环主导极点的性质三…
-
自动控制原理-线性系统的频域分析实验报告
自动调节系统频域分析班级11081801学号1108180135姓名王佳炜日期20xx15线性系统的频域分析一实验目的1掌握用MA…
-
一阶二阶自控原理实验报告
成绩北京航空航天大学自动控制原理实验报告学院自动化科学与电气工程学院专业方向班级120xx1学号120xx019学生姓名毕森森指导…