电子仿真技术实验指导书
实验一 典型电信号的观察与测量
一、实验目的
1、初步掌握用示波器观察电信号波形,定量测出正弦信号和脉冲信号的波形参数。
2、初步掌握示波器、信号发生器、数字万用表的使用。
3、掌握Multisim仿真测试与实物测试的异同点。
二、实验原理说明
1、正弦交流信号和方波脉冲信号是常用的电激励信号,可由函数信号发生器提供。正弦信号的波形参数是幅值Um、周期T(或频率f)和初相;脉冲信号的波形参数是幅值Um、周期T及脉宽tk。
2、电子示波器是一种信号图形观测仪器,可测出电信号的波形参数。从荧光屏的Y轴刻度尺并结合其量程分档选择开关(Y轴输入电压灵敏度V/div分档选择开关)读得电信号的幅值;从荧光屏的X 轴刻度尺并结合其量程分档(时间扫描速度t /div分档)选择开关,读得电信号的周期、脉宽、相位差等参数。为了完成对各种不同波形、不同要求的观察和测量,它还有一些其它的调节和控制按钮,希望在实验中加以摸索和掌握。
一台双踪示波器可以同时观察和测量两个信号的波形和参数。
三、实验设备

四、实验内容
1、正弦波信号的观测
(1) 将示波器的幅度和扫描速度微调旋钮旋至“校准”位置。
(2) 在multisim 9 中,将信号发生器的正弦波输出口与示波器的YA插座相连。
(3) 在信号发生器中选择正弦波输出,点击仿真按钮。
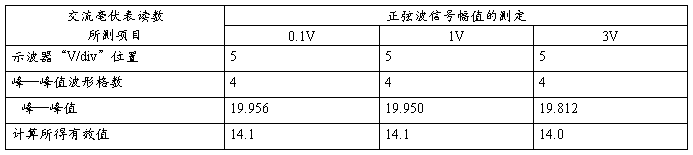
通过参数设置,使输出频率分别为50Hz,1.5KHz和20KHz;再使输出幅值分别为有效值0.1V,1V, 3V(由交流毫伏表读得)。调节示波器Y轴和X轴的偏转灵敏度至合适的位置,从荧光屏上读得幅值及周期,分别记入表1-1、1-2中。
表1-1正弦波信号频率的测定1
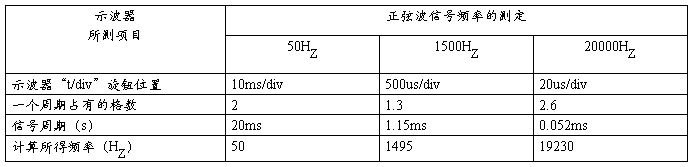
表1-2正弦波信号频率的测定2
2、方波脉冲信号的观察和测定
(1) 在multisim 9 中,将信号发生器的正弦波输出口与示波器的YA插座相连,选择方波信号输出。
(2) 调节方波的输出幅度为3. 0VP-P(用示波器测定),分别观测100Hz,3KHz和30KHz方波信号的波形参数。
(3) 使信号频率保持在3KHz,选择不同的幅度及脉宽,观测波形参数的变化。
(4) 自拟数据表格。
五、仿真实验
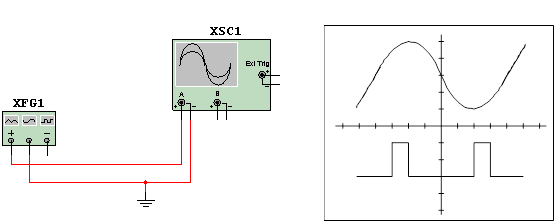
(1) 在Multisim 9平台上建立图1.1所示电路,分别双击信号发生器、示波器图标,显示出信号发生器、示波器虚拟面板图。
(2) 调节信号发生器参数,使信号发生器的输出信号符合实验要求。
(3) 单击示波器仿真面板图上的Expand按钮,示波器显示屏扩展,按住鼠标左键将垂
直光标拖到需要读取数据的位置,在显示屏的下方显示光标与波形垂直相交点处的时间和电压,以及两光标之间的时间和电压。
(4) 用示波器测出给定参数的周期及幅值。
(5) 按照实验内容,完成仿真。
六、实验注意事项
1、 调节示波器时,要注意触发开关和电平调节旋钮的配合使用,以使显示的波形稳定。
2、 为防止外界干扰, 信号发生器的接地端与示波器的接地端要相连(称共地)。
3、 虚拟的示波器,各旋钮、功能的标注同实物示波器有所差别,实验前请详细阅读教材中虚拟示波器的使用方法。
七、预习思考题
1、 示波器面板上“t/div” 和“V/div”的含义是什么?
2、 应用双踪示波器观察到如图1.2所示的两个波形,YA和YB 轴的“V/div”的指示均为0.5V,“t/div” 指示为20μS, 试写出这两个波形信号的波形参数。
八、实验报告
1. 整理实验中显示的各种波形,绘制有代表性的波形。
2. 总结实验中所用仪器的使用方法及观测电信号的方法。
 3. 心得体会及其它。
3. 心得体会及其它。
图1.1 仿真电路 图 1.2 示波器上观察到的两个波形
第二篇:计算机仿真技术实验指导书
《计算机仿真技术》实验指导书
实验一 状态空间模型的仿真
一、实验目的
通过实验,学习4阶龙格-库塔法的基本思路和计算公式,加深理解4阶龙格-库塔法的原理和稳定域。加深理解仿真的稳定性,仿真步长对仿真精度的影响。
二、实验内容
1、线性定常系统
 ;
;
2、非线性系统
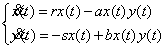
其中:r=0.001, a=2´10-6, s=0.01, b=1´10-6, x(0)=12000, y(0)=600。
三、实验原理
运用SIMULINK仿真工具进行实验。
四、实验设备和仪器
微型计算机、MATLAB软件。
五、实验方法
运行MATLAB,在MATLAB窗口中按SimuLink按钮,启动SimuLink库浏览器,在浏览器窗口上选create a new modem命令,得到一个空模型,从Library: SimuLink窗口中找到需要的模块,将这些模块拖到空模型窗口中。将空模型窗口中的排好,并按要求连接。在保存好的模型窗口中,选Simulation\Paramters命令设置各模块的参数和仿真参数。给模型取一个名字,保存起来。选Simulation\Start命令,进行仿真。
六、实验报告
1、所采用方法的基本思路和计算公式。
2、仿真步骤及说明。
3、仿真过程及仿真结果分析
要点:
(1)学习4阶龙格-库塔法的基本思路和计算公式;
(2)为了保证仿真的稳定,分析线性定常系统,其最大仿真步长为多少?
4、实验的心得体会。
实验二 小功率随动系统的仿真
一、实验目的
掌握时域离散相似法仿真模型在SIMULINK中的实现方法,学习含有非线性环节的控制系统的仿真方法,加深理解离散相似法的原理及特点。计算线性系统开环切割频率及过度过程时间的估计值(5%),并按离散相似法选择仿真步长的原则预先选择仿真步长。考虑回环特性时,计算系统的自激振荡频率和振荡的幅值。
二、实验内容

1、线性系统
已知一个小功率随动系统,其结构如下图
其中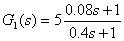 ,
,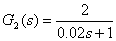 ,
,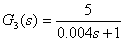 ,
, ,仿真R(t)=10´1(t)作用下,输出Y(t)的跟踪过程。
,仿真R(t)=10´1(t)作用下,输出Y(t)的跟踪过程。
2、非线性系统
考虑在上述线性系统中第4个环节后有一个回环非线性环节,仿真R(t)=10´1(t)作用下,输出Y(t)的跟踪过程。
回环特性又称为环(间隙)特性。该特性如图1(a)所示。其数学表达式为

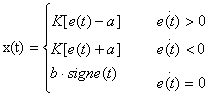
式中, 为间隙宽度,K为输出特性的斜率,b为常数。
为间隙宽度,K为输出特性的斜率,b为常数。
当输入e(t)增大并超过之后,输出x(t)与输入e(t)成比例,随着输入量的增大输出量沿特性①上升。当输入增大到某值后开始减小时,输出量则保持不变,直至输入量减小了2之后,输出量方沿特性②下降。
机械传动中的齿轮间隙是典型的回环特性。图1(b)表示具有这种特性的传动装置。回环特性的存在,会使系统稳态误差增大,相位滞后增大,系统暂态特性变坏,甚至使系统不稳定或产生自振荡,因此应消除或减弱它的影响。

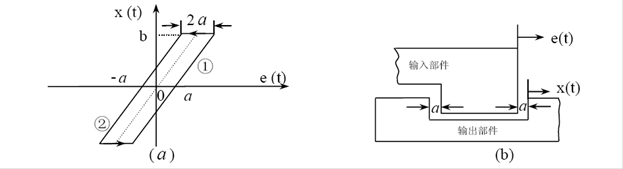
图1 回环特性
三、实验原理
运用SIMULINK仿真工具进行实验。
四、实验设备和仪器
微型计算机、MATLAB软件。
五、实验方法
运行MATLAB,在MATLAB窗口中按SimuLink按钮,启动SimuLink库浏览器,在浏览器窗口上选create a new modem命令,得到一个空模型,从Library: SimuLink窗口中找到需要的模块,将这些模块拖到空模型窗口中。将空模型窗口中的排好,并按要求连接。在保存好的模型窗口中,选Simulation\Paramters命令设置各模块的参数和仿真参数。给模型取一个名字,保存起来。选Simulation\Start命令,进行仿真。
六、实验报告
1、所采用方法的基本思路和计算公式。
2、仿真步骤及说明。
3、仿真过程及仿真结果分析
要点:
(1)计算线性系统开环切割频率及过度过程时间的估计值(5%);
(2)并按离散相似法选择仿真步长的原则预先选择仿真步长;
(3)考虑回环特性时,计算系统的自激振荡频率和振荡的幅值。
4、实验的心得体会。
实验三 PID 控制器的设计与仿真
一、实验目的
掌握控制系统PID校正的一般方法,进一步体会各种校正对系统性能的影响,加深对PID控制器中各参数对系统性能影响的理解。
二、实验内容
一个角度跟踪系统如图所示
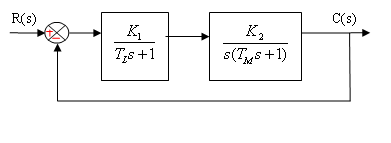
其中可调放大系数K1=1,K2=800,滤波器时间常数TL=0.2224秒,伺服电机电机拖动系统时间常数TM=0.2秒。对该系统的校正前,后的动态特性进行仿真。
基本要求
设计一个PID调节器进行串联校正。要求校正后的系统满足指标:
(1)幅值稳定裕度 G>18dB
(2)相角稳定裕度 g>50º
(3)系统的跟踪误差Es<0.002。
三、实验原理
运用SIMULINK仿真工具进行实验。
四、实验设备和仪器
微型计算机、MATLAB软件。
五、实验方法
运行MATLAB,在MATLAB窗口中按SimuLink按钮,启动SimuLink库浏览器,在浏览器窗口上选create a new modem命令,得到一个空模型,从Library: SimuLink窗口中找到需要的模块,将这些模块拖到空模型窗口中。将空模型窗口中的排好,并按要求连接。在保存好的模型窗口中,选Simulation\Paramters命令设置各模块的参数和仿真参数。给模型取一个名字,保存起来。选Simulation\Start命令,进行仿真。
六、实验报告
1、所采用方法的基本思路和计算公式。
2、仿真步骤及说明。
3、仿真过程及仿真结果分析
要点:
(1)学习PID控制器的理论方法;
(2)画出校正前、后系统的Bode图,校正前、后系统的相角裕度,分析系统的稳定性。
4、实验的心得体会。
实验四 最小拍控制器的仿真
一、实验目的
掌握零阶保持器的原理,进一步体会采样周期与仿真步长之间的关系,加深对系统的连续部分和离散部分在仿真中处理方法的理解。
二、实验内容
已知一个系统如下图所示

其中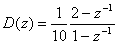 为离散控制器,Gh(s)是零阶保持器,G(s)=10/s,试分别作出这个系统在输入为r(t)=1(t)、2t下的响应曲线,取采样周期T=0.5。
为离散控制器,Gh(s)是零阶保持器,G(s)=10/s,试分别作出这个系统在输入为r(t)=1(t)、2t下的响应曲线,取采样周期T=0.5。
三、实验原理
运用SIMULINK仿真工具进行实验。
四、 实验设备和仪器
微型计算机、MATLAB软件。
五、实验方法
运行MATLAB,在MATLAB窗口中按SimuLink按钮,启动SimuLink库浏览器,在浏览器窗口上选create a new modem命令,得到一个空模型,从Library: SimuLink窗口中找到需要的模块,将这些模块拖到空模型窗口中。将空模型窗口中的排好,并按要求连接。在保存好的模型窗口中,选Simulation\Paramters命令设置各模块的参数和仿真参数。给模型取一个名字,保存起来。选Simulation\Start命令,进行仿真。
六、实验报告
1、所采用方法的基本思路和计算公式。
2、仿真步骤及说明。
3、仿真过程及仿真结果分析
要点:
(1)系统的动态响应在几个采样周期内结束?
(2)系统的稳态响应有无波纹,D(z)是什么控制器?
(3)如果被控对象的参数变化为G(s)=9.8/s,情况会发生什么变化?说明什么问题?
4、实验的心得体会。
-
电力电子技术实验报告
电力电子技术实验报告学院信息科学与工程学院班级自动化学号姓名完成时间实验一三相脉冲移相触发电路1实验目的熟悉了解集成触发电路的工作…
-
电力电子技术 实验报告
中南大学电力电子技术实验报告专业班级自动化班姓名学号指导教师完成时间20xx年11月27日实验11三相脉冲移相触发电路一实验目的1…
-
电力电子技术实验讲义
20xx21111031张杨福电子信息工程1301班电子信息工程学院二一四年七月1电力电子技术实验讲义目录实验注意事项务必遵守2实…
-
电力电子技术实验大纲(20xx-10-24)
电力电子技术实验大纲电气信息学院专业中心实验室20xx版我们需要什么样的专业课实验报告书当进入大三以后会面对很多专业课程的实验项目…
-
电力电子技术实验讲义
电力电子技术实验指导书福建工程学院20xx年11月福建工程学院国脉信息学院电力电子技术实验目录电力电子实验的基本要求及注意事项1实…
-
陈庄小学仪器管理工作总结
本学期在学校各级领导的关心、配合下,学校仪器管理工作取得了一些成绩。在某些方面可以说上了一个新台阶,作为仪器管理员个人来说,也从思…
-
化学教研组工作总结
化学教研组工作总结化学组王红萍一年来,我们化学组在学校领导班子的正确领导和帮助下,在组内全体同志的齐心努力下,可以说较为圆满地完成…
-
20xx年新任办公室副主任个人工作总结
20xx年度工作总结现将全年个人工作总结如下:首先,要感谢局领导和各位同事对我真诚、无私的帮助和支持,使我完成了各项工作任务。其次…
-
对“地沟油”和餐橱废弃物的专项检查总结文档
开发区火炬东学区关于对“地沟油”和餐橱废弃物的专项检查总结为严厉打击将“地沟油”作为食用油使用的不法行为,切实抓好“地沟油”整治和…
-
生命教育总结报告
生命教育培训课总结日期:20xx年x月x日时间:45分钟本节生命教育课的内容共分为两个版块:一是播放《笨笨熊》视频并分享;二是小游…