自动控制原理


课程设计


课程设计任务书
学生姓名: 专业班级: 自动化
指导教师: 谭思云 工作单位: 自动化学院
题 目: 用MATLAB进行控制系统的滞后校正设计。
初始条件:已知一单位反馈系统的开环传递函数是

要求系统的静态速度误差系数 ,
, 。
。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)
1、用MATLAB作出满足初始条件的K值的系统伯德图,计算系统的幅值裕量和相位裕量。
2、系统前向通路中插入一相位滞后校正,确定校正网络的传递函数,并用MATLAB进行验证。
3、用MATLAB画出未校正和已校正系统的根轨迹。
4、课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。说明书的格式按照教务处标准书写。
时间安排:
1、课程设计任务书的布置,讲解 (半天)
2、根据任务书的要求进行设计构思。(半天)
3、熟悉MATLAB中的相关工具(一天)
4、系统设计与仿真分析。(三天)
5、撰写说明书。 (二天)
6、课程设计答辩(半天)
指导教师签名: 年 月 日
系主任(或责任教师)签名: 年 月 日

目录
1 滞后校正系统的设计系统滞后校正设计方案........................................................ 2
1.1满足稳定性条件的K值分析.......................................................................... 2
1.2 设计步骤......................................................................................................... 3
2 设计串联滞后校正.................................................................................................... 3
2.1校正前参数确定.............................................................................................. 3
3 系统前向通路中插入一相位滞后校正.................................................................... 5
3.1确定校正网络的传递函数.............................................................................. 5
3.2应用MATLAB进行验证.................................................................................... 6
3.3用MATLAB进行设计........................................................................................ 7
4 画出未校正和已校正系统的根轨迹........................................................................ 8
4.1 用MATLAB画出未校正系统和已校正系统的根轨迹................................... 8
5 设计总结.................................................................................................................... 9
6收获与体会................................................................................................................. 9
参考文献...................................................................................................................... 11
摘要
滞后校正的基本原理是利用滞后网络的高频幅值衰减特性使系统截止频率
下降,从而使系统获得足够的相位裕度。或者,是利用滞后网络的低通滤波特性,
使低频信号有较高的增益,从而提高了系统的稳态精度。可以说,滞后校正在保持暂态性能不变的基础上,提高开环增益。也可以等价地说滞后校正可以补偿因开环增益提高而发生的暂态性能的变化。
此外,本次课程设计还要使用Matlab软件绘制系统伯德图及根轨迹图。MATLAB是矩阵实验室公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两 大 部 分。熟 练 掌 握 MATLAB的 应 用对于自动控制原理的学校和本次课程设计都十分重要。
1 滞后校正系统的设计系统滞后校正设计方案
1.1满足稳定性条件的K值分析
基于主要任务要用MATLAB做出满足初始条件的最小K值的系统伯德图并计算系统的幅值裕量和相位裕量。从初始条件看出要求出K值最小值要保证它同时满足系统的稳定性和静态速度误差系数 。
。
用MATLAB做出满足初始条件的K值的系统伯德图,计算系统的幅值裕度和相位裕度。
首先,确定系统开环增益K值:

又

可得满足初始条件的K值:K=100
那么满足初始条件的K值的系统开环传递函数为:

1.2 设计步骤
所研究的系统为最小相位单位反馈系统,则采用频域法设计串联无源滞后网络的步骤如下:
1) 根据稳态速度误差 的要求,确定开环增益K;
的要求,确定开环增益K;
2) 利用已确定的的开环增益K,在校正前系统的对数频率特性波特图上,找出相角为 (
( )=
)= 的频率作为校正后系统的截止频率.
的频率作为校正后系统的截止频率.
3) 在未校正系统的波特图上取
 的分贝值,确定滞后网络参数
的分贝值,确定滞后网络参数 和T:
和T:
20lg =
= () (1-2)
() (1-2)
 =
= (1-3)
(1-3)
4) 验算已校正系统的相角裕度 和幅值裕度h。
和幅值裕度h。
2 设计串联滞后校正
2.1校正前参数确定
1.由已知的单位反馈系统的开环传递 ,
, 有如下计算:
有如下计算:

故有,
2. 用MATLAB求出系统校正前的幅值域度和相角裕度,并画出波特图:
在MATLAB中输入:
G=tf(100,[0.02 0.3 1 0]); [kg,r]=margin(G)
margin(G)
MATLAB得出的结果如下:
Transfer function:
100
----------------------
0.02 s^3 + 0.3 s^2 + s
Warning: The closed-loop system is unstable.
kg = 0.1500
r = -40.4367
运算得出的波特图如图2-1所示:
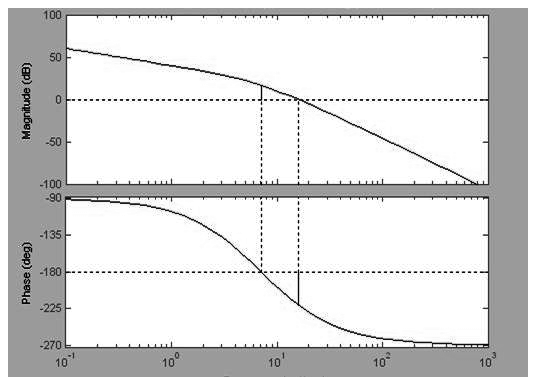
图 2-1 校正前系统的波特图
由图可以看出幅值裕度h(h=20lgkg)和相角裕度γ小于零,且γ负值较大,因此该系统不稳定,需要串联一个滞后校正环节进行校正,使系统趋于稳定。
3 系统前向通路中插入一相位滞后校正
3.1确定校正网络的传递函数
在系统前向通路中插入一相位滞后校正,确定校正网络的传递函数如下,
由 = -(180°--ε),式中ε一般取5°~10°,而
= -(180°--ε),式中ε一般取5°~10°,而 为题目要求的系统校正后的相角裕度,所以为
为题目要求的系统校正后的相角裕度,所以为
=-90°-arctan -arctan
-arctan

图3-1 校正前波特图上求取
则可以在上面得出的波特图中找到,=2.74rad/sec。
根据式(1-9)和式(1-10)确定滞后网络参数 和T:
和T:
20lg==20lg
=0.1
得出= =0.032, T=112.66;
=0.032, T=112.66;
校正环节的传递函数: 即为 :
即为 :
则校正后的传递函数为:

=
3.2应用MATLAB进行验证
>> G=tf(100*[3.61 1], conv([0.02,0.3,1,0],[112.66,1]))
[kg,r]=margin(G)
margin(G)
得到的MATLAB结果是:
Transfer function: 361 s + 100
2.253 s^4 + 33.82 s^3 + 113 s^2 + s
kg = 4.3042
r = 40.5160
系统校正后的波特图如图3-2所示:

图3-2 系统校正后的波特图
由上面得出的数据可以看出,在串联了一个滞后校正环节后,系统稳定 ,满足
,满足 ,增益裕度不小于10分贝。
,增益裕度不小于10分贝。
3.3用MATLAB进行设计
校正前和校正后的波特图如图3-3所示:

图3-3 校正前后波特图对比【未校正前波特图(上面一条)
校正后波特图(下面一条)】
4 画出未校正和已校正系统的根轨迹
4.1 用MATLAB画出未校正系统和已校正系统的根轨迹
MATLAB画出:
系统校正前的根轨迹为
MATLAB程序为:
num0=[0 100];
den0=[0.02 0.3 1 0];
num1=[365.4 100];
den1=[2.259 33.91 113.3 1 0];
subplot(2,1,1);rlocus(num1,den1);
subplot(2,1,2);rlocus(num0,den0);
校正前后根轨迹如图4-1所示

图4-1 校正前后根轨迹图对比
5 设计总结
在前向通道中串联滞后校正系统前后对比:
1.由校正前后波特图对比,可知校正前:kg0=0.1500,γ0=-40.4367;校正后:kg=4.3042,γ=40.5160,从而由此知在前向通道中串联滞后校正装置后,幅值裕度h=20lgkg和相位裕度γ的值,得到校正前系统h0<0,γ0<0,则开环传递函数为 的原系统不是稳定的;而校正后系统h>0,γ<0,则开环传递函数为
的原系统不是稳定的;而校正后系统h>0,γ<0,则开环传递函数为 的校正后系统是稳定的。
的校正后系统是稳定的。
2. 由校正前后根轨迹图对比(图4-1),可知校正后与校正前相比,根轨迹图上多了一个零点和一个极点,此外,通过对系统特征方程进行劳斯判据,判断系统的稳定性,从而求得开环增益K值的范围,校正前K值的范围为 ,而校正后K值的范围近似为
,而校正后K值的范围近似为 ,通过K值范围的扩大从而可知添加校正装置后提高了系统稳定性能。
,通过K值范围的扩大从而可知添加校正装置后提高了系统稳定性能。
6收获与体会
通过这次对控制系统的滞后校正设计的分析,让我对串联滞后校正环节有了更清晰的认识,同时也学会了公式编辑器的基本使用方法,加深了对课本知识的进一步理解,对所学的理论知识也有了更深刻的理解。
同时,这次课程设计让自己对Matlab软件的应用更加熟练,用它对控制系统进行频域分析,大大简化了计算和绘图步骤,计算机辅助设计已经成为现在设计各种系统的主要方法和手段,因此熟练掌握各种绘图软件显得尤为重要。在今后的学习中,需要发挥积极主动的精神,把所学知识与实践结合起来,努力掌握Matlab等相关软件的使用方法。
我体会到了学习自动控制原理,不仅要掌握书本上的内容,还要灵活思考,善于变换,在提出问题、分析问题、解决问题的过程中提高自己分析和解决实际问题的能力。要把理论知识与实践相结合起来,从而提高自己的实际动手能力和独立思考的能力。还让我懂得了自主学习和独立思考的重要性,还有做事要有恒心,有信心,愿意动脑子去想,就一定有所收获。
参考文献
[1] 王万良.自动控制原理.高等教育出版社.20##年
[2] 胡寿松.自动控制原理.科学出版社.20##年
[3] 胡寿松.自动控制原理同步辅导及习题全解.中国矿业大学出版社.20##年
[4] 薛定宇.控制系统计算机辅助设计---MATLAB语言及应用. 清华大学出版社.1996年
[5] 曹戈. MATLAB教材及实训.机械工业出版社.20##年
[6] 楼顺天.基于MATLAB的系统分析与设计.西安电子科技大学出版社.1999年
本科生课程设计成绩评定表

指导教师签字:
年 月 日
第二篇:自动控制原理试卷
《 自动控制原理 》期_末_试卷( A )
班级__________ 姓名___________ 学号____________ 得分 ___
一、 填空题(每空2分,共20分)
1、“经典控制理论”的内容是以 为基础的。
2、反馈控制原理是 的原理。
3、闭环控制系统又称为 系统。
4、系统的传递函数的 分布决定系统的动态特性。
5、支路是连接两个节点的定向线段,用支路增益表示方程式中两个变量的因果关系,因此支路相当于 。
6、为了保证系统稳定,则闭环极点都必须在 上。
7、 是描述系统稳态性能的一种性能指标,通常在阶跃函数、斜坡函数或加速度函数的作用下进行测定或计算。
8、控制系统的结构图既可以用于线性系统,也可以用于非线性系统,而 只适用于线性系统。
9、对控制系统的结构图进行简化的过程中应遵循 的原则。
10、在典型输入信号中,与单位阶跃函数 所对应的复数域表达式为 。
所对应的复数域表达式为 。
二、选择题(每题2分,共30分)
1、系统和输入已知,求输出并对动态特性进行研究,称为( )
A.系统综合 B.系统辨识 C.系统分析 D.系统设计
2、主要用于产生输入信号的元件称为( )
A.比较元件 B.给定元件 C.反馈元件 D.放大元件
3、如果被调量随着给定量的变化而变化,这种控制系统叫( )
A.恒值调节系统 B.随动系统 C.连续控制系统 D.数字控制系统
4、开环控制系统的的特征是没有( )
A.执行环节 B.给定环节 C.反馈环节 D.放大环节
5、时域分析的性能指标,哪个指标是反映相对稳定性的( )
A.上升时间 B.峰值时间 C.调整时间 D.最大超调量
6、某典型环节的传递函数是 ,则该环节是( )
,则该环节是( )
A.比例环节 B.积分环节 C.惯性环节 D.微分环节
7、在信号流图中,在支路上标明的是( )
A.输入 B.引出点 C.比较点 D.传递函数
8、当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( )
A.比例环节 B.微分环节 C.积分环节 D.惯性环节
9、与开环控制系统相比较,闭环控制系统通常对( )进行直接或间接地测量,通过反馈环节去影响控制信号。
A.输出量 B.输入量 C.扰动量 D.设定量
10、梅逊公式主要用来( )
A.判断稳定性 B.计算输入误差 C.求系统的传递函数 D.求系统的根轨迹
11、在系统对输入信号的时域响应中,其调整时间的长短是与( )指标密切相关。
A.允许的峰值时间 B.允许的超调量 C.允许的上升时间 D.允许的稳态误差
12、已知系统的单位脉冲响应函数是 ,则系统的传递函数是( )
,则系统的传递函数是( )
A. B.
B. C.
C. D.
D.
13、在信号流图中,只有( )不用节点表示。
A.输入 B.输出 C.比较点 D.方块图单元
14、设系统的特征方程为 ,则此系统中包含正实部特征的个数有( )
,则此系统中包含正实部特征的个数有( )
A.0 B.1 C.2 D.3
15、引出点前移越过一个方块图单元时,应在引出线支路上( )
A.并联越过的方块图单元 B.并联越过的方块图单元的倒数
C.串联越过的方块图单元 D.串联越过的方块图单元的倒数
三、简答题(每题5分,共15分)
1、什么是线性系统?线性系统的特征是什么?
2、建立微分方程的具体步骤是什么?
3、控制系统的传递函数的定义和应用范围是什么?
四、综合题(共35分)
1、绘制下图所示系统结构图对应的信号流图。(10分)

2、用梅森公式求下图所示的系统的传递函数Y(s)/R(s)。(10分)

3、系统如图所示,求使系统稳定的K值的范围。(15分)

-
《自动控制原理》课程学习心得体会
《自动控制原理》课程学习心得体会***(***)20xx级电子科学与技术我是一名电子科学类的学生,专业的培养目标就是要求我们能在电…
-
自动控制原理学习总结
班级:09自动化2班姓名:朱猛学号:0905071015自动控制原理是自动控制理论的基础,其主要内容包括:自动控制系统的基本组成和…
-
《自动控制原理》课程学习心得
摘要:本文根据自动控制原理的课程特点,结合自动控制原理课程的教学现状,在总结经验和教训的基础上,遵循理论联系实践的原则,结合mat…
-
20xx 自动控制原理知识点总结
自动控制原理知识点总结第一章1什么是自动控制填空自动控制是指在无人直接参与的情况下利用控制装置操纵受控对象是被控量等于给定值或按给…
-
自动控制原理总经典总结
自动控制原理总复习1第一章自动控制的基本概念一学习要点1自动控制基本术语自动控制系统自动控制系统被控量输入量干扰量受控对象控制器反…
-
学生会学习部个学期个人总结
学习部上个学期主要就是助班的奋斗这个活动,那我就主要总结一下这个活动以及从中收获到的东西。活动从宏观上来说分为三大部分,一:征文部…
-
义务捐书活动总结
我校修水工薛师傅自筹资金,购买了各种杂志,为同学们办起了“诚信书角”,提供学生免费的读书服务。他一直用自己的行动默默的为我们无私奉…
-
监察室工作总结
监察(审计)室二○○九年工作总结及二○一○年工作思路(20xx年x月x日)今年以来,监察(审计)室在局党组的直接领导下,按照年初制…
-
20xx年“6.26”期间禁毒宣传教育活动总结[1]
崇文中心学校20xx年“6.26”期间禁毒宣传教育活动总结根据上级文件精神及要求,我校开展了禁毒宣传教育活动。为了让广大师生充分认…
-
20xx届毕业生捐书活动总结
郑州轻工业学院20xx届毕业生捐书活动总结电气信息工程学院学生会生活部20xx年x月x日20xx年x月底,在20xx届毕业生离校之…