珠宝抛光机设计说明书
目录
第1章 绪论 .................................................................................................................................................... 1
1.1 研制背景及意义 ............................................................................................................................... 1
1.2抛光机的研究现状和发展趋势 ........................................................................................................ 2
1.3研究内容 ............................................................................................................................................ 3
第2章 珠宝抛光机总体方案设计 ................................................................................................................ 4
2.1 方案选择 ........................................................................................................................................... 4
2.2 执行机构 ........................................................................................................................................... 6
2.3 传动机构 ........................................................................................................................................... 6
2.4 支撑机构 ........................................................................................................................................... 6
2.5 外部机构 ........................................................................................................................................... 6
2.6 创新与特色简介 ............................................................................................................................... 7
第3章 珠宝抛光机执行机构的设计 ............................................................................................................ 7
3.1 执行机构的总体结构设计 ............................................................................................................... 7
3.2 驱动电机的选用 ............................................................................................................................... 7
3.3 联轴器的选用及校核 ....................................................................................................................... 8
3.4 轴承的选用及校核 ........................................................................................................................... 8
3.5 毛刷的设计 ....................................................................................................................................... 9
3.6 轴承座的选用 ................................................................................................................................. 11
3.7 电扇的选用 ..................................................................................................................................... 11
第4章 珠宝抛光机构传动机构的设计 ...................................................................................................... 11
4.1 导轨的选用 ..................................................................................................................................... 11
4.2 驱动电机的选用 ............................................................................................................................. 13
4.3 齿轮齿条计算及设计 ..................................................................................................................... 14
4.4 轴的设计及校核 ............................................................................................................................. 18
4.5 联轴器的选用及校核 ..................................................................................................................... 19
4.6 轴承的选取及校核 ......................................................................................................................... 19
第5章 抛光机三维建模 .............................................................................................................................. 19
5.1执行机构 .......................................................................................................................................... 20
5.2传动机构 .......................................................................................................................................... 20
5.3箱体及其装配 .................................................................................................................................. 21
第6章 设计总结 .......................................................................................................................................... 23
参考文献 ........................................................................................................................................................ 24
珠宝抛光机设计说明书
第1章 绪论
1.1 研制背景及意义
珍珠是一种珍贵的有机宝石,与玛瑙、水晶、玉石一起并称我国古代传统“四宝”。珍珠的内部结构主要包括由珍珠母贝分泌的珍珠质所形成的珍珠质层和由贝壳磨制而成的贝壳珠核层。珍珠质层主要由同心年轮状规则生长的文石晶体构成,对红外和可见光具有良好的穿透特性和较强的背向小角度散射,而贝壳珠核层则为平行层状特性,背向反射散射信号较弱。珍珠质量的好坏受大小、形状、颜色、光泽度及瑕疵状况的影响,评定珍珠质量的最主要标准是珍珠的光泽度及珍珠的色度均匀性, 因此,对于珍珠的光泽度及珍珠之间的色度均匀性的测量与判断尤为重要[1-2]。
珠宝首饰在执模镶嵌完成后,为更加美观、防止腐蚀,会在首饰表面进行电镀处理,而电镀之前需要对首饰进行表面处理。常见的表面处理包括光亮处理,除油处理和浸蚀处理等。其中,机械抛光是光亮处理中最常用的一种工艺,是首饰表面处理中最重要的一个环节,作为首饰镀前处理的最后工序,机械抛光的好坏直接影响首饰成品的电镀质量。
但是,抛磨镶石过程中无论如何精打细磨都会在首饰表面留下一些细微的锉痕、砂底抛光的擦痕,铣削孔口时,孔边的钻痕、修整边线的铲痕、夹具留下的夹痕、焊接残留的细小焊疤。国内的珠宝抛光大都采用人工,其效率低,表面光洁度差。辊子式球形珠宝抛光机能提高效率且获得较高的表面光洁度[5]。由于质量和效率都很高使得珠宝的成本大大得降低,珠宝也更具有观赏性。传统的珍珠加工技术主要是打孔与抛光,打孔是为了后续制作的需要,抛光能在一定程度上提高珍珠的光洁度与光泽[6]。由于缺乏必要的加工技术,导致我国高档珍珠少,产品附加值较低,珍珠的贸易额仅占世界的8%左右[7-8]。动力传动系统作为珠宝抛光机的一个必不可少的系统,好的传动系统在满足工作要求之外,还需要综合考虑低价格、高效率、高稳定性和高可靠性等因素。动力传动系统包括毛刷的水平移动速度,移动范围和毛刷的转动速度。其水平移动范围会影响珠宝是否都被抛光,而其转速和移动速度则会影响珠宝的抛光程度及珠宝的外光色泽。因此一个动力传动系统的好坏将直接决定该抛光机的性能,间接影响珠宝首饰外光和质量。企业期盼能有自动的抛光设备,这对提高生产效率具有重要现实意义[9]。 [4][3]
1
1.2抛光机的研究现状和发展趋势
抛光机是一种电动工具,抛光机由底座、抛盘、抛光织物、抛光罩及盖等基本元件组成。 电动机固定在底座上,固定抛光盘用的锥套通过螺钉与电动机轴相连。抛光织物通过套圈紧固在抛光盘上,电动机通过底座上的开关接通电源起动后,便可用手对试样施加压力在转动的抛光盘上进行抛光。抛光过程中加入的抛光液可通过固定在底座上的塑料盘中的排水管流入置于抛光机旁的方盘内。 抛光罩及盖可防止灰土及其他杂物在机器不使用时落在抛光织物上而影响使用效果。
日本秋田县里大学吴勇波教授提出的磁性抛光体(Magnetic Compound Fluid Polishing Too l)抛光技术。加工工具是将磁性复合流体(MCF)和磨粒粒子、植物纤维素均匀混合后在磁场条件下压缩后制得, 在磁场下呈半固态。
Kordonski二十世纪八十年代中期发明的磁流变抛光(Magneto2Rheo logical Finishing, MRF ) 是利用磁性流体的特性来改变其在磁场中的粘性进行抛光的技术。含有去离子水、铁质微粉、磨粒和经处理过的其他物质的磁流体由泵驱动, 稳定循环, 在有磁力作用地方表现为固体形式, 而在其他地方表现为液体形式。磁流体的这两种形态在循环中会交替出现。
最近Kim. D. J等针对铸铁结合剂金刚石固着磨料砂轮(A cast iron bonded diamond (CIB2D) wheel)采用电解加工过程修整法Electroiltic In2p ro2cess Dressing, EL ID[10] 。
Bond(1951)和Heydon和Day(1987)通过一种技术,其中被驱动的磁性材料周围的圆筒状的研磨表面的气体喷流。我们已经观察到脆性材料的领域,如NdFeB烧结,以这种方式产生的不利影响的表面剥落,这继而可能影响其磁性。此外,试图以制备晶体各向异性材料的领域,例如模具破坏熔淬火MQIII,可以导致生产扁圆由于其各向异性的机械性能的椭球[11]。
国外研究出气囊式抛光技术,气囊式抛光是一种新颖的非球面抛光工艺,是由英国伦敦大学光学科学实验室与Zeeko公司合作研究开发出来,主要针对的是大型光学镜面的加工制造。它采用具有一定充气压力的球形柔性气囊作为抛光工具和独特的进动原理,并通过计算机控制来完成工件的抛光加工,是一种富于竞争性的制造技术[12]。
国外还有研究出塑造离轴非球面表面的自动化计算机控制的抛光研磨机。这是一个自动化的非球面的过程,使用的研磨方法的开发和用Optika来解决这个问题。此过程需要的值是用技术去除因子(TRF),它被定义在相同的方式进行抛光,除去将这点三维坐标测量机上测得的接触方法。M14微粉用于在确定的TRF,而砂轮是由黄铜制成。确定的TRF不大于10%,这确保了良好的收敛性的非球面的过程和使得能够迅速消除在一个留量几十微米[13]。
现在国内对抛光机发展的现状主要是提高加工效率,提高抛光机的加工效率有两种途径:一是在 2
同一抛光机上采用多种转速;二是增大磨头直径但是磨头直径的增大,受到空间和成本限制,不是理想的解决途径鉴于此,对多转速抛光机的研发显的尤为重要和迫切。
国内很多人使用化学机械抛光(CMP)技术,化学机械抛光(CMP)技术是化学腐蚀作用和机械磨削作用协同效应的组合技术,它克服了单纯化学抛光和单纯机械抛光的缺点,综合了两者的优势,把化学作用和机械作用结合起来,借助于超微粒子的机械研磨作用以及抛光液的化学腐蚀作用,在被研磨的介质表面(如单晶硅片 氧化物薄膜 金属薄膜等)上形成光洁平坦表面[14]。
国内研制的M PG21/18 抛光机控制精米抛光,采用模块化设计满足各种工艺中作为初抛和精抛需要。该机主要组成部分包括:喷雾着水部分,水分检测与加水控制部分,水料混合装置,主抛光部分,精抛光部分,抛光室压力控制系统, 供水系统,风力系统等[15]。
我国还有人研究光纤连接器组合研磨与抛光技术,主要集中在研磨与抛光的工艺性和相关的研磨与抛光设备。在研磨抛光设备领域,主要采纳行星式、曲柄式和曲线式研磨抛光机。设备虽然简单,但工艺过程难以控制,生产中需要在研磨过程获得高精密的平面,然后利用抛光过程的运动与接触变形产生相应的微球面。这需要加工过程多台设备或者同台设备交换不同的研磨抛光盘和工艺参量,要划分粗精加工几个步骤,才能得到要求指标的连接器端面。是光纤连接器端面加工的新技术方法。通过对光纤连接器端面加工的基本问题、机器的布局、运动和结构等设计进行分析和探讨,以及利用UG-CAD软件的运动仿真模块进行仿真,可以确定,保证加工的形状精度和表面完整性[16]。
1.3研究内容
机械抛光是利用抛光轮在高速旋转时珠宝与抛光轮以及铋粉之间产生的高温和摩擦,使珍珠的可塑性得以提高,改善表面不平细微处,从而改善珠宝首饰的光亮度,提高珠宝的质量。
对于珠宝的抛光,并不是抛光时间越长抛得越好。抛光中应严格按照操作步骤进行。抛光时主要用毛刷,在抛光珍珠时,应事先准备一个金属丝制作的挂钩, 将珍珠挂于其上。开动抛光电动机,旋转抛光毛刷,就可以抛光。毛刷主要是对珍珠表面进行抛光。操作过程中设置的毛刷要防止跳跃式抛光和用力轻重不匀,切忌在珍珠表面某一处过长时间抛磨,这样不仅增加珍珠的损耗,而且由于摩擦产生的热量过高,珍珠容易变形,同时温度过高会使珍珠表面缺少光泽度,但也不能抛光不到位。毛刷的匀速转动和匀速移动使得珠宝抛光机可以对大量的珠宝进行抛光且抛光出的珠宝颜色鲜艳,使其达到人工加工效果。
此次机械设计大赛的主题为“机器换人”,根据大赛所给题目的要求,我们进行了合理设计,成功的做出了实物,并且能够稳定的完成规定的动作。
3
第2章 珠宝抛光机总体方案设计
2.1 方案选择
制定总体方案,就是在深入调查和分析的基础上,提出所设计的工艺备方法、运动和布局、传动和控制及结构的性能等方面的方案。这个总体方案是部件和零件的设计依据,对整个设备设计的影响很大,是至关重要的一步。因此,在拟定总体方案过程中,必须综合地考虑对设备的各项要求,使所定方案技术先进、经济效益高。
在设计之初,有四种设计方案构想:
方案一:采用单列棍子式球形珠宝抛光机,毛刷在转动的同时,还要做直线往复运动。由于抛光珠宝首饰对毛刷的要求比较高,故选用的毛刷其价格比较高,该方案的优点是成本较低,结构比较简单。缺点是由于是单列棍子式,所以其效率比较低下。如图2-1。
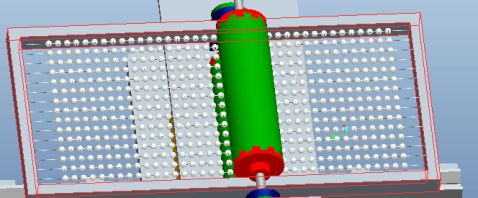
图2-1 方案一图
方案二:采用单列棍子式球形珠宝抛光机,毛刷固定在一个位置上转动,珍珠框架做直线往复运动,也可以达到预期效果。该方案的优点是成本较低,可以不用设计升降系统,结构简单。缺点是效率比较低下,由于珍珠框架尺寸较大导致机器整体体积过大。
方案三:采用多列棍子式球形珠宝抛光机,毛刷一个挨着一个,使其覆盖面积可以不用做水平直线运动就可以完成对全部珍珠的抛光。该方案的优点是可以忽略水平运动的动作,效率也是最高 4
的。但成本也是最高的,且其传动结构比较复杂。如图2-2。
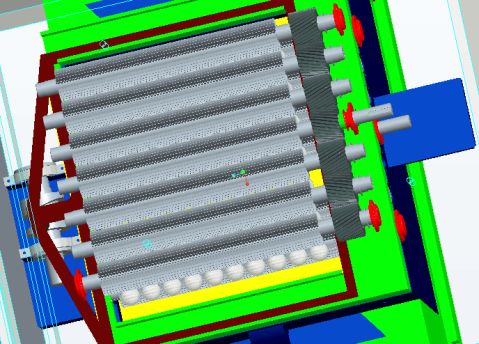
图2-2 方案三图
方案四:采用双列棍子式球形珠宝抛光机,固定珍珠框架,使毛刷在旋转的同时做水平往复运动。
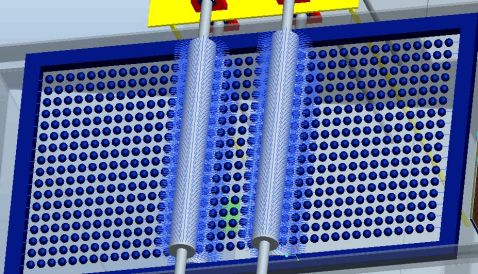
图2-3 方案四图
5
考虑到该方案四相比方案三成本低,结果简单;相比方案一效率高;相比方案二,结果紧凑,体积相对小。故本次设计,采用方案四。
2.2 执行机构
该机器执行系统即毛刷。根据加工工艺要求,毛刷的要求有以下几方面:第一,刷毛有一定的刚度,这样在滚动摩擦时才有一定力度,达到人工擦拭的效果,但是又不能过硬对珍珠表面造成刮伤;第二,其中一组刷子(本次设计为下面的那组毛刷)在工作时能上下移动,这样可以保证珍珠框架可以快速且顺利地安装和拆卸;第三,由于毛刷在抛光过程中与珍珠摩擦产生热量,一段时间后就会损坏,损坏的毛刷会影响珍珠被抛光的质量,所以毛刷要定期更换,故毛刷应该易于更换。
2.3 传动机构
传动机构是由五个电机和齿轮齿条共同组成,采用四个相同型号的电动机分别驱动上下两组毛刷。因为珍珠承受沿钢丝方向的载荷也是非常有限的,故两毛刷运动时应该转动方向一致,且两组毛刷的位置尽可能关于珍珠框架上下对称,以抵消对珍珠产生的沿钢丝方向的力。
其次,因为工序对力的大小有严格要求,毛刷转动速度对摩擦力的大小影响也很大,所以要查阅资料并且多次实验后选定对珍珠抛光质量最高的毛刷转速。
由于选定的是双列棍子式,在一次水平来回运动周期后,钢丝上各段的珍珠被抛光的次数是不一样的,为了竟可能均匀抛光,在抛光次数少的几段珍珠,水平速度应该慢一点,抛光次数较多的几段珍珠速度快一点。这样尽可能保证各颗珍珠被抛光的时间是一样的。
2.4 支撑机构
支撑机构包括对珍珠框架的支撑,对毛刷的支撑及对电机的支撑。首先,在加工过程中,能保证珍珠框架能迅速顺利安装同时,珍珠框架必须能保持固定的位置保持不变,同时能承受各个方向的力,在加工结束后,珍珠框架能迅速顺利拆卸。其次,在加工过程中,两毛刷相对珍珠的距离必须保持稳定不变。这样才能保证摩擦时对珍珠产生的力大小将保持不变,从而保证珍珠抛光的质量。最后,连接毛刷的两个电机也要有个支撑机构。支撑架要有良好的刚度和强度。
2.5 外部机构
因铋粉价格昂贵,对铋粉进行回收利用,将会大大降低成本。故必须设计一个密封箱体完全包 6
裹两毛刷,增加回收铋粉的装置,在加工结束后箱体能打开,既可防止铋粉外溢浪费,也提高了安全性。
2.6 创新与特色简介
珠宝抛光机的研制改变了目前企业用人工打磨珍珠这种低效率高成本的生产方式,使得企业的机械化程度进一步提高。珠宝抛光机有以下4个优点:
(1)解决了人工问题,提高了生产效率;
(2)利用单片机进行控制,使毛刷和传动系统都能换向变速;
(3)最大程度上做到了对铋粉的回收利用;
(4)适用于不同直径的珍珠。
第3章 珠宝抛光机执行机构的设计
3.1 执行机构的总体结构设计
本次设计采用双列棍子式球形珠宝抛光机,为使两组毛刷转动来抛光珍珠,决定设计下图结构,如图3-1:
图3-1 总体结构图
确定好结构,下面便可以对该方案的进行电动机的选用,对轴,齿轮进行设计等。
3.2 驱动电机的选用
珠宝抛光机的驱动系统需要用控制系统控制其经起动、制动、反转和转速,要求电动机有较小转动惯量和较强的过载能力,因此我们选用步进电机。
抛光机所需的功率PW应由机器工作阻力和运动参数计算确定。
假设一组毛刷在打磨珍珠时所受 7
到的摩擦力为f=10N,距离d1=50mm。则可计算力矩T1:
T1=fd
=(50×10)/1000N.m
=0.5N.m
因此选用42步进电机。
3.3 联轴器的选用及校核
电机与轴相连的联轴器
根据该轴径,试选梅花联轴器,再进行校核:
公称转矩:T0=1910N.mm
由表14-1查得:KA=1.3
Tca=KAT0
=1.3×1910N.mm
=2483N.mm≤25000N.mm。
满足工作要求。
3.4 轴承的选用及校核
根据运转时有轻微冲击,预期寿命为105小时,进行校核。
根据轴与轴承装配轴段的轴径d=10mm,无轴向力,故试选用6700-2RS非标轴承 深沟球轴承,此轴承的基本额定动载C0=15000N,再进行校核:
计算得轴质量约为1kg,故令Fr=10N,Fa=0N。
Fa/Fr=0。
根据表13-5,深沟球轴承的最大e值为0.44,故此时:
Fa/Fr=0≤0.44。
按照表13-6,fp=1.0~1.2,取fp=1.2。
按照表13-5,X=1,Y=0,则:
P=1.2×10N=12N。
Lh=106/60n1(C/P)3
=1.15×10h≥105h。
满足工作要求。
8 10
3.5 毛刷的设计
工业毛刷应用范围几乎覆盖所有行业,其主要用途是工业化生产过程中的清洗、除尘、抛光等。按制作工艺来分,基本上可分为五大类:植毛刷、条形刷、弹簧刷、麻花刷、注塑刷等。按使用类别可分为毛刷辊、滚筒毛刷、毛刷轮、圆盘刷、条刷、板材刷、异形刷等。按刷丝材料可分为尼龙刷、钢丝刷、铜丝刷、塑料刷、马毛刷、猪鬃刷、剑麻刷、磨料刷、棉线刷等。工业毛刷产品有:毛刷辊,滚筒毛刷,钢丝刷,条形刷,皮带刷,圆盘刷,弹簧刷,尼龙刷,橡胶辊,海绵吸水辊,环卫车扫路刷,壁炉烟囱刷,洗瓶刷管道刷,玻璃清洗机毛刷辊,水果蔬菜清洗机毛刷辊,纺织印染业毛刷,陶瓷釉线刷,造纸印刷设备胶辊,防静电毛刷,金属抛光研磨刷,金属酸洗毛刷辊,自动擦鞋机毛刷轮等其它特殊用刷。各材料分类机器用途: 1. PBT丝的弹性较尼龙刷丝要好,但耐磨性不及610,PBT的性能较软,最适用于精细部件的清洗去污,比如汽车表面清洗,
2. 尼龙610(PA66、PA6)刷丝抗磨损性能较好,具有耐高温耐酸碱等特性,弹性较好,适用于家庭除尘和清洗中毛刷部件,比如吸尘器滚刷、毛刷辊、毛刷平台等等;
3. 尼龙612或尼龙1010的弹性最好,成本也最高,但耐磨性不及610,外观有比较出色的表现,抗冲击、抗老化等性能也非常好,最适合用于工业设备及门窗等防尘部;
4. 聚丙烯(PP)刷丝,具有耐酸碱等特性,但弹性不是很好,长时间工作容易变形难于恢复,所以适用于工业除尘和清洗中针对较粗犷的部件,比如矿山码头的除尘,环卫车的扫地刷等等;
5. PE丝是几类刷丝中较柔软的刷丝,常应用于汽车清洁刷上,加上起绒工艺,便于对汽车漆面的保护;
6. 猪鬃常用于洗浴刷或贵重物件的抛光,如金器、宝石、钢琴等表面的处理,也适用硬质合金的抛光研磨;
7. 马毛较猪鬃柔软,更易清除浮灰,常使用于高档家庭清洁产品,或适用于工业清除浮灰等用途;
8. 金属丝如钢丝、铜丝、一般用于金属表面去毛刺等处理,其耐磨性能好;
9. 磨料尼龙丝(分碳化硅磨料丝、氧化铝磨料丝、金刚石磨料丝),具有很好的耐磨和耐酸碱性能,常用于PCB的表面处理、镀锌板酸洗线,以及金属加工、抛光去毛刺等方面使用;
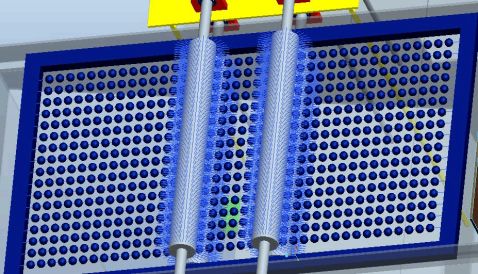
10. 剑麻刷丝,具有很好的韧性,耐高温、吸油脂,常用于锅刷或高温、去油用等方面的用途。 在本设计中我们考虑使用尼龙610。考虑到毛刷与珍珠长时间接触摩擦易损坏,为了方便更换,采用毛刷与带动毛刷转动的轴分开设计。如图3-5为毛刷工作时的示意图
9
图3-5 毛刷工作示意图
先是人工将珍珠穿在珍珠框架的铁丝上,之后将该框架浸入某化学药剂溶液中,取出后晾干,珍珠便固定在铁丝的某个位置上。在箱底铺一层铋粉,之后毛刷转动和水平运动对珍珠进行抛光抛光。
图3-6为执行系统的装配简图:
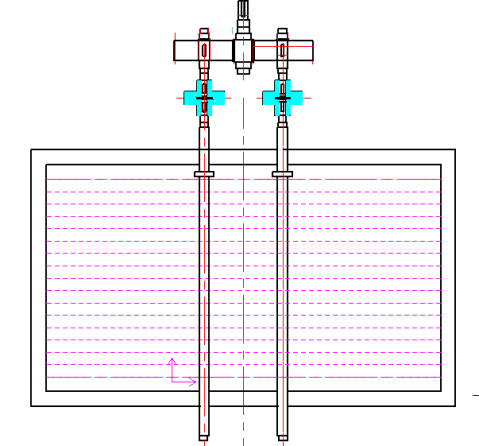
图3-5 执行系统装配简图
10
3.6 轴承座的选用
根据实际需要,选择SK10光轴支架。
3.7 电扇的选用
根据实际需要,选择220V小型散热分散。
第4章 珠宝抛光机构传动机构的设计
4.1 导轨的选用
导轨的功用是导向和承载。在平移运动导轨中目前应用最广、发展最快的是滚动直线导轨,这种导轨在两个相对运动部件之间有滚动体,摩擦系数低且稳定,通过施加预载可以完全消除间隙,因而具体精度、风度、和寿命都很高的特点,而且,由于目前已生产出各种标准元件,所以只要按要求选用即可,设计和使用都很方便。滚动平移关节导轨的缺点是阻尼小,对滚道上脏物敏感,需要有专门的防尘保护装置,结构尺寸相对较大。目前随着准滚动件制造技术的发展,结构尺寸已变得越来越紧凑,因而使用也越来越广泛。
1.导轨设计的基本要求
导轨主要是用来保证各运动部件的相对位置和相对运动精度,以及用来承受载荷(包括工作台、滑板部件的重量)。
对导轨性能的基本要求是导向精度高、刚度大、耐磨性好、精度保持性好、运动灵活而平稳、结构简单和工艺性好。
(1)导向精度。导向精度是导轨副的重要精度指标。所谓导向精度就是指动导轨运动轨迹的精确度。运动件的实际运动轨迹与给定方向之间的偏差越小,则导向精度越高。影响导向精度的主要因素有导轨的结构类型、导轨的几何精度和接触精度、导轨和机座的刚度、导轨的油膜厚度刚度及导轨和机座的热变形等。
(2)刚度。导轨受力产生变形,其中有自身变形、局部变形和接触变形。导轨自身变形是由于作用在导轨面上的零部件重量造成的。这种变形通常会影响加工精度。为了减小这类变形量,常需要在结构尺寸及筋板布置上采取措施,或将导轨面预先加工成中凸的形状,用以补偿受力后的弯曲变形。有时还要设置补偿装置。
(3)耐磨性。工作台滑板运动一段时间后,将会产生不同程度的不均匀磨损,就会影响精度,从而影响仪器精度。导轨耐磨性与摩擦性质、导轨材料、加工工艺方法以及受力情况有关。提高导轨的耐 11
磨性是提高仪器使用寿命的重要途径。
(4)运动平稳性。导轨运动的不平稳性主要表现在低速运动时出现速度不均匀,即所谓爬行现象。通常是在电机接受低速运转指令作匀速旋转时,带动丝杠也随着作等速转动,而此时工作台却出现一快一慢或一跳一停的爬行现象。爬行现象不仅影响工作台稳定移动,同时也影响摩擦因数随速度变化和系统刚度差。
而导轨主要分为滑动摩擦导轨与滚动摩擦导轨。滑动导轨是支承件和运动件直接接触的导轨。优点是结构简单、制造容易且接触刚度大。缺点是摩擦阻力大,磨损快,动、静摩擦因数差别大,低速度时易产生爬行。
滚动摩擦导轨是在两导轨面之间放入滚珠、滚柱或滚针等滚动体,使导轨运动处于滚动摩擦状态。由于滚动摩擦阻力小,使工作台移动灵敏,低速移动时也不产生爬行。工作台起动和运行消耗的功率小,滚动导轨磨损小,保持精度持久性好,故在仪器中广泛应用。但是,这种导轨是点或线接触,故抗振性差,接触应力大,所以在设计这种导轨时,对导轨的直线性和滚动体的尺寸精度要求高。但是造价很高。
在本设计中,考虑经济因素采用SBR铝托圆柱导轨。在本设计中导轨只承受机器重力作用。先预估机器总质量为60kg,事实上远低于该重量,因为假设每天开机8小时,一年按300个工作日计算,期望寿命为8年进行校核(即为14400h)。
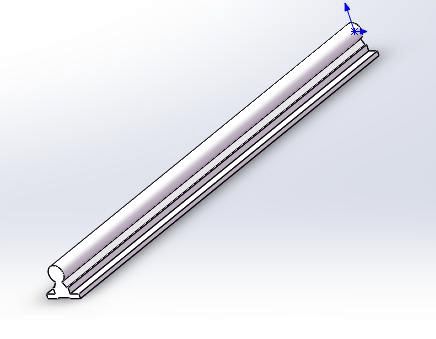
图 4-1 导轨图
12
它可根据动载荷作用下列公式进行计算:
L=50×[CafHfTfC/(fWF)]3 (4-1)
式中:
L为滚动导轨副的额定寿命(km);
Ca为额定动载荷(N),在初选导轨型号的参数中可以查出;
F为每个滑块上的工作载荷(N);
fH为硬度系数,导轨面的硬度为58~64HRC时,fH=1.0,为55HRC时;
fT为温度系数,当工作温度不超过100℃时,fT=1;fC=0.66;
fW为载荷速度系数,无冲击振动或v≤15m/min时,fW=1~1.5,轻冲击振动或15m/min<v<m/min时fW=1.5~2。
现在预估其载荷Ca=850N。由Ca=850N;F=G/4=1000/4=150N;fH=1.0;fT=1;fC=0.66;fW=1.2可得:
L=50×[CafHfTfC/(fWF)]3
=50×[850×1×1×0.66/(1.2×150)]3
=1513.7(km)。
如果把距离额定寿命L换算为小时额定寿命Lh(h),则:
Lh=L103/(2×60nS)式中:
S为移动件行程长度(m),设为0.6m;
n为移动件每分钟往复次数(min-1),设为1min-1。则:
Lh=L103/(2×60nS)
=1513.7×103/(2×1×0.6×60)
=21023.6h>14400h。
满足工作要求。
4.2 驱动电机的选用
电动机的调速与控制,是工农业各类机械及办公、民生电器设备的基础技术之一。在机械系统中,使用比较广泛的电动机有两大类,一类是动力用电动机,如感应式异步电动机、同步电动机等;另一类是控制用电动机,如力矩电动机、步进电动机、开关磁阻电动机、变频调速电动机和各种交流或直流伺服电动机等。
由于步进电机可直接将电脉冲信号转换成转角,每输入一个脉冲,步进电机就回转一定的角度, 13
其角度的大小与脉冲数成正比,旋转方向取决于输入脉冲的顺序。步进电机可在很宽的范围内,通过改变脉冲频率来调速,能够快速起动、反转和制动,有较强的阻碍偏离稳定的抗力。步进电动机是数字电子系统的重要配套机电产品。通过对给定子绕组施加合适的励磁电流,步进电动机的转子可以非常精确地以每步分数度的步距运动。所以可以作为一种元件用在需要较高角度精度的机电控制系统中。步进电动机已经在很宽广的领域得到了应用,如数控电动工具、打印机、绘图仪和磁盘驱动器等。
由于在本设计中为了能够实现加工不同直径的珍珠,应经常改变电机旋转速度,所以采用了步进电机驱动。
导轨采用灰铸铁HT200,查得HT200静摩擦系数大于动摩擦系数为0.27,取摩擦系数μ=0.3,该抛光机的质量为20kg,则:
工作时所受的最大阻力:
Ff=20×10×0.3=60N。
假设传动直径D为10mm(取较大值),便可得出转矩:
T=FfD/2
=60×10/2
=300N.mm。
故选用42BYGH47-401A永磁感应式步进电机,保持转矩为550N.mm。满足上述的工作要求。
4.3 齿轮齿条计算及设计
按工作寿命为15年(假设每年工作300天),两班制,进行校核。
齿轮选用40Cr(调质),硬度为280HBS,齿条的材料为45钢(调质),硬度为240HBS,二者之差为40HBS。精度等级选7级精度。选齿轮齿数Z1=28,
1.按齿面接触强度计算设计:
(1)试选:Kt=1.3。
(2)转矩:T1=6800N.mm。
(3)齿宽系数:Φd=1。
(4)由表查得材料的弹性影响系数:ZE=189.8MPa1/2。
(5)由表10-21d按齿面硬度查得小齿轮的接触疲劳强度极限:σHlim1=600MPa,大齿轮的接触疲劳强度极限:σHlim2=550MPa。
(6)由于水平往复运动时的速度较慢,设最大速度为vmax=0.1m/s(取较大值),一分钟一个来回运动: 14
n1max=60000v/(Πd)=64r/min,
N1=60n1maxjLh
=60×64×(2×8×300×15)
=2.76×108,
N2=60×2×(2×8×300×15)
=8.64×106。
(7)由图10-19取接触疲劳寿命系数:KNH1=1.02;KNH2=1.35。
(8)计算接触疲劳许用应力:
取失效概率为1%,安全系数S=1,得:
[σH]1=KNH1σHlim1/S
= 1.02×600
=612MPa,
[σH]2=KNH2σHlim2/S
=1.35×550
=742,5MPa。
(9)计算齿轮传递的分度圆直径,带入??H?中较小的值: dlt≥ 2.32[(KtT1/Φd)(u+1/u)(ZE/[σH])]1/3 =2.32[(1.3×7100/1)×(1/1)×(189.8/612)]1/3 =22.30mm。
(10)圆周速度v:
vmax=0.1m/s。
(11)计算齿宽b:
b= Φddlt
=1×22.30mm
=22.30mm。
(12)计算齿宽与齿高之比b/h: 模数:mt=dlt/Z
=22.30/28mm
=0.796mm,
15
齿高:h=2.25mt=1.79mm,
b/h=22.30/1.79=12.45 。
(13)计算载荷系数:
根据vmax=0.1m/s,7级精度,由图10-8查得动载系数KV=1, 直齿轮,KHα=KFα=1,
由表10-2查得使用系数KA=1,
由表10-4用插值法查得7级精度,小齿轮相对支承对称布置时: KHβ=1.29,
由b/h=12.45,KHβ=1.3查图10-13得KFβ=1.25,
故载荷系数:
K=KAKVKHαKHβ
=1×1.15×1×1.3
=1.29。
(14)按实际的载荷系数校正所算得的分度圆直径得:
d1=dlt(K/Kt)1
=22.30×(1.29/1.3)1/3
=22.30mm。
(15)计算模数m:
m=d1/Z=0.796mm。
2.按齿根弯曲强度设计
弯曲强度的设计公式为:m≥{(2KT1/ΦdZ12)YsaYfa/[σF]}1/3。 确定公式内的各计算数值:
(1)由图10-20c查得,齿轮的弯曲疲劳强的极限:σFE1=500MPa;齿条的弯曲疲劳强的极限:σFE2=380MPa。
(2)由图10-18取弯曲疲劳寿命系数KFN1=0.95,KFN2=1.18。
(3)计算弯曲疲劳许用应力:
取弯曲疲劳安全系数S=1.4,由式(3-2)得:
[σF]1=KFH1 σFE1/S
= 0.95×500/1.4
=339.3 MPa,
16
[σF]2=KFH2 σFE2/S
= 1.18×380/1.4
=320.3 MPa,。
(4)计算载荷系数K:
K=KAKVKFαKFβ
=1×1.15×1×1.26
=1.25。
(5)查取齿形系数及应力校正系数:
查表10-5得:
YFa1=2.80,Ysa1=1.55,
YFa1=2.06,Ysa1=1.97;。
(6)计算齿轮、齿条的YFaYsa/[σF]并加以比较:
YFa1Ysa1/[σF]1
=2.80×1.55/339.3
=0.012791,
YFa2Ysa2/[σF]2
=2.06×1.97/320.3
=0.01267。
大齿轮的数值大。
(7)设计计算:
m≥{(2KT1/ΦdZ12)YsaYfa/[σF]}1/3
={(2×1.25×6800/202)×0.012791}1/3
=0.82797mm。
对比计算结果,由齿面接触疲劳强度计算的模数m大于由齿根弯曲疲劳强度计算的模数,由于齿轮模数m的大小主要取决于弯曲强度所决定的承载能力,而齿面接触疲劳强度所决定的承载能力,仅与齿轮直径有关,可取由弯曲强度算得的模数0.796并就近圆整为标准值m=1mm,按接触强度算得的分度圆直径考虑到轴,轴承及联轴器的选用,这里取大值d1=28mm,算出齿轮齿数:
Z1=28/2=28。
3.几何尺寸计算
(1)计算分度圆直径:
17
d1=28mm。
(2)计算齿轮宽度:
b=Φdd1=28mm,
取B2=30mm,B1=35mm。
图4-2为传动系统的三维图:
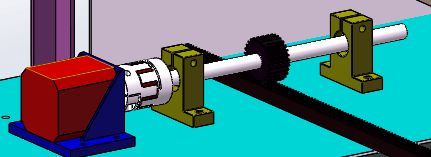
图4-2 传动系统三维图
4.4 轴的设计及校核
由于此处的轴几乎只承受扭矩作用,且载荷较平稳,无轴向载荷,且只做单向旋转。故A0取较小值。轴的材料采用45号钢,A0=110。
由T=9549P/n得:
P=Tn/9549
=5.8×64/9549kw
=0.04kw
d≥A0(P/n)1/3
=110×(0.04/64)1/3
=9.40mm,
由于该轴要与42BYGH47-401A永磁感应式步进电机相连接,该电机的轴径为5mm,考虑到联轴器的问题,故取轴径为10mm。
18
4.5 联轴器的选用及校核
根据该轴径,试选梅花联轴器,再进行校核:
公称转矩:T0=1910N.mm
由表14-1查得:KA=1.3
Tca=KAT0
=1.3×1910N.mm
=2483N.mm≤25000N.mm。
满足工作要求。
4.6 轴承的选取及校核
根据运转时有轻微冲击,预期寿命为105小时,进行校核。
根据轴与轴承装配轴段的轴径d=10mm,无轴向力,故试选用6700-2RS非标轴承 深沟球轴承,此轴承的基本额定动载C0=15000N,再进行校核:
计算得轴质量约为1kg,故令Fr=10N,Fa=0N。
Fa/Fr=0。
根据表13-5,深沟球轴承的最大e值为0.44,故此时:
Fa/Fr=0≤0.44。
按照表13-6,fp=1.0~1.2,取fp=1.2。
按照表13-5,X=1,Y=0,则:
P=1.2×10N=12N。
Lh=106/60n1(C/P)3
=1.15×10h≥105h。
满足工作要求。 10
第5章 抛光机三维建模
19
5.1执行机构
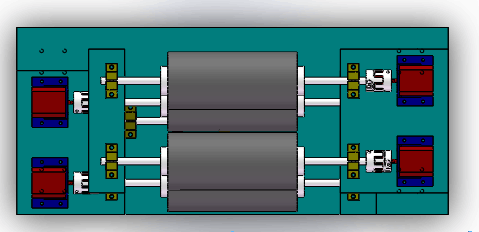
图5-1 操作机构装配图
从右左端开始分别为电机,联轴器,齿轮箱,联轴器,轴承和轴承座,毛刷,轴承和轴承座。电机通过齿轮箱将转速降到适当的范围联轴器与毛刷轴相连,从而实现刷子的转动。齿轮箱通过轴和刷子分开设计,刷子容易磨损,分开设计刷子易于更换。
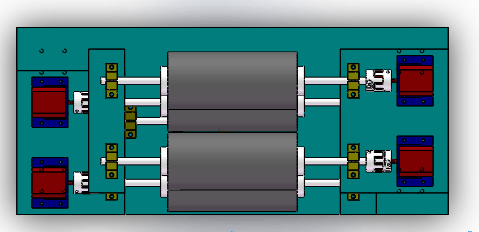
5.2传动机构
如图5-2

图5-2 传动机构装配图
从右到左分别为电机,联轴器,轴承和轴承座,齿轮轴和齿条,轴承和轴承座。传动机构由电机通过齿轮齿条的啮合传动,实现水平往复运动。
20
5.3箱体及其装配
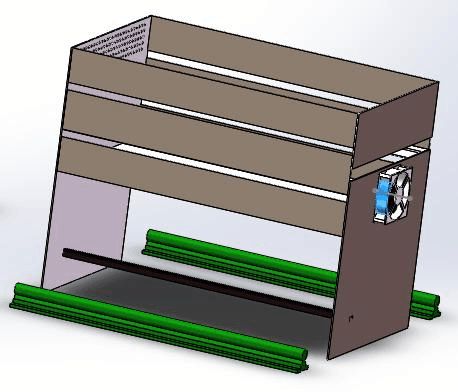
图5-3 箱体图
为了把箱体做成密封的,又不干涉轴的水平运动,在轴的移动路线上加材质柔软的海绵来防止铋粉外溢,红色区域及为中间隔开的海绵,由于海绵柔软性和弹性好,阻力也小,轴在左右运动时受到的阻力小,而且可以达到密封的效果,防止铋粉外溢。
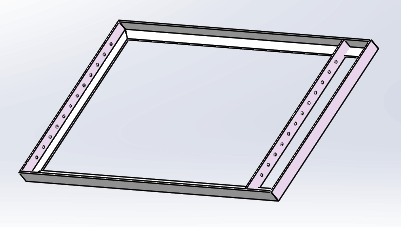
图5-4 固定架
将珍珠框架安装到固定架上,再把整体装入箱体,便可迅速完成定位。如图5-5。
21
图5-5 珍珠框架装配图
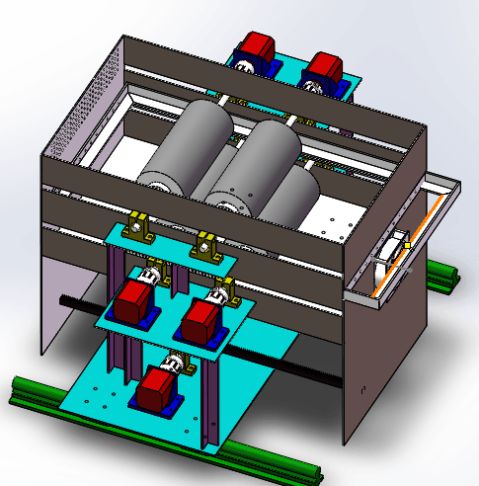
图5-6 抛光机总装图
22
第6章 设计总结
设计就是一个不断发现问题和解决问题的过程,在此次抛光机的设计过程中,我们学会了做事首先要有思路,因为思路决定出路;更重要的是我们学会了合作共事,合作的力量是无穷大的。每个人对此次设计制作过程提出各种意见和建议,才能让抛光机展示在我们面前。
23
参考文献
[1] 童银洪,邓陈茂,陈敬中.中国珍珠业的历史、现状和发展[J].中国石.2005,26(7):92~93
[2] 杨明月,郭守国,史凌云. 珍珠漂白增光技术的发展[J] . 中国宝石,2003 ,14(3):86~87
[3]雷红,雒建斌,张朝辉.化学机械抛光技术的研究进展[N].上海大学学报,2003.12(自然科学版)
[4]崔晓晓,杨杨.浅谈珠宝首饰的机械抛光工艺[J].超硬材料工程,2010,22(1):52~54
[5] 邓陈茂, 童银洪. 南珠养殖和加工技术[M]. 北京: 中国农业出版社. 2004,22~39
[6] 赵明森. 我国淡水珍珠生产的现状及发展对策[J] . 科学养鱼, 2003 , 11(2) :3~4
[7] 刘雯雯,李立平. 珍珠的金黄色染色工艺及染色珍珠的鉴定[M].北京,2002,122~131
[8] 徐毛喜,付剑夫,邱齐骏, 孙小兵. 池碟蚌育珠及珍珠加工技术[D].江西省抚州市水
[9] 霍晓兰,李立平,刘雯雯. 刻面珍珠的加工工艺及其品质评价[J] . 宝石和宝石学杂
志,2007 , 28(3): 41~44
[10] 方海生, 胡涤新, 邓乾发, 袁巨龙. 超精密研磨技术的现状及发展趋势[J]. 轻工机械,2007,25(4):10~12
[11]L Folks, R Street, G Warburton and R C Woodward. A sphere forming and polishing machine[J]. Meas. Sci. Technol ,1994,779~781
[12] 余顺周,姚英学,高 波,谢大纲. 气囊式抛光机数控系统的研究与开发[J]. 机床设计研究,2007,(2):17~19
[13]V. A. Gorshkov,A. S. Nevrov, A. S. Savel’ev, and A. V. Podobryanski. Shaping off-axis aspheric surfaces on automated computer-controlled polishing–lapping machines[J].J. Opt. Technol,78(4):239~241
[14] 高文泉,丁彭刚,徐存良. 化学机械抛光设备关键技术研究[J].电子工业专用设备,2012,(204):12~15
[15] 张永林,胡志刚,易启伟,周立汉.智能着水与压力控制精米抛光机的研制[J].农业工程学报,2006,22(7):97~100
[16] 吕玉山,王军,孙建章,段伶俐. 光纤连接器端面多工位自动研磨与抛光机设计[J]. 设计与研究,2008,
(7):43~46
[17] 濮良贵, 纪名刚. 机械设计. 高等教育出版社. 2005,211~213
[18] 孙桓, 陈作模,葛文杰. 机械原理. 高等教育出版社. 2004,180 a)
24
-
首饰毕业设计说明
网中国纹样首饰设计说明书摘要网存在于有形与无形有形如渔网蛛网无形如家梦想生活圈当你以自己为出发点时你会发现每个人无时无刻都生活在一…
-
珠宝首饰毕业设计说明
韵妃回忆旧时的复古美设计说明书摘要随着大量时尚零售商将高端潮流服饰普及推广到大众生活中时尚已逐渐变得千人一面复古风潮则提供了一个真…
-
珠宝抛光机设计说明书
目录第1章绪论111研制背景及意义112抛光机的研究现状和发展趋势213研究内容3第2章珠宝抛光机总体方案设计421方案选择422…
-
珠宝展厅设计说明
珠宝展厅设计说明以简洁现代的手法诠释珠宝店的高贵气质天花的造型使整个空间变的更加连贯独特特点风格统一不拘一格珠宝首饰店在装饰上追求…
-
珠宝开店设计方案
无机材料课程设计院系勘查与测绘工程学院班级宝石1041姓名李猛学号1001451132指导教师日期20xx年1月4日珠宝投资经营方…
-
服装店设计说明
服装店设计说明姓名陈清涛学号20xx253035班级09装潢A班题目服装店设计指导老师张亚欧对于服装店来说装修风格到位就是成功的一…
-
室内设计说明
室内设计说明随着生活质量不断提高人们对赖以生存的环境开始重新考虑并由此提出了更高层次的要求持别是生活水平和文化素质的提高和住宅条件…
-
首饰毕业设计说明
网中国纹样首饰设计说明书摘要网存在于有形与无形有形如渔网蛛网无形如家梦想生活圈当你以自己为出发点时你会发现每个人无时无刻都生活在一…
-
珠宝首饰毕业设计说明
韵妃回忆旧时的复古美设计说明书摘要随着大量时尚零售商将高端潮流服饰普及推广到大众生活中时尚已逐渐变得千人一面复古风潮则提供了一个真…
-
配件首饰项目可行性研究报告评审方案设计(20xx年发改委立项详细标准+甲级案例范文)
配件首饰项目可行性研究报告评审方案设计20xx年发改委立项详细标准甲级案例范文编制机构博思远略咨询公司360投资情报研究中心研究思…
-
如何设计欧式珠宝箱项目可行性研究报告评审方案(20xx年发改委立项详细标准及甲级案例范文)
360市场研究网如何设计欧式珠宝箱项目可行性研究报告评审方案20xx年发改委立项详细标准及甲级案例范文编制机构博思远略咨询公司36…