北航自控实验实验报告模板(1)
成绩
北 京 航 空 航 天 大 学
自动控制原理实验报告

学 院
专业方向
班 级
学 号
学生姓名
指导教师
自动控制与测试教学实验中心
实验一 一、二阶系统的电子模拟及时域响应的动态测试
实验时间 2014.10.28 实验编号 35 同组同学 无
一、实验目的
了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系;
学习在电子模拟机上建立典型环节系统模型的方法;
学习阶跃响应的测试方法。
二、实验内容
建立一阶系统的电子模型,观测并记录在不同时间常数T时的阶跃响应曲线,并测定其过渡过程时间Ts;
建立二阶系统的电子模型,观测并记录在不同阻尼比时的阶跃响应曲线,并测定其超调量及过渡过程时间。
三、实验原理
1.一阶系统
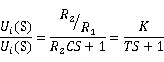
系统传递函数为:φ(s)=
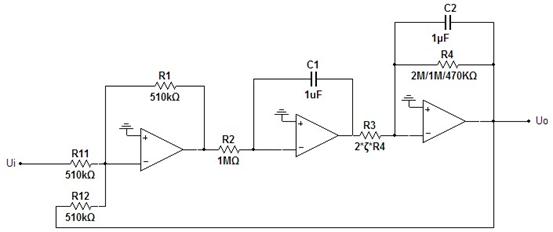
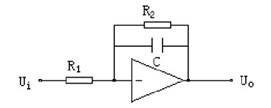
模拟运算电路如图1- 1所示:

图 1- 1
由图 1-1得 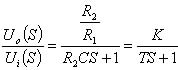
在实验当中始终取R2= R1,则K=1,T= R2C取不同的时间常数T分别为: 0.25、 0.5、1 。
2.二阶系统
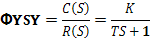
其传递函数为:
令ωn=1弧度/秒,则系统结构如图1-2所示:

图1-2
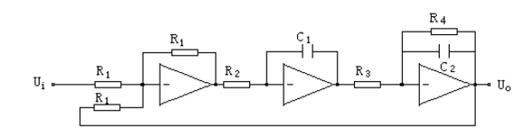
根据结构图,建立的二阶系统模拟线路如图1-3所示:

图1-3
取R2C1=1 ,R3C2 =1,则 及
及 
ζ取不同的值ζ=0.25 , ζ=0.5 , ζ=1
实验电路图
一阶:

二阶:
四、实验步骤
1熟悉HHMN-1型电子模拟机的使用方法,将各运算放大器接成比例器,通电调零;
2断开电源,按照实验说明书上的条件和要求,计算电阻和电容的取值,按照模拟线路图搭接线路,不用的运算放大器接成比例器;
3将D/A1与系统输入端Ui连接,将A/D1与系统输出端Uo连接;
4在windows XP桌面用鼠标双击MATLAB图标后进入,在命令行键入autolab,进入实验软件系统;
5在系统菜单中选择实验项目,选择实验一,在窗口左侧选择“实验模型”;
6观测实验结果,记录实验数据,绘制实验结果图,填写实验数据表格,完成实验报告。
五、实验结果
1、一阶系统:
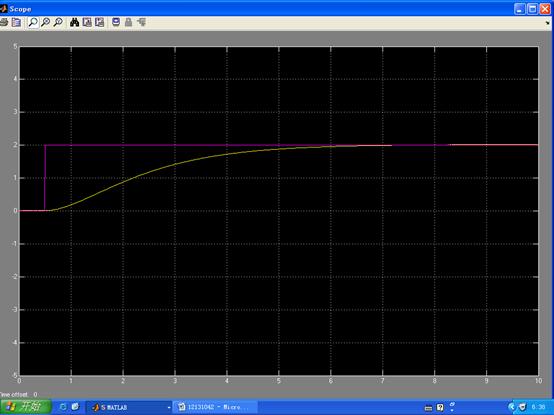
实验结果图:
T=0.25:

T=0.5:

T=1:


误差计算:
T=0.25时:u=(0.6015-0.75)/0.75×100%=19.86%
T=0.5时:u=(1.6170-1.5)/1.5×100%=7.8%
T=1.0时:u=(3.228-3)/3×100%=7.6%
2、二阶系统:
实验结果图:

ζ=0.5

ζ=0.707
ζ=1.0

误差计算:
ζ=0.5时: u(Ts)=(8.735-7)/7×100%=24.7%
ζ=0.707时: u(Ts)=(5.4275-4.95)/4.95 × 100%=9.49%
ζ=1时: u(Ts)=(4.857-4.75)/4.75 × 100%=2.25%
六、结果分析
1、实验一中取的C和R2的乘积并不准确等于T的值,实验二中取得C2和R4也不能准确使得ζ取得理论值,所以在试验元件的数值设置上存在误差;
2、实验设备经过多次使用,可能电阻和电容已经不是标的准确值了,会导致我们的实验有误差;
3、在计算的时候,由于没有准确抓点,通过目测误差带5%对应的时间,这样会造成实验所得数据与理论数据之间存在偏差。
七、收获、体会及建议
感觉老是讲的很细心,所以不是很难,非常顺利的就做完了,学习了很多自控的知识,初步了解了自控实验的做法和系统搭建的流程等等,收获不小
第二篇:北航自控原理实验报告
自动控制原理实验报告
12231034 姜峰
一、实验名称:
一、二阶系统的电子模拟及时域响应的动态测试
二、实验目的
1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系
2、学习在电子模拟机上建立典型环节系统模型的方法
三、实验内容
1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间Ts
2、建立二阶系统电子模型,观测并记录不同阻尼比 的响应曲线,并测定超调量
的响应曲线,并测定超调量 及过渡过程时间Ts
及过渡过程时间Ts
四、实验原理及实验数据
1.一阶系统
①实验原理
系统传递函数:
由电路图可得,
取
则K=1
分别取
T=0.25, 0.5, 1
②实验数据图表
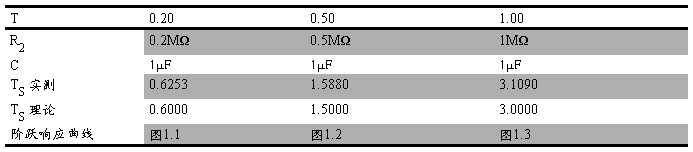
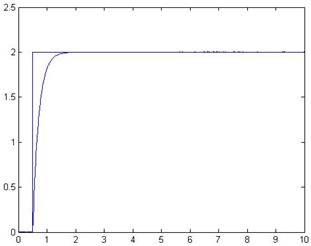

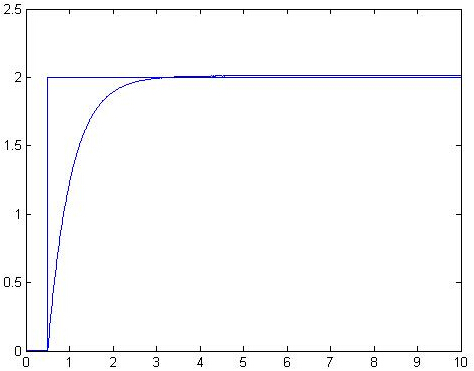 图1.1
图1.1
图1.2

图1.3
③误差计算与分析
误差计算
当T=0.2时
当T=0.5时
当T=1.0时
误差分析
由于T决定响应参数,
而
在实验中R、C的取值上可能存在一定误差。
另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。
④实验结果说明
由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。
2.二阶系统
①实验原理
系统传递函数

令

二阶系统模拟线路
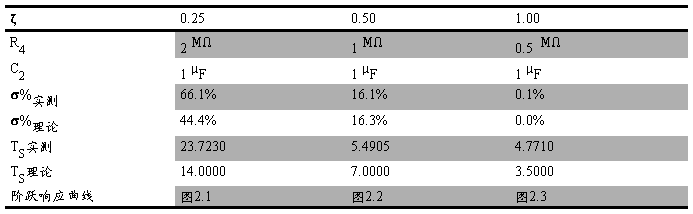
②实验数据
③实验曲线
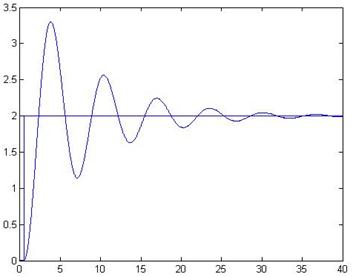
图2.1
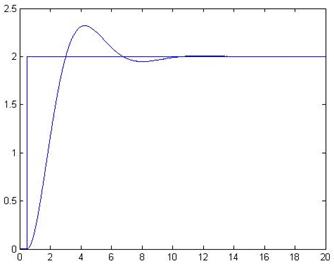
图2.2

图2.3
④误差计算及分析
误差计算
当ξ=0.25时


当ξ=0.50时


当ξ=1.00时


误差分析
由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。
⑤实验结果说明
由本实验可以看出,当ωn一定时,超调量随着ξ的增加而减小,直到ξ达到某个值时没有了超调;而调节时间随ξ的增大,先减小,直到ξ达到某个值后又增大了。
经理论计算可知,当ξ=0.707时,调节时间最短,而此时的超调量也小于5%,此时的ξ为最佳阻尼比。此实验的ξ分布在0.707两侧,体现了超调量和调节时间随ξ的变化而变化的过程,达到了预期的效果。
-
北航自控实验报告6
3902自控实验六状态反馈与状态观测器一实验目的1掌握用状态反馈进行极点配置的方法2了解带有状态观测器的状态反馈系统二实验原理1闭…
-
北航自动控制原理实验报告
成绩北京航空航天大学自动控制原理实验报告学院能源与动力工程学院专业方向飞行器动力工程班级1204学号学生姓名指导教师自动控制与测试…
-
北航自控实验实验报告模板(1)
成绩北京航空航天大学自动控制原理实验报告学院专业方向班级学号学生姓名指导教师自动控制与测试教学实验中心自动控制原理实验报告实验一一…
-
北航自动控制实验一20xx最新最全报告
成绩自动控制原理实验报告频率响应测试学院自动化科学与电气工程学院专业方向测试与控制班级xxx学号xxx学生姓名雷泽阳指导教师张军香…
-
北航自控实验报告2
成绩北京航空航天大学自动控制原理实验报告班级120xx8学号120xx191学生姓名黄钟胤自动控制与测试教学实验中心自动控制原理实…
-
北航自动化学院计算机控制系统实验报告
20xx20xx学年第二学期计算机控制实验报告班级学院高等工程姓名李柏学号20xx年6月12日实验1模拟式小功率随动系统的实验调试…
-
北航工光实验报告
物理光学实验报告班级班实验一组合干涉仪一实验目的通过本实验观察干涉现象了解干涉原理学会干涉光路的搭构与调整通过干涉环的变化与被测量…
-
北航自控实验报告2
成绩北京航空航天大学自动控制原理实验报告班级120xx8学号120xx191学生姓名黄钟胤自动控制与测试教学实验中心自动控制原理实…
- 北航计软实验报告实验一
-
北航惯性导航综合实验一实验报告
实验一陀螺仪关键参数测试与分析实验加速度计关键参数测试与分析实验二零一三年五月十二日1实验一陀螺仪关键参数测试与分析实验一实验目的…
- 自动绕线机实验报告_控制流程图