北航自控实验报告6
自控实验六:状态反馈与状态观测器
一.实验目的
1. 掌握用状态反馈进行极点配置的方法。
2. 了解带有状态观测器的状态反馈系统。
二.实验原理
1. 闭环系统的动态性能与系统的特征根密切相关,在状态空间的分析中可利用状态反馈来配置系统的闭环极点。这种校正手段能提供更多的校正信息,在形成最优控制率、抑制或消除扰动影响、实现系统解耦等方面获得广泛应用。在改善与提高系统性能时不增加系统零、极点,所以不改变系统阶数,实现方便。
2. 已知线形定常系统的状态方程为 为了实现状态反馈,需要状态变量的测量值,而在工程中,并不是状态变量都能测量到,而一般只有输出可测,因此希望利用系统的输入输出量构成对系统状态变量的估计。解决的方法是用计算机构成一个与实际系统具有同样动态方程的模拟系统,用模拟系统的状态向量
为了实现状态反馈,需要状态变量的测量值,而在工程中,并不是状态变量都能测量到,而一般只有输出可测,因此希望利用系统的输入输出量构成对系统状态变量的估计。解决的方法是用计算机构成一个与实际系统具有同样动态方程的模拟系统,用模拟系统的状态向量 作为系统状态向量
作为系统状态向量 的估值。状态观测器的状态和原系统的状态之间存在着误差,而引起误差的原因之一是无法使状态观测器的初态等于原系统的初态。引进输出误差
的估值。状态观测器的状态和原系统的状态之间存在着误差,而引起误差的原因之一是无法使状态观测器的初态等于原系统的初态。引进输出误差 的反馈是为了使状态估计误差尽可能快地衰减到零。状态估计的误差方程为
的反馈是为了使状态估计误差尽可能快地衰减到零。状态估计的误差方程为

误差衰减速度,取决于矩阵(A-HC)的特征值。
3. 若系统是可控可观的,则可按极点配置的需要选择反馈增益阵k,然后按观测器的动态要求选择H,H的选择并不影响配置好的闭环传递函数的极点。因此系统的极点配置和观测器的设计可分开进行,这个原理称为分离定理。
三.实验内容
被控对象传递函数为
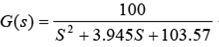
写成状态方程形式为
式中

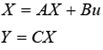
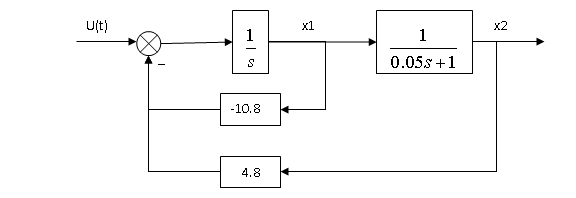
模拟电路图如6.2图所示。
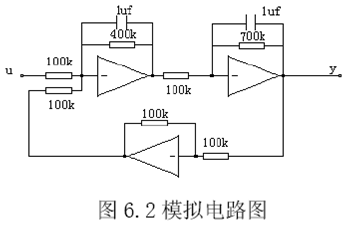
带有状态观测器的状态反馈系统方框图如6.3图所示。
四.实验数据及图像记录
A.图6.1系统状态空间表达式如下:
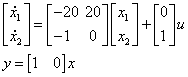
设计状态反馈矩阵为k=[4.8 -10..8]
则加入状态反馈的系统结构图
B.为给定系统配置状态观测器
系统模拟运算电路图如下:
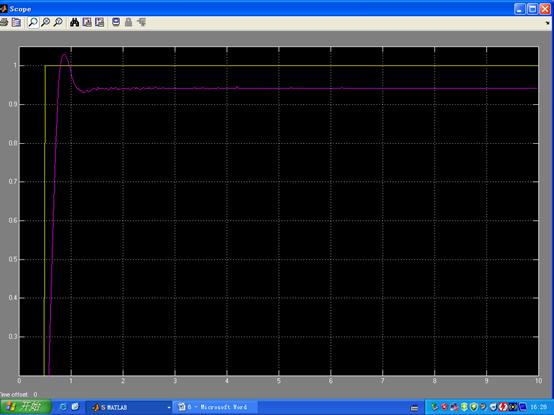
T=0.01 不接入观测窗
接入观测窗

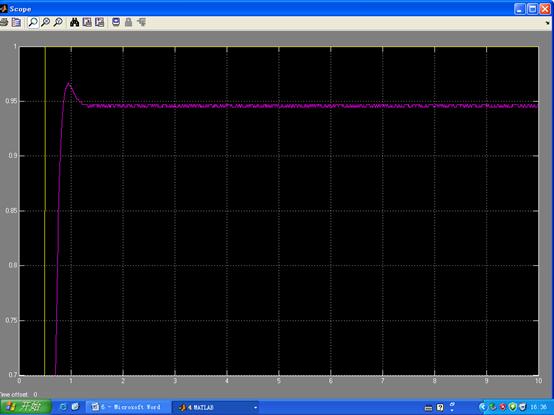
T=0.02
不接入观测窗
接入观测窗
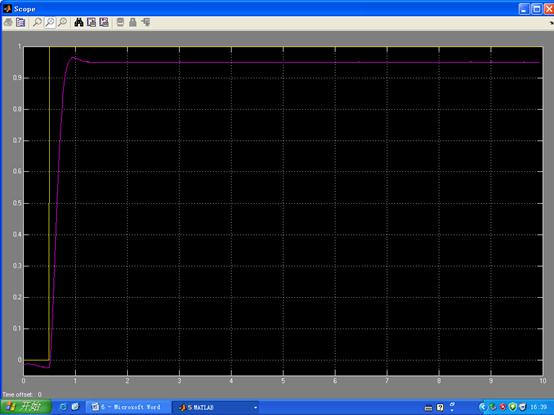
T=0.01,极点0.2
不接入观测窗

接入观测窗
T=0.02极点0.2
不接入观测窗

接入观测窗

T=0.01极点0.3
不接入观测窗

接入观测窗
T=0.02极点0.3
不接入观测窗

接入观测窗

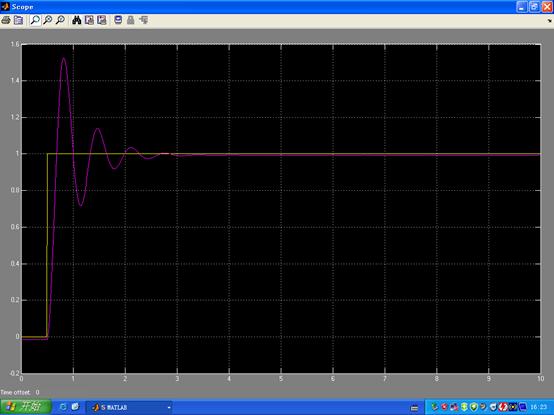
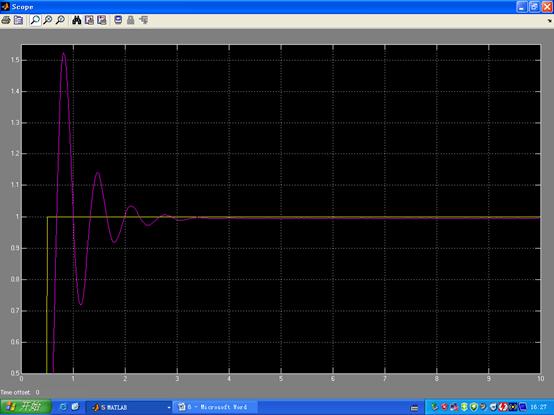
通过上图可得,加观测器后,系统快速性提高,系统的稳定时间变小,稳定性显著提高。观测数据跟实际输出基本吻合。
所加观测窗参数为: X=AX+Bu,Y=CX
式中 


对应系统极点 ,
, ,对应在z平面上为
,对应在z平面上为  ,
,
3.数据分析:
如果系统的初始状态x(0),可以通过一个有限的时间间隔,由输出序列y(0),y(T),y(2T),…y[(n-1)T]唯一地确定,则称系统的状态是完全可观测的。
采样系统状态可观测得充要条件是:可观测性阵的秩为满秩,即

采样系统完全可控的充要条件是:可控性阵为满秩,即rank[B AB …  B ]=n
B ]=n
本实验中,n=2,C=[100 0],


有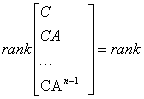

 ,所以实验系统是完全可观测的;
,所以实验系统是完全可观测的;
rank[B AB … ] =  ,所以实验系统是完全可控的。
,所以实验系统是完全可控的。
五、实验总结:
为系统配置极点:  ,
, 14.7
14.7  110.3,而
110.3,而 =3.945,
=3.945, =103.57
=103.57  ,同时Kr作调整。
,同时Kr作调整。
观测器的期望值为Z1,2=0.1 则S1,2=
则S1,2= =-0.82。
=-0.82。
特征方程为 =0 所以
=0 所以 =1.64
=1.64  =0.67
=0.67
W= R=
R=
WR=
 =
=
H= =
= =
=
综上,可得反馈增益矩阵为
观测器增益矩阵为H=
六.实验结论
1时间、温度等因素会导致电容电阻值的变化,从而产生误差。
2在将模拟量转化为数字量的过程中会有误差,即A/D D/A误差。
3电容放电不彻底会对系统的阶跃响应造成影响。
4 MATLAB作为一种绘图工具,对工程中分析结构模型有很大的帮助。
5加观测器后,系统快速性提高,系统的稳定时间变小,稳定性显著提高。实验过程中观测数据跟实际输出基本吻合。即系统加状态观测器后,可以增加系统的稳定性,减小系统的超调量和调节时间。
第二篇:北航微机原理实验报告4
微机原理实验报告(4)
一、实验名称
数/模转换
二、实验目的
了解数/模转换的原理,学习数/模转换芯片的使用方法,掌握利用数/模转换芯片产生方波及正弦波的方法。
三、实验内容
在数据段中存放好对应于方波和正弦波的数字量,正弦波要求20个值。
编写程序将数据段中的数字量送到DAC0832的输出端产生方波和正弦波。
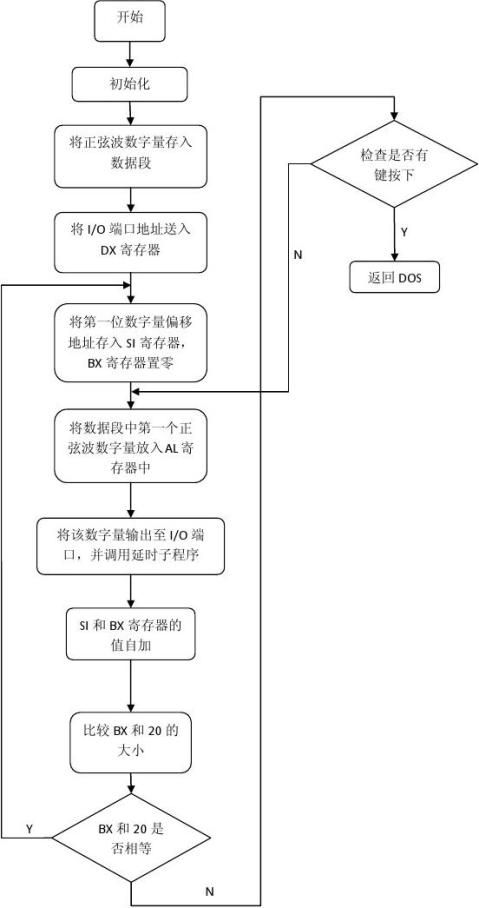
四、程序流程图及波形图:(见末页)
五、实验结论:
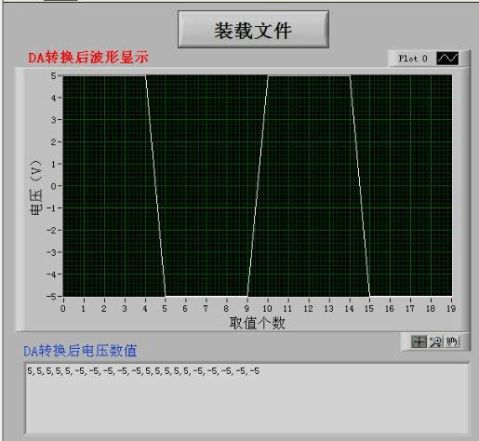
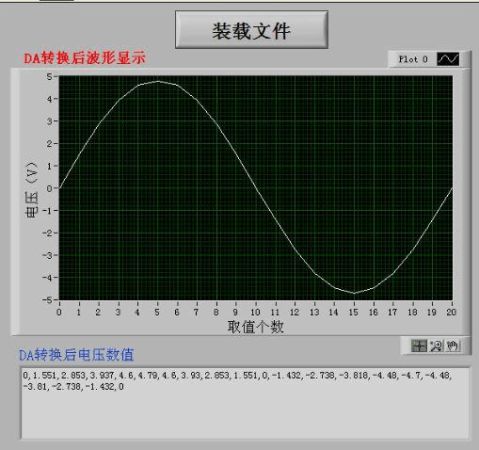
符合预期,输出端输出的数据加载到虚拟示波器后显示方波和正弦波。
六、实验心得
这次实验无论是从程序编写到硬件连线,都是比较容易的。在实验过程中,我也进行得十分顺利,很快就得到了实验结果。但实验过程中的一个环节还是给了我一些启示。实验过程中有一个步骤是要在输出端测输出电压。刚开始我测试数据的时候发现万用表测出的数据跳动非常大,无法获得稳定的电压值。我开始认为是连线接触不良导致的这种情况,于是重新连了一次线,但发现问题仍然存在。我又重新检查了一下程序,并回忆老师上课讲过的一些实验中会遇到的问题,我突然想到是因为程序中少了一段延时程序才导致输出电压无法测出。再加入了一个延时子程序后果然顺利的得到了稳定的电压值。这次实验我最大的收获就是明白了理论如何转化成正确的实践成果。老师课堂上并没有讲过输出要延时一段时间,但是具体实践却要求我们必须这样做才能获得正确的结果。这就需要我们自己具备这种分析问题,并结合实际情况改进理论指导的能力。
七、实验程序:
方波:
inadress equ 0EF00H-280H+290H
STACK SEGMENT STACK
DB 100 DUP (?)
STACK ENDS
DATA SEGMENT
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE, DS: DATA, SS:STACK
DELAY PROC
MOV CX, 0
MOV BX, 8000
NEXT: LOOP NEXT
DEC BX
JNZ NEXT
RET
DELAY ENDP
MAIN PROC
AGN: MOV AX, DATA
MOV DS, AX
MOV AL, 0
MOV DX, inadress
OUT DX, AL
CALL DELAY
MOV AL, 0FFH
OUT DX, AL
CALL DELAY
MOV DL, 0FFH
MOV AH, 6
INT 21H
JZ AGN
MOV AH, 4CH
INT 21H
MAIN ENDP
CODE ENDS
END MAIN
正弦波:
inadress equ 0EF00H-280H+290H
STACK SEGMENT stack
DB 100 DUP (?)
STACK ENDS
DATA SEGMENT
STR DB 128, 168, 203, 232, 250, 255, 250, 232, 203, 168, 128, 88, 53, 24, 6, 0, 6, 24, 53, 88 DATA ENDS
CODE SEGMENT
ASSUME CS:CODE, DS: DATA, SS:STACK
DELAY NEXT: DELAY
MAIN NEXT1: NEXT2: MAIN CODE
PROC MOV CX, 0 MOV BX, 8000 LOOP NEXT DEC BX JNZ NEXT RET ENDP PROC MOV MOV MOV MOV MOV MOV OUT CALL INC INC CMP JE MOV MOV INT JZ AX, DATA DS, AX DX, inadress SI, OFFSET STR BX, 0 AL, [SI] DX, AL DELAY SI BX BX, 20 NEXT1 DL, 0FFH AH, 6 21H NEXT2 MOV AH, 4CH INT 21H ENDP ENDS END MAIN
流程图:
方波

正弦波:
方波:
正弦波:
-
北航自控实验报告6
3902自控实验六状态反馈与状态观测器一实验目的1掌握用状态反馈进行极点配置的方法2了解带有状态观测器的状态反馈系统二实验原理1闭…
-
北航自动控制原理实验报告
成绩北京航空航天大学自动控制原理实验报告学院能源与动力工程学院专业方向飞行器动力工程班级1204学号学生姓名指导教师自动控制与测试…
-
北航自控实验实验报告模板(1)
成绩北京航空航天大学自动控制原理实验报告学院专业方向班级学号学生姓名指导教师自动控制与测试教学实验中心自动控制原理实验报告实验一一…
-
北航自动控制实验一20xx最新最全报告
成绩自动控制原理实验报告频率响应测试学院自动化科学与电气工程学院专业方向测试与控制班级xxx学号xxx学生姓名雷泽阳指导教师张军香…
-
北航自控实验报告2
成绩北京航空航天大学自动控制原理实验报告班级120xx8学号120xx191学生姓名黄钟胤自动控制与测试教学实验中心自动控制原理实…
-
北航自动化学院计算机控制系统实验报告
20xx20xx学年第二学期计算机控制实验报告班级学院高等工程姓名李柏学号20xx年6月12日实验1模拟式小功率随动系统的实验调试…
-
北航工光实验报告
物理光学实验报告班级班实验一组合干涉仪一实验目的通过本实验观察干涉现象了解干涉原理学会干涉光路的搭构与调整通过干涉环的变化与被测量…
-
北航自控实验报告2
成绩北京航空航天大学自动控制原理实验报告班级120xx8学号120xx191学生姓名黄钟胤自动控制与测试教学实验中心自动控制原理实…
- 北航计软实验报告实验一
-
北航惯性导航综合实验一实验报告
实验一陀螺仪关键参数测试与分析实验加速度计关键参数测试与分析实验二零一三年五月十二日1实验一陀螺仪关键参数测试与分析实验一实验目的…