实验一_系统响应及系统稳定性实验报告
实验一 系统响应及系统稳定性
一、实验目的
(1)掌握求系统响应的方法
(2)掌握时域离散系统的时域特性
(3)分析、观察及检验系统的稳定性
二、实验原理与方法
在时域中,描写系统特性的方法是差分方程和单位脉冲响应。已知输入信号, 可以由差分方程、单位脉冲响应或系统函数求出系统对于该输入信号的响应,本实验仅在时域求解。在计算机上适合用递推法求差分方程的解,最简单的方法是采用MATLAB语言的工具箱函数filter函数。也可以用MATLAB语言的工具箱函数conv函数计算输入信号和系统的单位脉冲响应的线性卷积,求出系统的响应。
系统的稳定性是指对任意有界的输入信号,系统都能得到有界的系统响应。或者系统的单位脉冲响应满足绝对可和的条件。系统的稳定性由其差分方程的系数决定。实际中检查系统是否稳定,不可能检查系统对所有有界的输入信号,输出是否都是有界输出,或者检查系统的单位脉冲响应满足绝对可和的条件。可行的方法是在系统的输入端加入单位阶跃序列,如果系统的输出趋近一个常数(包括零),就可以断定系统是稳定的。系统的稳态输出是指当n→∞时,系统的输出。如果系统稳定,信号加入系统后,系统输出的开始一段称为暂态效应,随n的加大,幅度趋于稳定,达到稳态输出。注意在以下实验中均假设系统的初始状态为零。
二、实验内容及步骤
实验内容(1)
A=[1,-0.9];B=[0.05,0.05]; %系统差分方程系数向量B和A
x1n=[1 1 1 1 1 1 1 1 zeros(1,50)]; %产生信号x1(n)=R8(n) x2n=ones(1,128); %产生信号x2(n)=u(n)
hn=impz(B,A,58); %求系统单位脉冲响应h(n)
subplot(2,2,1);stem(hn,'.'); %调用函数tstem绘图 title('(a) 系统单位脉冲响应h(n)');box on
y1n=filter(B,A,x1n); %求系统对x1(n)的响应y1(n)
subplot(2,2,2);stem(y1n,'.');
title('(b) 系统对R8(n)的响应y1(n)');box on
y2n=filter(B,A,x2n); %求系统对x2(n)的响应y2(n)
subplot(2,2,4);stem(y2n);
title('(c) 系统对u(n)的响应y2(n)');box on
输出波形

实验内容(2)
x1n=[1 1 1 1 1 1 1 1 ]; %产生信号x1(n)=R8(n)
h1n=[ones(1,10) zeros(1,10)];
h2n=[1 2.5 2.5 1 zeros(1,10)];
y21n=conv(h1n,x1n);
y22n=conv(h2n,x1n);
figure(2)
subplot(2,2,1);stem(h1n,'.'); %调用函数tstem绘图 title('(d) 系统单位脉冲响应h1(n)');box on
subplot(2,2,2);;stem(y21n,'.');
title('(e) h1(n)与R8(n)的卷积y21(n)');box on
subplot(2,2,3);stem(h2n,'.'); %调用函数tstem绘图 title('(f) 系统单位脉冲响应h2(n)');box on
subplot(2,2,4);stem(y22n,'.');
title('(g) h2(n)与R8(n)的卷积y22(n)');box on

实验内容(3)
un=ones(1,256); %产生信号u(n)
n=0:255;
xsin=sin(0.014*n)+sin(0.4*n); %产生正弦信号
A=[1,-1.8237,0.9801];B=[1/100.49,0,-1/100.49]; %系统差分方程系数向量B和A
y31n=filter(B,A,un); %谐振器对u(n)的响应y31(n)
y32n=filter(B,A,xsin); %谐振器对u(n)的响应y31(n) figure(3)
subplot(2,1,1);stem(y31n,'.');
title('(h) 谐振器对u(n)的响应y31(n)');box on
subplot(2,1,2);stem(y32n,'.');
title('(i) 谐振器对正弦信号的响应y32(n)');box on

四、实验结果分析
由各实验结果的截图可看出,每个图都直观地反映了我们想要求得的单位脉冲响应、给定信号作用后的输出响应,都符合预期结果。
五、思考题
(1)如果输入信号为无限长序列,系统的单位脉冲响应是有限长序列,可否用线性卷积法求系统的响应?如何求?
答:可以。把输入信号进行分段,分别进行卷积,最后将各段卷积结果相加即可。
(2)如果信号经过低通滤波器,把信号的高频分量滤掉,时域信号会有何变化? 用前面第一个实验结果进行分析说明。
答:时域信号的剧烈变化将被平滑,由实验内容(1)的内容可见,经过系统的低通滤波使输入信号和输出的阶跃变化变得缓慢上升与下降。
六、实验心得及体会
通过本次实验我重新温习了MATLAB这个软件的基本使用方法,运行环境。通过这款软件使我们的学习更加方便。
实验中,我学会了filter和conv函数的基本用法,前者可计算输入信号的前提下求解输出响应的序列,后者则可通过输入信号和系统的单位脉冲响应的线性卷积,求出系统的响应。
第二篇:实验三 系统稳定性的研究的实验报告-何永强
系统稳定性的
研究的
实验 报
告
学院:机械工程学院
班级:09级过控(2)班
姓名:周军
学号:12009240361
实验三 系统稳定性的研究
一. 目的要求
1. 验证自动控制系统中:增加开环放大系数使系统的震荡加剧,以致于不稳定。
2. 控制系统中时间常数错开,可以提高系统的临界稳定放大倍数。
二. 实验仪器、设备、工具及材料

三. 实验原理和设计
应用模拟电路来模拟典型三阶系统。
线性控制系统稳定的重要条件是:他的微分方程式的特征方程的根都是负实数的复数,亦及:全部根都位于S复平面的左半面。
WK(S) =  =
= (Kɑ )
(Kɑ )
其闭环特征方程式为:
T1T2T3S 3+(T1T3+T1T2+T2T3)S 2+(T1+T2+T3)S+K+1=0
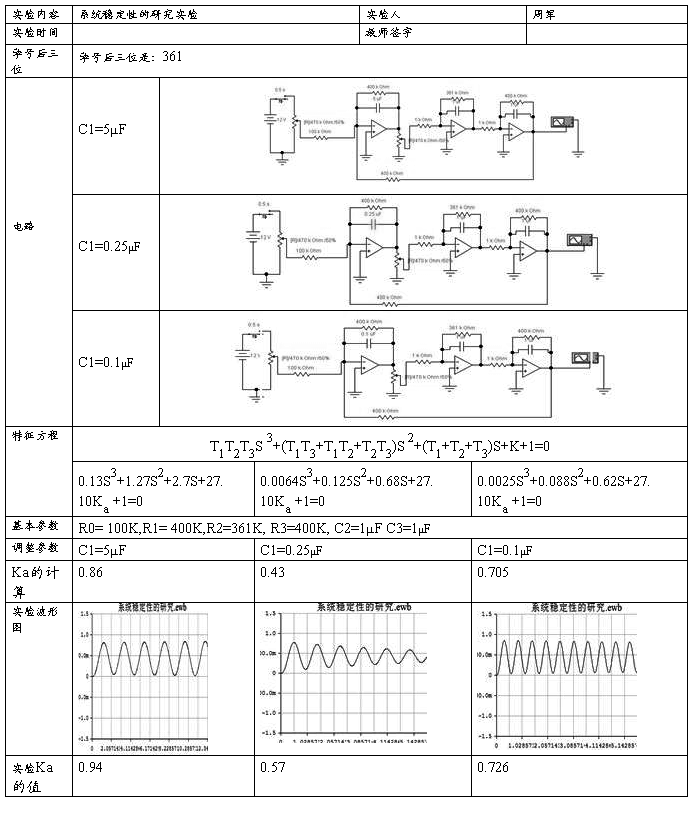
四. 实验内容和步骤
在下列各组参数下,调节Kɑ,观察阶跃响应;求出系统临界稳定之Kɑ值。
① R1=400K,C1=5µF,R2=361K,C2=1µF,R3=400K,C3=1µF。
② C1=0.25µF,R1、R2、R3、C2、C3同①。
③C1=0.1µF, R1、R2、R3、C2、C3同①。
系统方框图如图1所示

图6-1 系统方框图
系统接线图如图6-2所示:

图6-2 系统模拟接线图
由于学号后三位是:361,所以将在下列计算中运用到:



K1=R1/R3=3.61 K3=R3/R03=3.61 
系统稳定性的电路图如下所示:
① R1=400K,C1=5µF,R2=361K,C2=1µF,R3=400K,C3=1µF,Ro=100K
T1=R1C1=361*5*10^-3=1.805
T2=R2C2=5*10*10^-3=0.05
T3=R3C3=361*10^-3=0.361
带入b)中数据闭环传递函数得:
0.13S 3+1.26S 2+2.6S+27.12Ka +1=0或S 3+9.15S 2+19.25S+193.3Ka+7.6=0
由劳斯判据可求出系统稳定的开环增益:
s3 1 19.25
s2 9.12 193.3Ka+7.6
s1 175.56-193.3Ka+7.6/9.12 0
s0 193.3Ka+7.6
由
得到系统稳定范围 -0.037<Ka<0.87
若要使系统稳定,则
由 9.15×19.28-193.6Ka-7.2=0
得到系统临界稳定时Ka=0.87
2)当参数设置为① R1=400K,C1=0.25µF,R2=361K,C2=1µF,R3=400K,C3=1µF时
T1=R1C1=361*0.25*10^-3=0.09
T2=R2C2=150*10^-3=0.15
T3=R3C3=361*10^-3=0.361
带入b)中数据得其闭环传递函数:0.0066S 3+0.124S 2+0.68S+27.10Ka +1=0或
S 3+18.38S 2+100S+3985.29Ka +147.06=0
由劳斯判定可求出系统稳定的开环增益:
s3 1 100
s2 18.51 4025.37Ka+149.25
s1  0
0
s0 3985.29Ka+147.06
若要使系统稳定,则
由 18.38×100-3985.29Ka-147.06=0
得到系统临界稳定时Ka=0.42
3)当参数设置为① R1=400K,C1=0.1µF,R2=361K,C2=1µF,R3=400K,C3=1µF时
T1=R1C1=361*0.25*10^-3=0.09
T2=R2C2=150*10^-3=0.15
T3=R3C3=361*10^-3=0.361
带入b)中数据得其闭环传递函数:0.0025 S 3+0.089S 2+0.62S+27.10Ka +1=0或
S 3+32.59S 2+229.6S+10037.04Ka +370.4=0
由劳斯判定可求出系统稳定的开环增益:
s3 1 229.6
s2 32.59 10037.04Ka+370.4
s1  0
0
s0 10037.04Ka+370.4
若要使系统稳定,则
由 32.59×229.6-10037.04Ka-370.4=0
得到系统临界稳定时Ka=0.708.
五. 结论与思考;
1. 由实测中所得临界稳定之Kɑ值是否与劳斯判据所计算值相同?
答:由于实验过程中存在着误差,如数据计算取值时结果的估算,所以实验中所得临界稳定之Ka值与劳斯判据所计算值之间存在偏差。
2.改变电容C1的值,临界放大系数有什么变化?试说明其变化理由。
答:改变电容C1,发现系统的稳定性会有所变化,但临界放大系数K与C1的取值无关,由于 K=K1K2K3Ka;所以C1的改变对K没有影响。
六.实验结论:
系统的稳定性只与系统固有特性有关,而与外界因素无关,取决与外界因素消失后暂态分量的衰减量,暂态分量的衰减量决定于系统闭环传递函数的特征根在S平面的分布:若所有特征根都分布于S平面的左侧,则系统式稳定的;若有特征根在S平面虚轴上,则系统处于临界状态;若所有特征根都在S平面的右侧,则系统是不稳定的。所以系统稳定的条件是:系统的闭环传递函数的特征方程的根都位于S平面的左侧。
七.实验总结报告
报告内容应包括你所设计的实验方案的理论依据,实验测定的方法,原始数据及数据处理结果,并对实验结果进行讨论。
1. 绘制实验记录
2. 实验结果分析、体会和建议。
实验数据记录单:
-
实验一_系统响应及系统稳定性实验报告
一实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察及检验系统的稳定性二实验原理与方法在时域中描写系统特性的方法…
-
实验一:系统响应及系统稳定性
实验一系统响应及系统稳定性1实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察及检验系统的稳定性2实验原理与方法…
-
数字信号处理系统响应及系统稳定性实验报告
实验项目名称系统响应及系统稳应用FFT对信号进行频谱分析班级应用电子技术教育专业一班姓名学号实验一系统响应及系统稳定性一实验目的1…
-
实验一_系统响应及系统稳定性实验报告
山东建筑大学实验报告学院信息与电气工程学院班级电信112姓名学号课程实验日期年月日成绩实验一系统响应及系统稳定性一实验目的1掌握求…
-
数字信号处理实验一 系统响应及系统稳定性
实验一系统响应及系统稳定性一实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察及检验系统的稳定性二实验原理与方法…
-
自控实验报告2-时域系统分析和线性系统的稳定性研究
实验2时域系统分析和线性系统的稳定性研究1研究性教学目的学习二阶系统阶跃响应曲线的实验测试方法研究二阶系统的两个重要参数n对阶跃瞬…
- 中南大学典型系统的时域响应和稳定性分析实验报告
-
实验一_系统响应及系统稳定性实验报告
一实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察及检验系统的稳定性二实验原理与方法在时域中描写系统特性的方法…
-
实验1 系统响应及系统稳定性(matlab实验用程序)
1使用filter函数求响应A109B005005x1n11111111zeros160x2nones1150hnimpzBA60…
-
实验一 系统响应及系统稳定性
第十章上机实验数字信号处理实验报告实验一系统响应及系统稳定性1实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察…
-
稳定性试验报告范文
摘要xxx是研究其稳定性是在考察其在温度湿度光线的影响下随时间变化的规律为其生产包装贮存运输条件和有效期的确定提供科学依据本试验采…