实验三 系统稳定性的研究的实验报告-何永强
系统稳定性的
研究的
实验 报
告
学院:机械工程学院
班级:09级过控(2)班
姓名:周军
学号:12009240361
实验三 系统稳定性的研究
一. 目的要求
1. 验证自动控制系统中:增加开环放大系数使系统的震荡加剧,以致于不稳定。
2. 控制系统中时间常数错开,可以提高系统的临界稳定放大倍数。
二. 实验仪器、设备、工具及材料

三. 实验原理和设计
应用模拟电路来模拟典型三阶系统。
线性控制系统稳定的重要条件是:他的微分方程式的特征方程的根都是负实数的复数,亦及:全部根都位于S复平面的左半面。
WK(S) =  =
= (Kɑ )
(Kɑ )
其闭环特征方程式为:
T1T2T3S 3+(T1T3+T1T2+T2T3)S 2+(T1+T2+T3)S+K+1=0
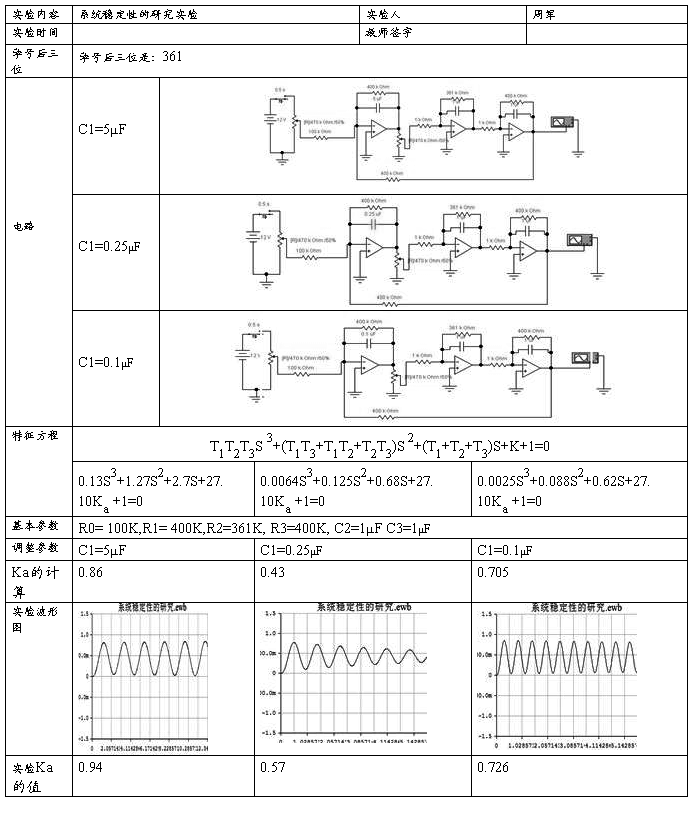
四. 实验内容和步骤
在下列各组参数下,调节Kɑ,观察阶跃响应;求出系统临界稳定之Kɑ值。
① R1=400K,C1=5µF,R2=361K,C2=1µF,R3=400K,C3=1µF。
② C1=0.25µF,R1、R2、R3、C2、C3同①。
③C1=0.1µF, R1、R2、R3、C2、C3同①。
系统方框图如图1所示

图6-1 系统方框图
系统接线图如图6-2所示:

图6-2 系统模拟接线图
由于学号后三位是:361,所以将在下列计算中运用到:



K1=R1/R3=3.61 K3=R3/R03=3.61 
系统稳定性的电路图如下所示:
① R1=400K,C1=5µF,R2=361K,C2=1µF,R3=400K,C3=1µF,Ro=100K
T1=R1C1=361*5*10^-3=1.805
T2=R2C2=5*10*10^-3=0.05
T3=R3C3=361*10^-3=0.361
带入b)中数据闭环传递函数得:
0.13S 3+1.26S 2+2.6S+27.12Ka +1=0或S 3+9.15S 2+19.25S+193.3Ka+7.6=0
由劳斯判据可求出系统稳定的开环增益:
s3 1 19.25
s2 9.12 193.3Ka+7.6
s1 175.56-193.3Ka+7.6/9.12 0
s0 193.3Ka+7.6
由
得到系统稳定范围 -0.037<Ka<0.87
若要使系统稳定,则
由 9.15×19.28-193.6Ka-7.2=0
得到系统临界稳定时Ka=0.87
2)当参数设置为① R1=400K,C1=0.25µF,R2=361K,C2=1µF,R3=400K,C3=1µF时
T1=R1C1=361*0.25*10^-3=0.09
T2=R2C2=150*10^-3=0.15
T3=R3C3=361*10^-3=0.361
带入b)中数据得其闭环传递函数:0.0066S 3+0.124S 2+0.68S+27.10Ka +1=0或
S 3+18.38S 2+100S+3985.29Ka +147.06=0
由劳斯判定可求出系统稳定的开环增益:
s3 1 100
s2 18.51 4025.37Ka+149.25
s1  0
0
s0 3985.29Ka+147.06
若要使系统稳定,则
由 18.38×100-3985.29Ka-147.06=0
得到系统临界稳定时Ka=0.42
3)当参数设置为① R1=400K,C1=0.1µF,R2=361K,C2=1µF,R3=400K,C3=1µF时
T1=R1C1=361*0.25*10^-3=0.09
T2=R2C2=150*10^-3=0.15
T3=R3C3=361*10^-3=0.361
带入b)中数据得其闭环传递函数:0.0025 S 3+0.089S 2+0.62S+27.10Ka +1=0或
S 3+32.59S 2+229.6S+10037.04Ka +370.4=0
由劳斯判定可求出系统稳定的开环增益:
s3 1 229.6
s2 32.59 10037.04Ka+370.4
s1  0
0
s0 10037.04Ka+370.4
若要使系统稳定,则
由 32.59×229.6-10037.04Ka-370.4=0
得到系统临界稳定时Ka=0.708.
五. 结论与思考;
1. 由实测中所得临界稳定之Kɑ值是否与劳斯判据所计算值相同?
答:由于实验过程中存在着误差,如数据计算取值时结果的估算,所以实验中所得临界稳定之Ka值与劳斯判据所计算值之间存在偏差。
2.改变电容C1的值,临界放大系数有什么变化?试说明其变化理由。
答:改变电容C1,发现系统的稳定性会有所变化,但临界放大系数K与C1的取值无关,由于 K=K1K2K3Ka;所以C1的改变对K没有影响。
六.实验结论:
系统的稳定性只与系统固有特性有关,而与外界因素无关,取决与外界因素消失后暂态分量的衰减量,暂态分量的衰减量决定于系统闭环传递函数的特征根在S平面的分布:若所有特征根都分布于S平面的左侧,则系统式稳定的;若有特征根在S平面虚轴上,则系统处于临界状态;若所有特征根都在S平面的右侧,则系统是不稳定的。所以系统稳定的条件是:系统的闭环传递函数的特征方程的根都位于S平面的左侧。
七.实验总结报告
报告内容应包括你所设计的实验方案的理论依据,实验测定的方法,原始数据及数据处理结果,并对实验结果进行讨论。
1. 绘制实验记录
2. 实验结果分析、体会和建议。
实验数据记录单:
第二篇:自控实验报告2-时域系统分析和线性系统的稳定性研究
实验2——时域系统分析和线性系统的稳定性研究
1.研究性教学目的
① 学习二阶系统阶跃响应曲线的实验测试方法;
② 研究二阶系统的两个重要参数 对阶跃瞬态响应指标的影响;
对阶跃瞬态响应指标的影响;
③ 研究线性系统的开环比例系数K对稳定性的影响;
④ 研究线性系统的时间常数T对稳定性的影响。
2.知识点训练
① 自行设计二阶及三阶系统电路。
② 选择好必要的参数值,计算出相应的阶跃响应数值,进行仿真分析。
3.研究性要求
① 自行设计二阶及三阶仿真电路,可以使用Proteus\Multisim\EWB\Matlab等仿真软件;
② 针对各环节选择好必要的参数值,理论计算环节的输出响应;
③ 仿真分析环节的在典型输入信号作用下的输出波形。
4.研究性内容
实验一:典型二阶系统方块图和实现电路如图1-1所示。
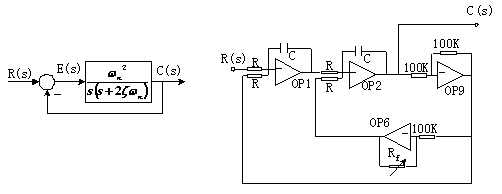
图1-1 二阶系统
闭环传递函数如下:
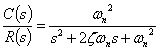 ,
, (T是时间常数)。
(T是时间常数)。
各运算放大器运算功能:
OP1,积分, ;
;
OP2,积分,;
OP9,反相,(-1);
OP6,反相比例, 。
。
可以得到:

实验一步骤
①  ,使
,使 ,
, ,取
,取 ,
, ,使T=0.47s,
,使T=0.47s, ,加入单位阶跃扰动
,加入单位阶跃扰动 ,记录响应曲线
,记录响应曲线 ,记作[1]。
,记作[1]。
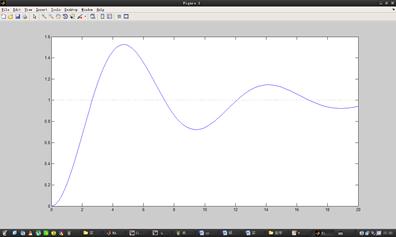
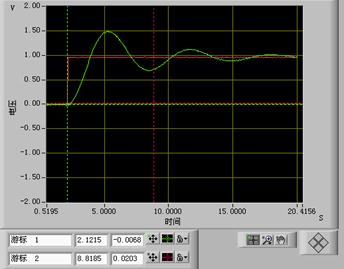
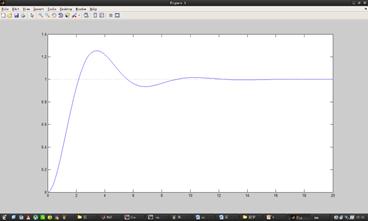
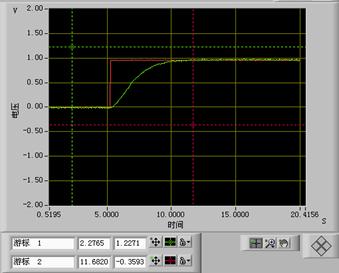
仿真结果

实验结果
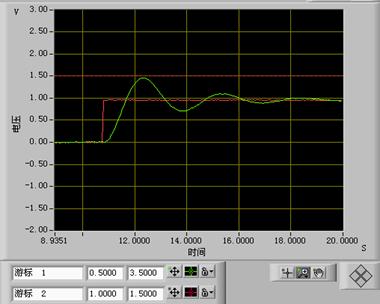
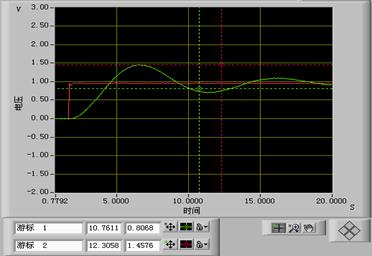
通过游标读图可以得到以下数据:
② 保持不变,单位阶跃扰动不变,取, ,使T=1.47s,
,使T=1.47s, ,记录响应曲线,记作[2]。
,记录响应曲线,记作[2]。
仿真结果
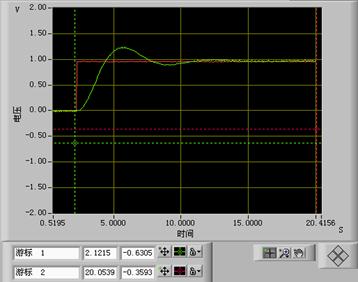
实验结果
③ 保持不变,单位阶跃扰动不变,取, ,使T=1.0s,
,使T=1.0s, ,记录响应曲线,记作[3]。
,记录响应曲线,记作[3]。
仿真结果

实验结果
④ 保持不变,单位阶跃扰动不变,取 ,使k=0.8,
,使k=0.8, ,记录响应曲线,记作[4]。
,记录响应曲线,记作[4]。
仿真结果
实验结果
⑤ 保持不变,单位阶跃扰动不变,取 ,使k=2.0,
,使k=2.0, ,记录响应曲线,记作[5]。
,记录响应曲线,记作[5]。
仿真结果

实验结果
要求:将曲线[1]、[2]、[3]进行对比,[3]、[4]、[5] 进行对比,将[3]中的 和理论值进行比较。并讨论。
和理论值进行比较。并讨论。
附加实验:
实验二步骤
① 求取系统的临界开环比例系数KC,其中:Cf1=Cf2=Cf3=0.47u;Ri3=1M。实验求取方法:
l 加入r=0.5V的阶跃扰动;
l 使系统输出c(t)呈等幅振荡。(t=5s/cm,y=0.5V/cm);
l 断开反馈线,维持r=0.5V的扰动,测取系统输出电压Uc,则 。
。
② 系统的开环比例系数K对稳定性的影响
l 观察K增大、减小时,系统的响应曲线;
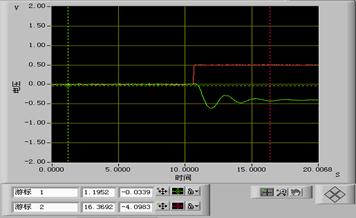
l 记录当K=0.5Kc时的系统响应曲线(t=5s/cm,y=100mV/cm);
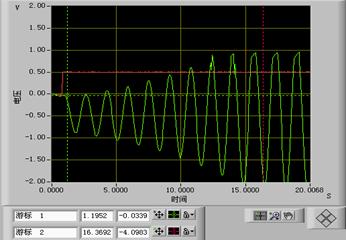
l 记录当K=1.25Kc时的系统响应曲线(t=5s/cm,y=0.5V/cm)。
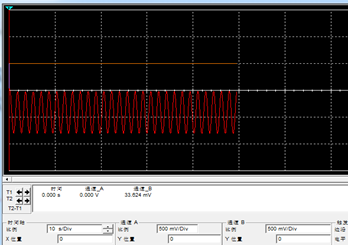
(1) 求取系统的临界开环比例系数KC
仿真结果:
R2=145k欧:
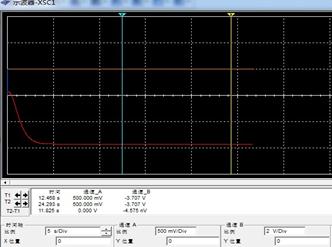
断开反馈线:
实验结果:
首先达到等幅振荡;
断开反馈线:

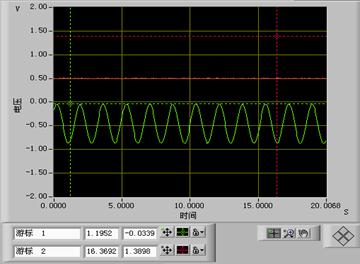
(2)系统的开环比例系数K对稳定性的影响
仿真结果:
当K=0.5Kc的时候,R2约为440k欧,对应的波形如下:
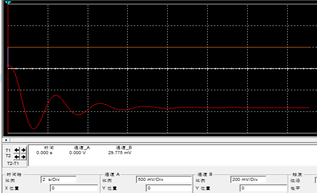
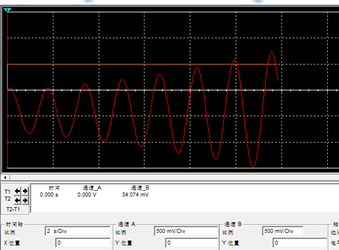
当K=1.25Kc的时候,R2约为115k欧,对应的波形如下:
实验结果:
K=0.5Kc
K=1.25Kc
-
实验一_系统响应及系统稳定性实验报告
一实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察及检验系统的稳定性二实验原理与方法在时域中描写系统特性的方法…
-
实验一:系统响应及系统稳定性
实验一系统响应及系统稳定性1实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察及检验系统的稳定性2实验原理与方法…
-
数字信号处理系统响应及系统稳定性实验报告
实验项目名称系统响应及系统稳应用FFT对信号进行频谱分析班级应用电子技术教育专业一班姓名学号实验一系统响应及系统稳定性一实验目的1…
-
实验一_系统响应及系统稳定性实验报告
山东建筑大学实验报告学院信息与电气工程学院班级电信112姓名学号课程实验日期年月日成绩实验一系统响应及系统稳定性一实验目的1掌握求…
-
数字信号处理实验一 系统响应及系统稳定性
实验一系统响应及系统稳定性一实验目的1掌握求系统响应的方法2掌握时域离散系统的时域特性3分析观察及检验系统的稳定性二实验原理与方法…
-
自控实验报告2-时域系统分析和线性系统的稳定性研究
实验2时域系统分析和线性系统的稳定性研究1研究性教学目的学习二阶系统阶跃响应曲线的实验测试方法研究二阶系统的两个重要参数n对阶跃瞬…
-
自动控制实验报告一-控制系统的稳定性分析
实验一控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1自动控制系统实验箱…
-
实验一 控制系统的稳定性分析
实验一控制系统的稳定性分班级光伏2班姓名王永强学号120xx09067实验一控制系统的稳定性分析一实验目的1研究高阶系统的稳定性验…
-
实验5 线性系统的稳定性和稳态误差分析
实验五自动控制系统的稳定性和稳态误差分析一实验目的1研究高阶系统的稳定性验证稳定判据的正确性2了解系统增益变化对系统稳定性的影响3…
-
自动控制实验报告三-控制系统的稳定性分析
实验三控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1ELATIII型自…
-
过程控制系统专题实验报告_孙鸿
XIANJIAOTONGUNIVERSITY过程控制系统专题实验实验报告姓名孙鸿班级自动化03学号10054070同组者无一实验名…