自动控制实验报告三-控制系统的稳定性分析
实验三 控制系统的稳定性分析
一、实验目的
1.观察系统的不稳定现象。
2.研究系统开环增益和时间常数对稳定性的影响。
二、实验仪器
1.EL-AT-III型自动控制系统实验箱一台
2.计算机一台
三、实验内容
系统模拟电路图如图3-1

图3-1 系统模拟电路图
其开环传递函数为:
G(s)=10K/s(0.1s+1)(Ts+1)
式中 K1=R3/R2,R2=100KW,R3=0~500K;T=RC,R=100KW,C=1mf或C=0.1mf两种情况。
四、实验步骤
1.连接被测量典型环节的模拟电路。电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入,将纯积分电容两端连在模拟开关上。检查无误后接通电源。
2.启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
3.检查USB线是否连接好,在实验项目下拉框中选中任实验,点击 按钮,出
按钮,出
现参数设置对话框设置好参数按确定按钮,此时如无警告对话框出现表示通信
正常,如出现警告表示通信不正常,找出原因使通信正常后才可以继续进行实验。
4.在实验项目的下拉列表中选择实验三[控制系统的稳定性分析], 鼠标单击按钮,弹出实验课题参数设置对话框。在参数设置对话框中设置目的电压U1=1000mV鼠标单击确认等待屏幕的显示区显示实验结果。
5.取R3的值为50KW,100KW,200KW,此时相应的K=10,K1=5,10,20。观察不同R3值时显示区内的输出波形(既U2的波形),找到系统输出产生增幅振荡时相应的R3及K值。再把电阻R3由大至小变化,即R3=200kW,100kW,50kW,观察不同R3值时显示区内的输出波形, 找出系统输出产生等幅振荡变化的R3及K值,并观察U2的输出波形。
6.在步骤5条件下,使系统工作在不稳定状态,即工作在等幅振荡情况。改变电路中的电容C由1mf变成0.1mf,重复实验步骤4观察系统稳定性的变化。
7.将实验结果添入表中:
五、实验报告
1.画出步骤5的模拟电路图。

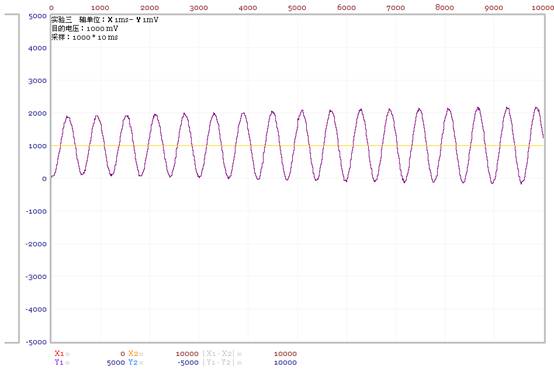
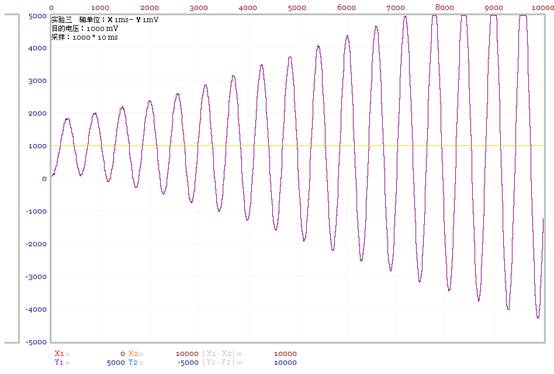
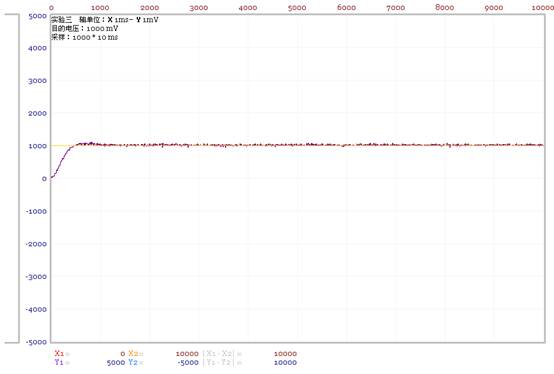
2.画出系统增幅或减幅振荡的波形图。
C=1uf时:
R3=50K K=5:

R3=100KK=10

R3=200K K=20:
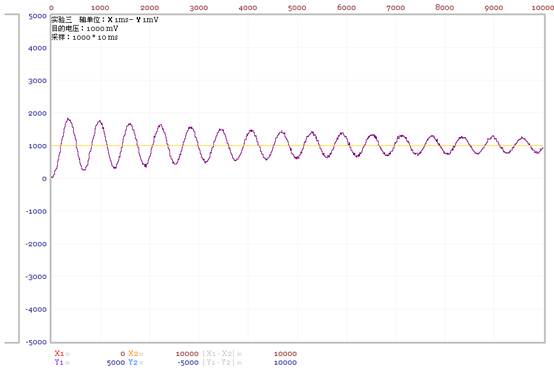
等幅振荡:R3=217k:

增幅振荡:R3=220k:
R3=260k:
C=0.1uf时:
R3=50k:
R3=100K:
R3=200K:
3.计算系统的临界放大系数,并与步骤5中测得的临界放大系数相比较。
实际测了得,临界放大系数是2.17,计算得系统的放大系数是2,相差不大,在可允许的误差范围内。
第二篇:计算机控制实验报告
计算机控制实验报告
班级: 姓名: 学号:
实验二 最少拍控制系统
1.实验结果
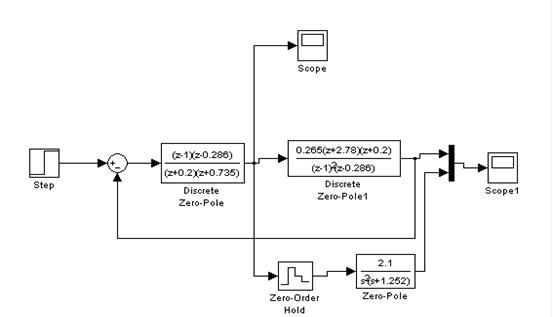
图2-1 单位阶跃输入下最少拍有纹波控制系统仿真结构模型
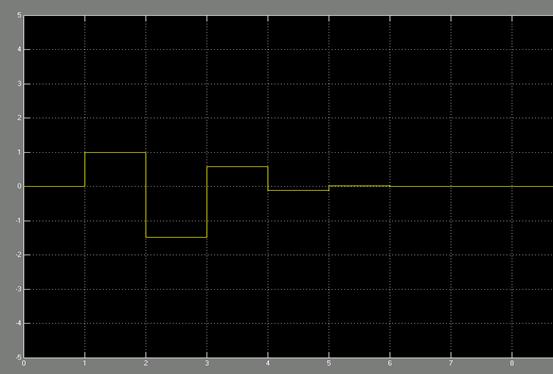
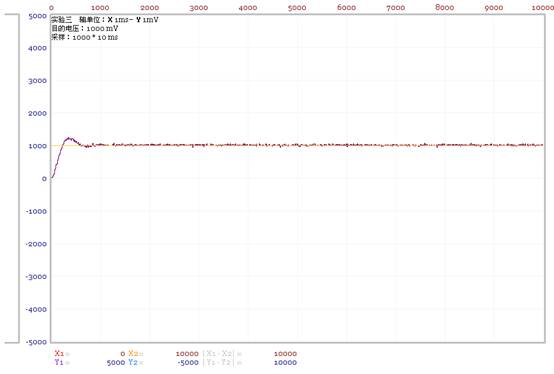
图2-2 单位阶跃输入下最少拍有纹波控制器输出
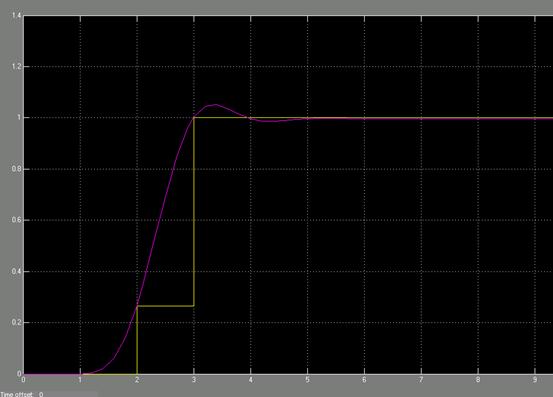
图2-3单位阶跃输入下最少拍有纹波系统输出
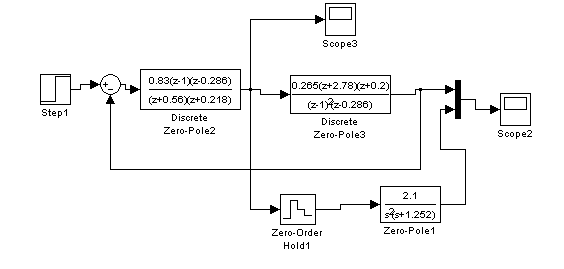
图2-4 单位阶跃输入下最少拍无纹波控制系统仿真结构模型
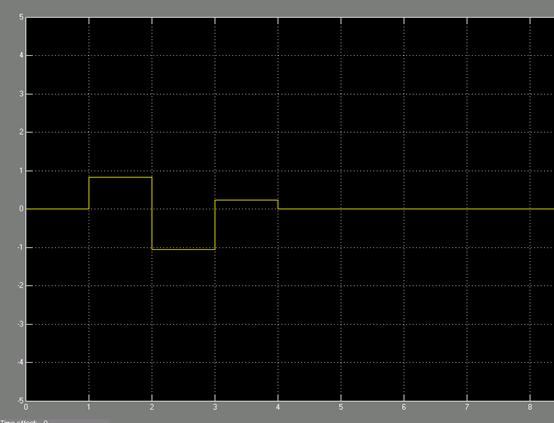
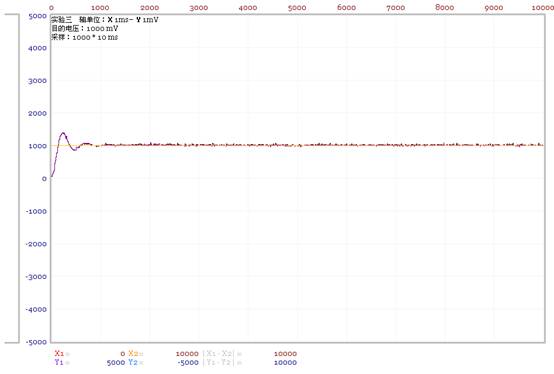
图2-5单位阶跃输入下最少拍无纹波控制器输出
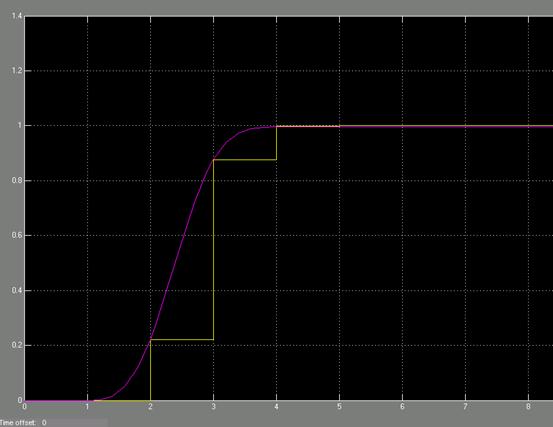
图2-6 单位阶跃输入下最少拍无纹波系统输出
2. 思考与分析
(1)最少拍受什么限制而使调整节拍增加?
答:设计出来的最少拍控制系统,在有限拍后进入稳态,只保证了在最少的几个采样周期后系统的响应在采样点时是稳态误差为零,而不能保证在任意两个采样点之间的稳态误差为零,即最少拍控制系统在采样时间精确的跟踪输入信号。所以最少拍受输入函数阶数的限制而使调整节拍增加,即输入函数的阶数越高,调解时间越长。
(2)无纹波系统对控制器有何要求?
答:最少拍无波纹对控制器有如下约束条件:
1. 被控对象G(S)有足够的积分环节。若输入为速度输入函数,被控对象G(s)的稳态输出也应为速度函数,因此就要求G(s)中至少有一个积分环节。若输入为加速度输入函数,则被控对象G(s)的稳态输出也应为加速度函数,要求G(s)中至少有两个积分环节。所以最少拍无纹波控制能够实现的条件是被控对象G(S)有足够的积分环节。
2. 必须包含G(z)中的圆外圆内全部零点N(z)。
必须包含G(z)中的圆外圆内全部零点N(z)。
(3)分析不同输入信号对最小拍控制系统的影响。
答:在单位阶跃函数作用下,输出响应经过一个采样周期T,输出与输入完全跟踪,即调整时间为一拍。同理在单位速度作用下经过两个采样周期T,输出与输入完全跟踪,即调整时间为二拍 。在单位加速度作用下经过三个采样周期T,输出与输入完全跟踪,即调整时间为三拍。即输入函数的阶数越高,调整时间越长。
实验三 纯滞后控制实验
1.实验结果
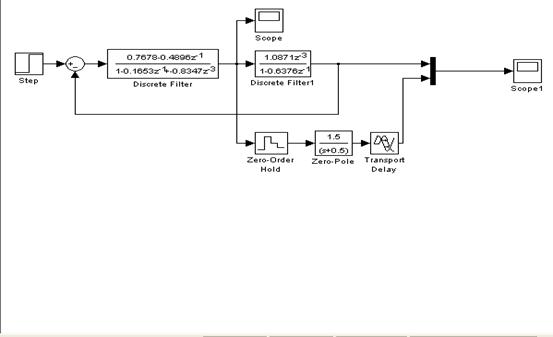
图3-1纯滞后控制系统仿真结构模型

图3-2 纯滞后系统控制器输出
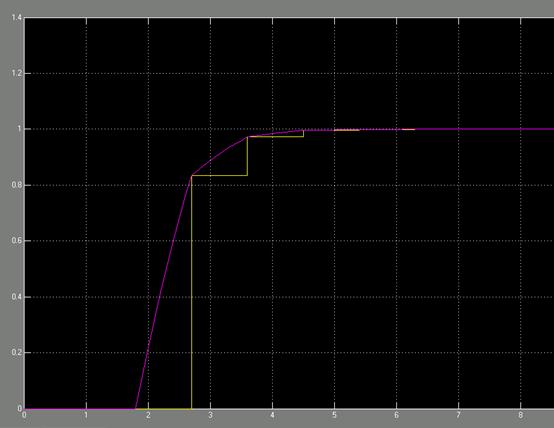
图3-3 纯滞后控制系统输出
2. 思考与分析
(1)纯滞后控制系统对阶跃信号有无超调?为什么?
答:纯滞后控制系统对阶跃信号有超调。因为被控对象中的纯滞后部分 仅将控制作用在时间坐标上推移了一个时间
仅将控制作用在时间坐标上推移了一个时间 ,被控对象具有纯滞后特性,时间常数很大,而被控对象的滞后时间会使系统的稳定性降低,动态性能变坏,即会引起超调和持续的振荡,因而纯滞后控制系统对阶跃信号也有一定的超调。
,被控对象具有纯滞后特性,时间常数很大,而被控对象的滞后时间会使系统的稳定性降低,动态性能变坏,即会引起超调和持续的振荡,因而纯滞后控制系统对阶跃信号也有一定的超调。
(2)纯滞后控制与PID控制有什么本质区别?
答:1.纯滞后控制:由于对象存在较大的纯滞后,采用单回路PID控制效果不佳。但常规单回路PID控制对一般对象控制效果较为理想,是生产过程中常用的一种控制方法。2.PID控制:比例控制能迅速反应误差,从而减小稳态误差。但是,比例控制不能消除稳态误差。比例放大系数的加大,会引起系统的不稳定。积分控制,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。但是积分作用太强会使系统超调加大,甚至使系统出现振荡。微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。应用PID控制,必须适当地调整比例放大系数KP,积分时间TI和微分时间TD,使整个控制系统得到良好的性能。纯滞后控制部分的达林算法是基于离散系统的设计方法,按照期望的传递性能设计控制器达到改善性能的目的,PID控制算法是基于连续系统的设计方法。
-
实验三、控制系统稳定性分析
实验三控制系统稳定性分析注意进入实验室前的要求学习教材108182和402405页内容电动机传递函数GmKTKT转矩系数La电感R…
-
自动控制实验报告三-控制系统的稳定性分析
实验三控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1ELATIII型自…
-
实验三 控制系统稳定性分析
实验三控制系统稳定性分析实验日期必填实验项目必填实验指导老师孙歆钰必填一实验目的通过观察典型三阶线性系统分析线性系统各参数对系统稳…
-
自动控制实验报告一-控制系统的稳定性分析
实验一控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1自动控制系统实验箱…
-
实验三 控制系统的稳定性分析
实验三控制系统的稳定性分析实验三控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实…
-
自控实验报告2-时域系统分析和线性系统的稳定性研究
实验2时域系统分析和线性系统的稳定性研究1研究性教学目的学习二阶系统阶跃响应曲线的实验测试方法研究二阶系统的两个重要参数n对阶跃瞬…
-
实验三 系统稳定性的研究的实验报告-何永强
系统稳定性的研究的实验报告学院机械工程学院班级09级过控2班姓名周军学号120xx240361实验三系统稳定性的研究一目的要求1验…
-
自动控制实验报告一-控制系统的稳定性分析
实验一控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1自动控制系统实验箱…
-
实验一 控制系统的稳定性分析
实验一控制系统的稳定性分班级光伏2班姓名王永强学号120xx09067实验一控制系统的稳定性分析一实验目的1研究高阶系统的稳定性验…
-
实验5 线性系统的稳定性和稳态误差分析
实验五自动控制系统的稳定性和稳态误差分析一实验目的1研究高阶系统的稳定性验证稳定判据的正确性2了解系统增益变化对系统稳定性的影响3…
-
过程控制系统专题实验报告_孙鸿
XIANJIAOTONGUNIVERSITY过程控制系统专题实验实验报告姓名孙鸿班级自动化03学号10054070同组者无一实验名…